纯电动汽车交流感应电机控制系统设计
2012-06-26谭延良胡燕娇盛碧云樊少波
谭延良,胡燕娇,盛碧云,樊少波
(江苏大学 电气信息工程学院,江苏 镇江 212013)
随着国际油价的不断攀升以及汽车尾气对大气污染影响的加重,出于国家能源安全和环境保护考虑,纯电动汽车由于无污染,能源消耗低等优点,已成为当前研究的热点。而电动汽车的2个关键是电池技术和电机控制系统,交流感应电机由于结构简单,体积小、成本低,功率密度比高等优点,而成为当前电动汽车驱动电机的主流[1],本文采用了microchip公司的DSPIC30F4011作为核心控制器,根据电动汽车电机控制系统的要求,对控制系统的硬件和软件进行了设计。采用转子磁场定向的矢量控制策略,设计了一款高效率低成本的纯电动汽车控制系统。
1 系统的硬件电路总体设计
本系统采用的是DSPIC30F4011处理器,如图1所示。该处理器是高性能的16位数字处理器,它集成了单片机(MCU)的控制功能以及数字信号处理器(DSP)的计算能力和数据吞吐能力,具有1KB的EEPROM,2KB的SRAM,以及6个电机控制专用PWM发生通道,9个10位的A/D转换通道,1个正交编码模块和1个CAN总线通讯模块。如图1所示,直流电源由铅酸电池提供,三相逆变桥采用多管并联的 MOSFET组成。电机接线采用三相星型连接,由于三相电流之和为零,因此,只需测量两相电流Ia,Ic即可,2路电流信号通过电流传感器送入芯片的AD采样端口,电机的转速信号经过正交编码器,送入芯片的正交编码器接口(QEI)以进行转速计算。电子油门采用霍耳式加速器,加速器信号送给芯片的AD采样端口,加速器微动开关和档位开关经过光耦隔离电路送给芯片I/O进行实时检测,DSPIC30F4011的6路PWM经过隔离驱动芯片控制开关管通断。CAN总线通讯模块采用可容错的高速CAN总线通信芯片MCP2551完成数据接受与发送功能,同时将实时采集的温度、档位、电子油门等信号送入相关显示单元。
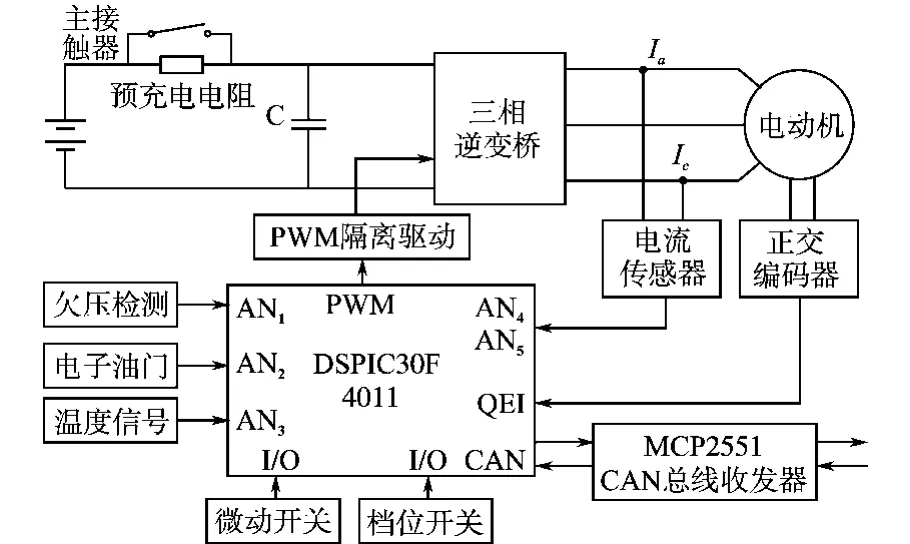
图1 硬件总体设计图Fig.1 The overall design of hardware
1.1 定子电流检测电路
通过检测定子电流实现对定子电流分量的闭环控制,电流检测电路的主要功能包括:电流传感器检测、滤波、电压跟随、电压偏置,以及限幅部分。如图2所示,该系统选用了南京托肯公司的TKC400F霍耳电流传感器进行电流检测,其输入额定电流为400A,测量电流范围为800A,由于电路中主要是高频信号,因此滤波环节采用有源低通滤波器。R3,R4为给滤波电路过来的交流信号提供电压偏置,再经跟随器和限幅电路保证输出给单片机的为0~5V信号。
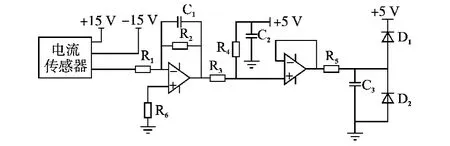
图2 定子电流检测Fig.2 Stator current detection
1.2 功率驱动电路
驱动电路选用IR公司的IR2110作为驱动芯片,它兼有光耦隔离(体积小)和电磁隔离(速度快)的优点,可用来直接驱动半桥,如图3所示,IR2110浮置电源采用自举电路,电容C2为自举电容,快速恢复二极管D1用来阻断直流干线上的高压,C3,C4为滤波电容。D2,D3为续流二极管。与大多数控制系统不同的是这里没有选用价格相对昂贵的IGBT开关器件,而是选用了N沟道的MOSFET器件,它具有高频特性好,开关损耗小,输入阻抗小,驱动功率小的优点,而IGBT通常存在电流拖尾的影响。PWM脉冲信号直接输出给IR2110的HIN和LIN引脚,用于驱动MOS管,SD为高电平时,驱动封锁。
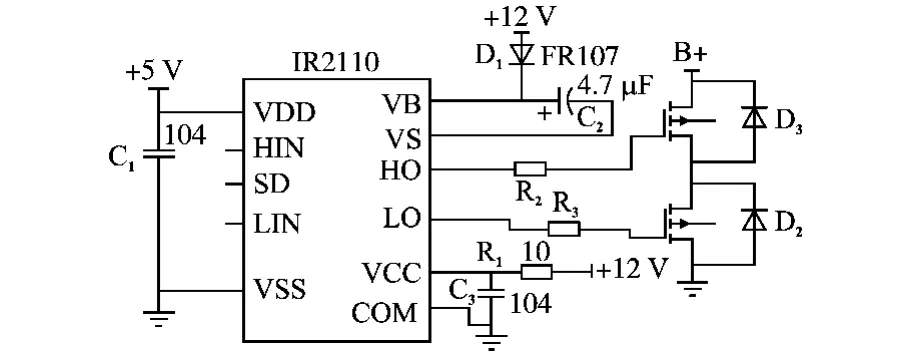
图3 MOS管驱动电路Fig.3 Driving circuit of MOSFET
针对 MOSFET耐流值的限制[2],通过并联多个MOSFET来实现提高耐流值的目的。由于MOSFET的通态电阻具有正的温度系数,约为0.4%~0.8%,有利于采样多 MOSFET管并联。多只元件并联工作时,MOSFET间可以自动均流,通过多管并联增加其传导能力,节约了电路设计成本。
1.3 控制系统电源设计
控制系统主要使用了±15V,±12V,5V,5个等级的电源。为满足控制系统较好的电气性能和较低的成本,该系统正电源选用高性能电流模式PWM发生器控制器UC3845作为核心控制器,采用单端反激式结构。控制电路采用电压、电流双闭环控制系统,以保证输出电压恒定。与传统的线性电源相比,该电源电路结构简单,成本低、体积小、易实现。控制系统所需负电源由基于LM555定时器的多谐振荡器实现。
1.4 转速检测设计
电机转速检测的正确性和精度将直接影响整个交流电机调速系统的性能指标和控制精度,影响转速检测结果精度因素主要有2个:一是系统硬件,二是速度估算法。本系统采用正交编码器来检测电机转速,正交编码器输出的相位相差90°的2路脉冲信号经过高速光耦6N137进行隔离和反相电路输出给DSPIC30F4011的正交编码器接口(QEI)。速度估算采用的是测周法与测频法相结合的方法,采取这种方法误差小,精度高。
1.5 过温保护设计
过温保护采用的是NTC(负温度系数热敏电阻),其电阻值较高;温度低时,内部载流子数目少,电阻值较高。随着温度的升高,载流子数目增加,所以电阻值降低。NTC热敏电阻器在室温下的变化范围为10~1000000,它的测量范围一般为-10~+300℃。该系统设定的过温值为80℃,一旦温度超过80℃,系统停止运行。电路通过电阻分压的形式使输出保证在5V以下,然后送给处理器ADC模块。
1.6 欠压,过压,过流保护模块设计
该控制系统同时还包括了欠压,过压,过流保护模块,当蓄电池电压低于或者高于所设定最低或者最高电压时,通过比较器作用输出欠压信号,启用欠压保护。当流经开关管的电流值大于设置最大电流时,启用电流保护电路,输出封锁信号,禁止PWM输出。保护控制系统不受损坏。
2 控制系统软件设计
2.1 转子磁场定向的矢量控制策略
矢量控制是在交流电机上模拟直流电机转矩的控制规律。磁场定向坐标通过矢量变换,将三相电流解耦成励磁电流分量与转矩电流分量,并使这2个分量相互垂直,彼此独立,然后动态调节以获得像直流电机一样的调速特性。如图4所示,该系统采用的是基于转子磁场的矢量控制策略[3-8],采用转速、电流的双闭环结构,转速、电流调节器都采用PI调节器。电流传感器测量三相中的Ia,Ic两相的电流值,经过DSPIC30F4011的A/D转换成数字量,再通过Clarke变化和Park变换将电流转换成M轴和T轴中的直流分量作为电流环的负反馈。利用正交编码器测得电动机的机械角位移,将其转换为转速n,把转速n作为负反馈量。对于交流感应电机而言,机械角位移并不等于转子磁链的角速度,因此,必须通过电流模型计算出转子磁链位置角θ,用来参与Park变换和逆变换。给定转速Nref与转速反馈量n的偏差经过速度PI调节器,其输出作为用于转矩给定电流Iqref,和励磁电流分量Idref再经过PI调节器,分别输出MT坐标系相电压分量,再通过Park逆变换产生αβ坐标轴定子相电压矢量Vα与Vβ,经过电压空间矢量脉宽调制产生6路PWM控制信号去控制逆变器,从而实现交流感应电机的全数字控制。
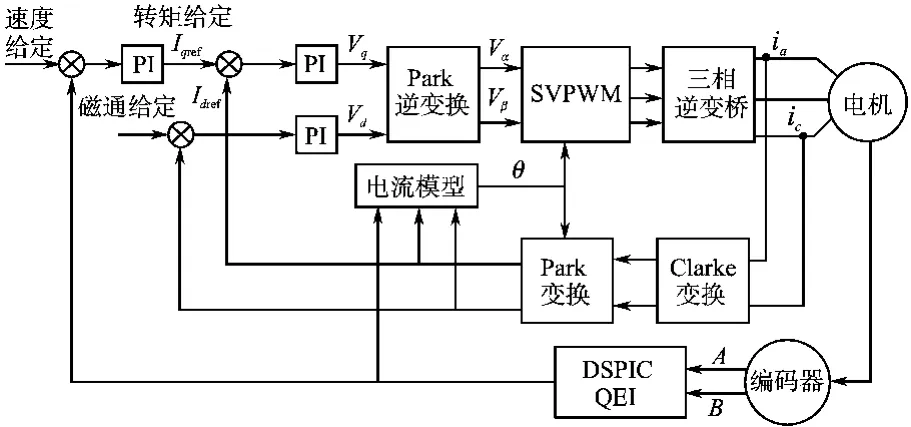
图4 交流感应电机磁场定向矢量控制系统结构图Fig.4 Structure of AC induction motor field oriented vector control system
2.2 控制系统软件设计流程
如图5所示,软件模块主要包括了主程序流程图和空间电压矢量控制(SVPWM)中断子程序流程图,系统上电首先通过自检,如果自检不通过,则报警提示停机。然后等待中断的发生,中断模块主要包括了4个中断子程序:PWM中断,用于SVPWM的产生;ADC中断,主要用于电流、电压、温度的采样;以及故障中断子模块,故障中断模块对产生的故障采取相应的措施,本文主要给出SVPWM中断的软件实现。
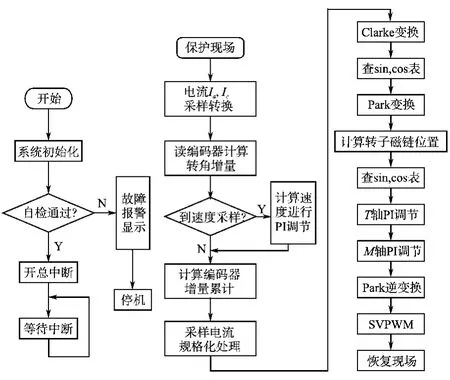
图5 主程序与PWM中断子程序流程图Fig.5 Flow chart of main programme and PWM interruption sub programme
3 实验结果
电机额定功率PN=7.5kW,额定转速定子绕组电阻Rs=0.59Ω,转子绕组Rr=0.45Ω,UN=220V,IN=25A,电机磁极对数p=2,在给定转速为1400r/min,空载启动下的响应结果如图6所示。
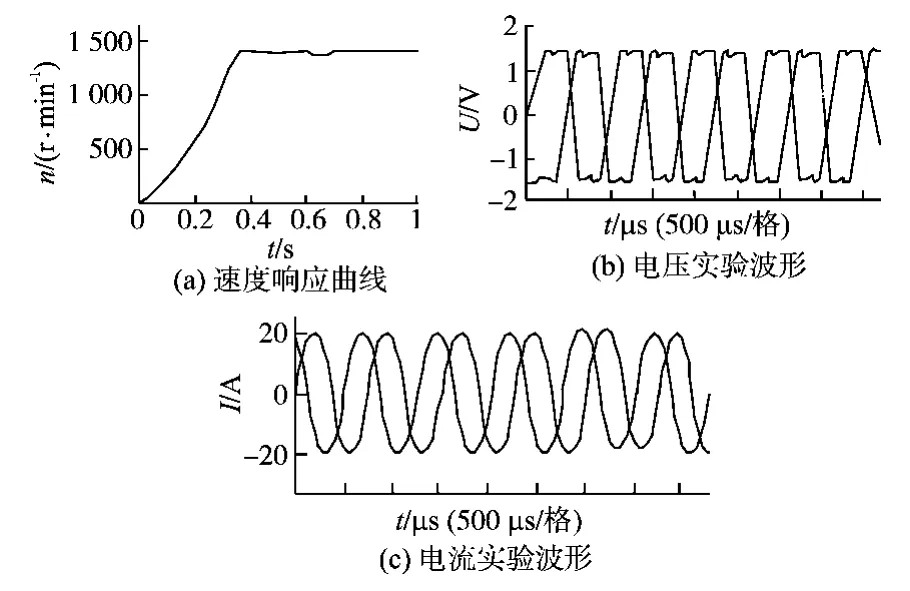
图6 空载启动下的响应结果Fig.6 Response results without load start-up
4 结论
提出了电动汽车交流控制系统的设计方案,本文没有选用价格相对昂贵的IPM功率芯片,而是采用MOSFET多管并联的方法增加耐流值,减少开发成本。同时利用低成本,高可靠性的数字信号处理器DSPIC30F4011,分别对控制系统的电流检测,控制系统电源,转速检测,以及过流、过温等保护的硬件电路进行了设计。结合矢量控制策略,对系统的软件模块进行了设计。实验结果验证了该系统具有良好的控制精度和较高的可靠性,较易应用于工程实践。
[1]王贵明,王金懿.电动汽车及其性能优化[M].北京:机械工业出版社,2010.
[2]李叶松,黄恒,雷力.高性能全数字交流感应机驱动系统的研究[J].电力电子技术,2004,38(2):76-77.
[3]SHENG Zhan-shi,LIANG Jun,JING Liang,et al.A Novel Current Dectection Technology for a Permannet-magnet,Brshless DC Motor[C]∥Chenlong.Germany,2011:274-276.
[4]王克奇,曲发义.电动汽车交流驱动系统[J].东北林业大学学报,2002,30(5):73-74.
[5]张旭宁,郑泽东,李永东.矿山机车无速度传感器矢量控制系统[J].电气传动,2010,40(4):16-19.
[6]熊茂.基于DSP的电动汽车交流驱动电机矢量控制研究[D].武汉:武汉理工大学,2006.
[7]余胜.基于DSP的异步电机矢量控制系统设计[J].电子元器件应用,2009,11(10):15-16.
[8]李祥飞,刘鹏.基于矢量控制的电动汽车用异步电机控制系统设计[J].电力电子技术,2010,44(7):38-39.
