气动通用上下料机械手结构设计
2012-06-21贺东坤
贺东坤,田 明
(长春理工大学 光电工程学院,长春 130022)
1 上下料机械手总体设计
1.1 机械手总体设计方案
对气动机械手的基本要求是能快速、准确地拾放和搬运物件,这就要求它们具有高精度、快速反应、一定的承载能力、足够的工作空间和灵活的自由度及在任意位置都能自动定位等特性。该机械手采用气缸作为动力源,能够快速、准确地拾放和搬运物件。设计气动机械手的原则是:充分分析作业对象(工件)的作业技术要求,拟定最合理的作业工序和工艺,并满足系统功能要求和环境条件;明确工件的结构形状和材料特性,抓取、搬运时的受力特性、尺寸、质量参数等,从而进一步确定机械手的结构;本设计多数选用了定型的标准组件,简化了设计制造过程,兼顾通用性和专用性,并能实现柔性转换和编程控制。
本文设计出机械手的各执行机构,包括:手部、手腕、手臂的设计。该机械手是通用气动上下料机械手,因此相对于专用机械手来说,它的适用面更广,是一种适合于成批或中、小批生产的、可以改变动作程序的自动搬运或操作设备,它可用于操作环境恶劣,劳动强度大和操作单调频繁的生产场合。总体结构如图1所示。

图1 气动通用上下料机械手总体结构图1.联接螺栓 2.油雾器 3.手臂回转气缸 4.底板5.回转液压缓冲器 6.手臂升降气缸 7.立柱 8.箱盖9.手部 10.腕部回转气缸 11.手臂伸缩气缸12.伸缩液压缓冲器 13.控制阀 14.升降液压缓冲器15.气管 16.箱体 17.气泵接口
1.2 机械手各组成部分设计方案
为使机械手实现各种运动和姿态,机械手如图2所示,设计成四个自由度,并采用圆柱座标型式。各部分设计方案如下:
1.2.1 手臂设计
按照抓取工件的要求,本机械手的手臂有三个自由度,即手臂的伸缩、左右回转和升降运动。按照实际要求,手臂伸缩行程600mm,升降行程200mm,回转范围0°~240°。
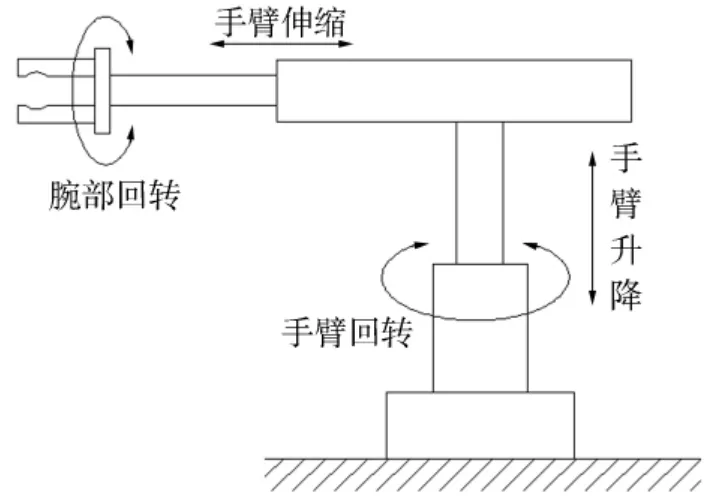
图2 机械手自由度分配示意图
1.2.2 手部设计
为了使机械手的通用性更强,把机械手的手部结构设计成可更换结构,当工件是棒料(φ80~φ150mm)时,使用夹持式手部;当工件是板料(面积不大于0.5m2)时,使用气流负压式吸盘。夹持式手部可抓重10kg,吸附式手部可抓中5kg。
1.2.3 腕部设计
由于被抓取工件是水平放置,因此手腕设有回转运动以满足工作的要求。实现手腕回转运动的机构为回转气缸。回转范围0°~180°。
2 机械手手部结构设计
2.1 夹持式手部结构设计
夹持式手部结构按照实际工作情况要求,设计成一支点两指回转型。它由手指(或手爪)和传力机构所组成,传力机构主要有夹紧缸体、活塞、齿条活塞杆、扇形齿轮等构件组成。手部详细结构如图3所示。该手部结构具有足够的夹紧力和一定的开闭角,保证了最大尺寸工件能够顺利的进入和脱开。由于被抓取工件的形状多为圆柱形,故手指形状设计成“V”形,以便自动定心,从而使手指和被夹持工件保持准确的相对位置。
手部夹紧气缸驱动力计算:
如图4所示,最大工件重量G=10kg,“V”形手指的角度2θ=120°,b=120mm,R=24mm,摩擦系数f=0.1,气缸驱动力为P。

图3 夹持式手部结构1.夹紧缸体 2.活塞 3.齿条活塞杆 4.弹簧5.扇形齿轮 6.带轴齿轮 7.手指 8.密封圈

图4 手部传动示意图
根据手指夹持工件的方位,可得握力计算公式:


因为传力机构为齿轮齿条传动,故取η=0.94,并取K1=1.5。被抓取工件的最大加速度取a=g时,则:

所以夹持工件时所需夹紧气缸的驱动力为1563(N)。
2.2 气流负压式吸盘
图5所示为可调的喷射式负压吸盘结构图。喷嘴口与喷嘴套之间留有适当的间隙,以便将被抽气体带走。当间隙太小时,喷射气流和被抽气体将由于与套壁的摩擦而使速度降低,因而降低了抽气速率;当间隙太大时,离喷射气体越远的气体被带着向前运动的速度就越低,同时间隙过大,从喷嘴套出口处反流回来的气体就越多,这就使抽气速率大大的降低。在图5中,喷嘴5与喷嘴套6的相对位置是可以调节的,以便改变间隙的大小,可使喷嘴更有效地工作。

图5 可调喷射式负压吸盘结构1.橡胶吸盘 2.吸盘芯子 3.通气螺钉4.吸盘体 5.喷嘴 6.喷嘴套
3 手臂伸缩与腕部回转结构设计
该机械手的手臂结构如图6所示,手臂主要由双作用式气缸1、导向杆2、定位拉杆3和两个可调定位块4等组成。双作用式气缸1的缸体固定,当压缩空气分别从进出气孔进入双作用式气缸1的两腔时,空心活塞套杆11带动手腕回转缸5和手部一同往复移动。在空心活塞套杆11中通有三根伸缩气管,其中两根把压缩空气通往手腕回转气缸5,一根把压缩空气通往手部的夹紧气缸。在双作用式气缸1缸体上方装置着导向杆2,用它防止活塞套杆11在做伸缩运动时的转动,以保证手部按正确的方向运动。手臂伸缩运动的行程大小,通过调整两块可调定位块4的位置而达到。手臂伸缩运动的缓冲采用液压缓冲器实现。手腕回转是由回转气缸5实现,直线气缸1内的三根气管采用了伸缩气管结构,其特点是机械手外观清晰整齐,并可避免气管的损伤。另外活塞套杆11做成筒状零件可增大活塞套杆的刚性,并能减少充气容积,提高气缸活塞套杆的运动速度。

图6 手臂伸缩与回转部分结构图1.双作用式气缸 2.定位拉杆 3.导向杆 4.可调定位块5.右进气孔 6.定片 7.左进气孔 8.动片 9.回转缸体10.可伸缩气管 11.空心活塞套杆 12.活塞 13.密封圈14.管接头 15.后罩

图7 手臂升降与回转部分结构图1.转柱 2.升降缸活塞轴 3.导向杆 4.升降缸体5.碰铁 6.定位块 7.定位拉杆 8.缓冲铁块9.回转中间定位块 10.回转定位块 11.定位块连接盘12.定片 13.转轴 14.动片 15.回转缸体 16.支撑架 17.套筒
4 手臂升降与回转结构设计
其结构如图7所示。手臂升降装置由转柱1、升降缸活塞轴2、升降缸体4、碰铁5、可调定位块6、定位拉杆7、缓冲撞铁8、定位块联接盘11和导向杆3等组成。转柱1上钻有六条气路,在转柱上端用管接头和气管分别将压缩空气引到手腕回转气缸、手部夹紧气缸、手臂伸缩气缸,转柱下端的气路,将压缩空气引到升降缸上腔,当压缩空气进入上腔后,推动升降缸体4上升,并由两个导向杆进行导向,同时碰铁5随升降缸体4一同上移,当碰触上边的可调定位块6后,即带动定位拉杆7、缓冲撞铁8向上移动碰触升降用液压缓冲器进行缓冲。当J、K两面接触时而定位。上升行程大小通过调整可调定位块6来实现。最大可调行程为170mm,缓冲行程根据抓重和手臂移动速度的要求亦可调整,其范围为15-30mm,故上升行程最大值为200mm。手臂下降靠自重实现。
在本机械手中,手臂回转装置由回转缸体15、转轴13(它与动片焊接成一体,见A-A剖面)、定片12、回转定位块10、回转中间定位块9和回转液压缓冲器等组成。当压缩空气通过管路分别进入手臂回转气缸的两腔时,推动动片连同转轴一同回转,转轴通过平键而带动升降气缸活塞轴、定位块联接盘、导向杆、定位拉杆、升降缸体和转柱等同步回转。因转柱和手臂用螺栓连接,故手臂也作回转运动。手臂回转气缸采用矩形密封圈来密封,密封性能较好,手臂回转角度的大小,通过调整两块回转定位块10和回转中间定位块9的位置而定。
(1)该机械手可以选择配置普通的夹持手指,以抓取一般工件;也可更换喷射式气流负压吸盘,以吸附玻璃、墙地砖等板料及光盘、磁盘等薄型不透气工件,使机械手的用途更多,使用范围更广。另外,该机械手既可以用于搬运小型零件,也可供教学、实验使用。
(2)该机械手腕部采用回转结构,可以实现回转运动,以保证工件按工作要求摆放。手臂采用双作用式汽缸,可以实现伸缩、升降、回转运动。
[1]郭洪红.工业机器人技术[M].西安:西安电子科技大学出版社,2006.
[2]刘极峰,易际明.机器人技术基础[M].北京:高等教育出版社,2006.
[3]孙兵,赵斌,施永辉.基于PLC的机械手混合驱动控制[J].液压与气动,2005(3):37-39.
[4]安江波,孙昌将,凌华.水下机械手结构设计与研究[J].机械工程与自动化,2009(2):91-95.
[5]Hayshi S,Ganno K,Ishii Y,et al.Robotic harvesting system for eggplants[J].Jpn Agr Res Q,2002,36(3):163-168.
