GPS在大型水利枢纽建筑物变形监测中的应用
2012-06-15葛义荣
葛义荣
(河北省黄壁庄水库管理局,河北 鹿泉 050224)
GPS作为一种全新的现代空间定位技术,使测量工作产生了质的飞跃,它具有不受雨、雾、风等不利气象环境影响,不受通视条件限制,可全天候观测并且可实时测定点位的三维空间坐标等特点。GPS精密定位技术已在大地测量、地壳变形监测、精密工程测量等诸多领域得到了广泛的应用和普及。对黄壁庄水库这样一座具有特长型大坝,枢纽建筑物多并且分散的水利工程,采用 GPS建立三维监测网,可在汛期、高水位及库水位骤降等紧急情况下,直接对变形监测点进行同步三维监测,快速获取监测点变形数据,为科学决策和合理调度提供依据。从而解决常规监测方法观测周期长、受气候环境影响大、布网困难、观测精度难以达到要求等问题。
1 工程概况
黄壁庄水库位于河北省鹿泉市黄壁庄镇,距石家庄市 30 km,是滹沱河中下游重要的、控制性的大(I)型水利枢纽工程,总库容 12.1亿 m3。水库枢纽建筑物主要由主坝、副坝、重力坝、正常溢洪道、非常溢洪道、新增非常溢洪道、灵正渠涵管及电站组成。水库以防洪为主兼顾城市供水、灌溉、发电等任务。其大坝位于平原与丘陵结合处,属特长型水中倒土均质坝。主坝坝顶长 1843 m,坝顶高程 128.7 m,最大坝高 30.7 m。副坝坝顶长 6907.3 m,坝顶高程 129.2 m,最大坝高 19.2 m。混凝土重力坝全长 136.5 m,最大坝高28.0 m,坝内设发电洞和输水洞。正常溢洪道设有 8孔净宽 12 m的溢流堰。非常溢洪道有 11孔净宽 7.8 m的溢流堰。新增非常溢洪道设有 5孔净宽 12 m的溢流堰。
大坝自建成后,变形观测系统一直没有完善,部分建筑物只间断性地进行了垂直位移观测。由于这些数据不连续,经历洪水时,无法正确判定大坝的运行状况,给决策和调度带来盲目性。随着大坝除险加固工程的开展,坝体上的原有监测点将全部报废,因此建立完善的大坝变形监测系统,对各建筑物重点部位进行变形监测,准确掌握大坝的运行规律,对于科学地进行水库调度非常必要。

表1 黄壁庄水库变形监测点布设统计
2 变形监测点布设
黄壁庄水库大坝表面变形监测系统由基准点、工作基点和变形监测点组成。监测部位为主坝、副坝、重力坝、正常溢洪道、非常溢洪道、新增非常溢洪道。变形监测点布设见表 1。
基准点是大坝表面变形监测系统的基础,点位布设必须保证坚固和稳定,并且在变形区以外,水平位移监测网由 3点组成,点名分别为 GPS01,GPS02,GPS03,大致分布在大坝左、中、右 3个位置,达到以最少的点位数量获得最佳控制精度的基准网。
3 大坝表面水平变形监测
使用 Trimble双频 GPS接收机,监测网坐标采用 WGS84坐标系统。将 GPS01,GPS02,GPS03三个基准点的首期数据的无约束平差坐标固定,作为变形监测基准网零数据。
3.1 观测时段确定
将观测时段划分为 30 min,60 min和 120 min(两时段),进行观测时间与精度之间的关系分析。分别计算出 60 min与 120 min及 30 min与 120 min的观测误差,并进行统计和分析,其结果见表 2。
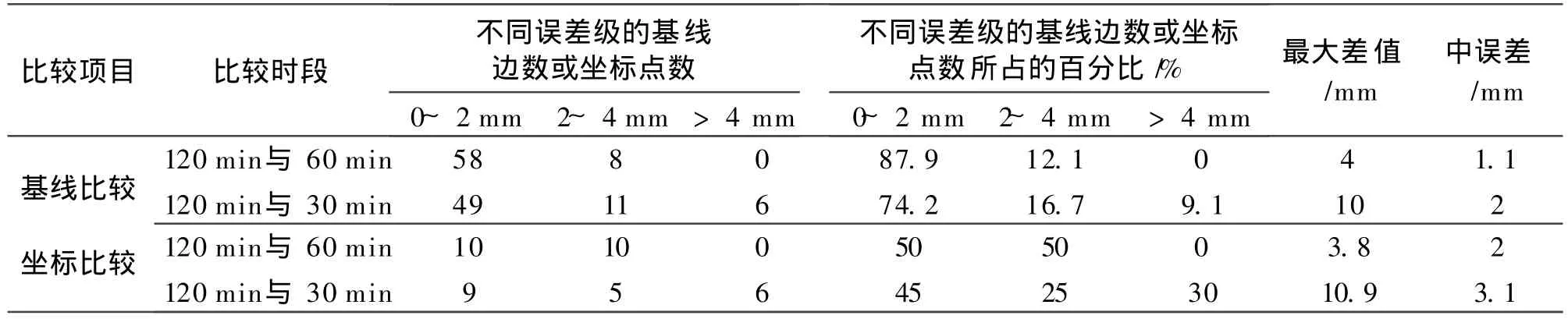
表2 不同观测时段的精度比较
由表 2得知,60 min与 120 min解的基线精度相当,87.9%的差值集中在 0~2 mm范围内,最大的差值为 4 mm。而 30 min与 120 min解的基线差值较大,最大差值为 10 mm。 60 min解与 120 min解的点位差平均分布在 0~4 mm之内,最大点位差为 3.8 mm。从 30 min解与 120 min解的点位差可以看出,点位差明显变大,最大值差值为 10.9 mm。
以上数据统计分析表明,采用 120 min两时段观测,精度最高,但工作量较大。而 30 min时段作业效率高,但其精度低,不能满足精度要求。60 min一时段观测,点位精度小于专三级控制网 5 mm指标要求,作业效率较 120 min两时段提高一倍,因此,时段观测时间采用 60 min。
3.2 观测网形确定
将基准点、工作基点、校核基点以及主、副坝监测断面坝顶上的变形点一并纳入主网统一观测。为提高GPS网的精度与可靠性,GPS点间构成尽量多地由 GPS独立边组成异步环,使 GPS网有足够的多余观测,平均每点设站 2~3次。
3.3 GPS静态网测量技术
采用 4台美国 Trimble公司生产的双频 GPS接收机进行观测,仪器标称精度为 5 mm+D×10-6mm,配有可抑制多种径效应的扼径圈天线。作业方式采用静态相对定位模式。对基准网和工作网的作业规格参照《水利水电工程测量规范》进行:①时段观测时间 60 min;②数据采样率 15 s;③卫星截止高度角 15°;④观测卫星不少于 5颗;⑤天线对中精度不大于 1 mm;⑥卫星与测站组成的图形强度因子 PDOP值≤8;⑦观测前后,由 3个方向测量天线高,两次之差不大于 2 mm。
3.4 基线处理
3.4.1 基线解算
水库监测网基线解算采用美国 Trimble Geomatics Office ver1.61随机软件,广播星历解算,基线结果采用双差固定解。在基线解算过程中,为确保基线的质量可靠,提高成果的精度,禁用一些残差比较大的、观测时间比较短的卫星;根据实际情况,禁用一些残差比较大的、周跳比较严重的时段。然后对基线进行再处理,分析比率、参考变量及 RMS值(RM S值≤0.03,Ratio值≥3),直至取得基线的最优解。
3.4.2 基线精度
为提高 GPS测量的精度与可靠度,基线解算结束后,应及时计算同步环闭合差、异步环闭合差以及重复边的检查计算,GPS同步环闭合差反映的是一个同步环数据质量的可靠性,GPS异步环闭合差反映的是整个 GPS监测网外业观测质量和基线解算质量的可靠性。各环闭合差应符合规范要求。
3.5 GPS网平差
GPS基线解算完成后,在 WGS84坐标系下对 GPS基准网进行三维无约束平差。平差中的参数设置为:①置信度采用 95%;②最终收敛限差为 5 mm;③仪器高度误差≤1 mm;④对中误差为 1 mm;⑤应用纯量到各观测值;⑥纯量类型为交替的。
在基线解算质量检核的基础上,为了更准确地对各个点的坐标进行比较,在基准网无约束平差的基础上,利用无约束平差后的 GPS01,GPS02,GPS03的坐标,对其他各网在 WGS84坐标系下进行约束平差,这样可消除已知点的误差影响,从而更能体现出监测点的位移情况。在平差过程中对一些含有粗差的边进行剔除,平差后分析平差报告,直到报告中的各项限差均满足要求。
4 水平位移监测分析
4.1 基准网稳定性分析
在变形监测中,基准网的稳定性是非常重要的,只有基准网稳定,才能准确测定大坝监测点的位移情况。通过对基准网复测、变化量统计,得出 GPS03变化量最大,为 3.89 mm。采用单点稳定性检验的方法(t检验法),取显著水平为 0.05,对水平位移基准网稳定性进行检验,计算得 t<FT/2,判断水平位移基准网各点不存在显著性位移,处于稳定状态,且观测精度小于专三级平面控制网规定的±5 mm指标。
4.2 监测点位移稳定性分析
为客观掌握大坝上各监测点位移情况,在确定各期观测精度一致的前提下,采用 t检验法对水平位移监测点进行单点稳定性检验,在 95%置信水平下,主、副坝上有部分水平位移监测点存在显著性位移,每期有20个点左右,约占总测点数的 1/3,各期平均位移量在 3 mm左右,有时出现整体变形峰值,有时出现变形回落现象,这种波动性变形,符合大坝的正常变形规律。
通过对监测数据的位移显著性分析,部分测点虽然存在变形的显著性,但这并不意味着大坝存在潜在的危险。大坝的变形规律是:在第一次蓄水后的最初几年,存在着不可逆转的时效变形,以后主要受水位和气温的影响,呈近似正弦曲线的规律而做周期变化。具体实测值则与坝型、坝高、坝的刚度、监测部位、水位和气温年变化幅值等一系列因素有关。《混凝土坝安全监测技术规范》中明确了不可逆的时效变形量值,坝顶水平位移 10~20 mm。到目前监测结果来看,大坝及其建筑物位移均在安全变形范围内,整体处于稳定状态。
5 结语
GPS在黄壁庄水库大坝变形监测网的应用,提高了工作效率,操作简单,节省了人力,且全天候监测,观测进度和精度都符合要求,达到了以最有效的监测方案获取最可靠的监测数据的目的。监测结果表明,大坝及其建筑物整体处于安全稳定状态。以 GPS基准网对大型水利枢纽建筑物进行整体控制,这也为大坝自动化监测工作奠定了基础。
[1]张勤.GPS测量原理及应用 [M].北京:科学出版社,2010.
[2]王海城.黄壁庄水库大坝变形监测网设计 [J].河北水利水电技术,2003(5):45-46.
[3]CH2001-92,全球定位系统(GPS)测量规范 [S].
[4]SL197-97,水利水电工程测量规范:规划设计阶段 [S].
