船载测量雷达定位方法研究
2012-06-08周立锋
周立锋
(92941 部队,辽宁 葫芦岛 125001)
0 引言
雷达是用来发现和跟踪目标并对其进行定位的电磁系统。作为自主定位的测控装备,雷达有其自身优势,相比GPS 抗电磁干扰能力强。与光学测量设备不一样,雷达在黑暗、雾霾和雨雪中都能对目标进行定位,可进行24 h 全天候测量。雷达数据录取的频率高、测量的诸元多,能够自成系统进行数据处理,并便于实现测量和数据处理的自动化,可缩短试验的周期。
随着测量任务需要的发展,比如卫星发射,测控任务越来越重,传统的固定站点雷达布站方案已不能满足测量的需要。船载测量雷达由于其布站灵活性,可以布设在海洋中,具有比较大的优势。船载测量雷达作为活动站,其数据处理方法与固定站点测量雷达的处理方法不尽一致。
1 坐标系定义
在船载雷达测量坐标系下,目标的测量参数为斜距R、方位角A和俯仰角E。为方便分析目标航迹,需将测量坐标系的测量值转换到WGS-84 坐标系。在航迹参数解算中,需要用到以下几个坐标系。
1.1 测量坐标系
船载雷达的原始测量数据是基于测量坐标系下的,其原点Oc在雷达方位轴与俯仰轴的交点,OXc轴在大盘平面内指向方位轴输出为零的方向,OYc轴铅垂向上,OZc轴与OXc轴构成右手直角坐标系[1],如图1所示。

图1 测量坐标系
1.2 甲板坐标系
甲板坐标系原点Oj为惯性导航平台三轴交点,OXj轴在甲板平面内指向船艏,OYj轴垂直甲板向上,OZj与轴与OXj轴、OYj构成右手直角坐标系,如图2所示。
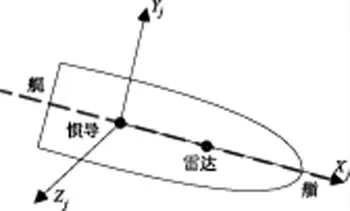
图2 甲板坐标系
1.3 地平坐标系
地平坐标系原点Og为惯性导航平台三轴交点,OXg轴在当地水平面内指向真北,OYg轴铅垂向上,OZg轴与OXg轴、OYg构成右手直角坐标系[2],如图3所示。
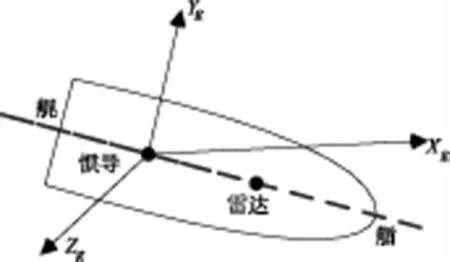
图3 地平坐标系
1.4 WGS-84 坐标系
目前,在航迹参数解算时,坐标系一般采用WGS-84 坐标系。WGS-84 坐标系原点O为地球质心,OX 轴为过原点指向国际时间局BI1984.0时元定义的零子午面和国际时间局BI1984.0时元定义的协议地球赤道的交点;OY 轴为过原点指向国际时间局BI1984.0时元定义的协议地球东向,并垂直于OX 轴;OZ 轴为过原点平行于国际时间局BI1984.0时元定义的协议地球极轴(CTP)方向[3-4],如图4所示。
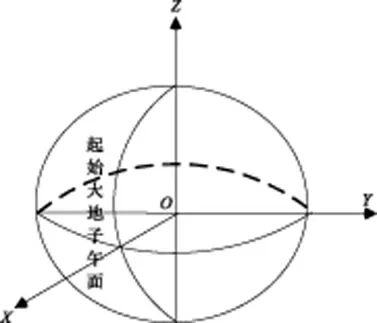
图4 WGS-84 坐标系
2 定位算法分析
船载雷达测量得到的是测量坐标系下的球面坐标,在参数解算时,要进行数据预处理、误差修正和方位角跨零等处理,并进行船位修正、船体变形修正和船姿修正。
下面主要分析船载雷达测量坐标系到WGS-84 坐标系的坐标变换过程,船载测量坐标系到WGS-84发射坐标系转换流程,如图5所示。

图5 坐标系转换流程图
2.1 测量坐标系到甲板坐标系的转换
由于雷达测量的测量值是测量坐标系下的斜距R、方位角A和俯仰角E,所以首先得把球面坐标转换到直角坐标,其转换公式如下:

测量直角坐标系到甲板坐标系:

式中B为变形的等效欧拉角矩阵,其形式如式(4),用测量坐标系相对甲板系的3个变形角代替3个船摇角。Xj0、Yj0、Zj0为测量坐标系原点在甲板坐标系的坐标。
2.2 甲板坐标系到地平坐标系的转换
甲板坐标系到地平坐标系的转换公式如下:

其中

式中Kc、Ψc、为输出的航向角、纵摇角和横摇角测量值。
航向角Kc为甲板坐标系OXj轴与地平坐标系OXg在XOZ 平面的夹角,即船艏艉线与真北的夹角,向右为正;纵摇角Ψc为甲板坐标系OXj轴与地平坐标系OXg在XOY 平面的夹角,向上为正;横摇角为甲板坐标系OZj轴与地平坐标系OZg在YOZ 平面的夹角,右舷向下为正。
2.3 地平坐标系到WGS-84 坐标系的转换
地平坐标系到WGS-84 坐标系的转换公式如下:

其中
式中Lc、Bc为提供的船的经度和纬度;Xg0、Yg0、Zg0为地平坐标系原点在地心坐标系的坐标。
3 算例分析
下面分析的数据是某次任务雷达跟踪飞机的数据。飞机上加装了GPS 高精度测量系统,载波相位差分定位时其动态距离测量精度为0.2 m,GPS 数据转换到雷达站点其测角精度为0.01 mrad。GPS定位采用的是WGS-84 坐标系,把GPS定位结果数据转换到雷达测量坐标系,给雷达定位结果数据比对分析当真值。用文中算法得到的雷达定位结果与GPS 数据作一次差比对分析,其具体情况如图6~8所示。图中,横轴为时间,单位s;纵轴为一次差,单位为m 或毫弧度。一次差的均值和标准差如表1所示。

图6 斜距R 一次差
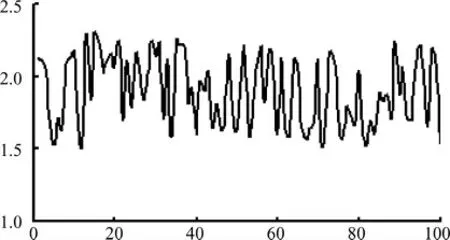
图7 方位角A 一次差
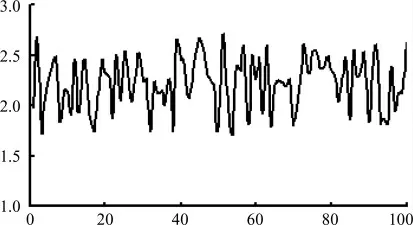
图8 俯仰角E 一次差

表1 一次差均值与标准差
4 结束语
通过算例数据分析,本文采用的雷达定位方法合理正确,精度高,能够满足测量需求,能在测量的相关领域推广应用。但是,由于雷达测量体制的原因,要想得到更高精度的定位数据,在雷达的设计和制造过程中还需进一步提高装备本身的精度。
[1]简仕龙,费加兵,刘冰.航天测量船海上测控技术概论[M].国防工业出版社,2009:390.
[2]张守信.外弹道测量与卫星轨道测量基础[M].北京:国防工业出版社,1992:62-63.
[3]朱华统,郑育富.大地测量[M].北京:测绘出版社,1987:342-344.
[4]罗海银.导弹航天测控通信技术词典[M].北京:国防工业出版社,2001:448-449.
