基于FLUENT的多体船阻力研究
2012-06-07杨陈林张忠宇杨帆郑
张 杨陈 林张忠宇杨 帆郑 律
(1.哈尔滨工程大学 船舶工程学院 哈尔滨150001;
2.上海船舶运输科学研究所 上海 200135)
0 引 言
近几十年来,高性能船舶由于在耐波性、快速性、经济性等方面的优越性,获得了巨大的发展[1]。多体船作为高性能船的一个重要方向,进展也较快。船舶阻力可以分为摩擦阻力、兴波阻力和粘压阻力,其中又以摩擦阻力和兴波阻力为主。一般采用相当
1 双体船的阻力性能研究
双体船的船型及水动力研究相对成熟,本文针对小水线面双体船(SWATCH)进行阻力计算,并与相关经验公式进行对比,以验证计算模型的合理性[2]。
1.1 计算模型的建立
本文的计算模型为SWATH数学船型。其水下片体由圆柱体平行中体、首尾两端各为半个椭圆球体的主体,以及垂直水面方向的等截面柱体支柱组成,如图1所示。
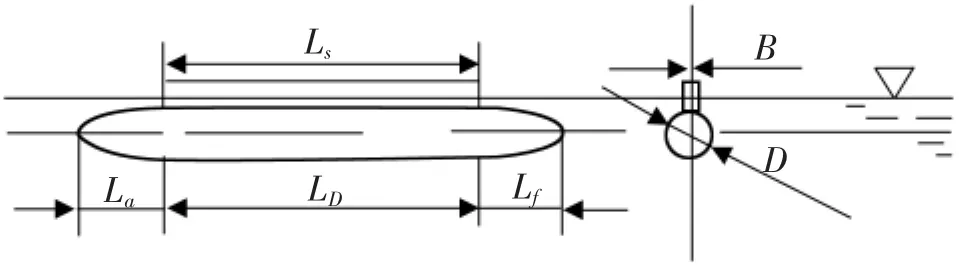
图1 船型水下片体结构
图1中各特征尺度见表1。

表1SWATH数学船模特征尺度单位:m

速度入口位于SWATH首部上游1倍船长处,压力出口位于SWATH船尾下游3倍船长处,周向无剪力固壁边界位于自SWATH中心线向外延伸1倍船长处。由于SWATH片体之间的距离通常很大,为了减少网格数量以便于简便计算,在计算其粘性绕流时忽略片体之间的相互影响,在SWATH中心对称面采用对称边界条件Symmetry。采用RNG k-ε模型的湍流模式,对流项使用QUICK格式离散,扩
支柱的半宽水线为抛物线,由式1表达:散项为中心差分格式,采用SIMPLE法进行压力场和速度场的耦合求解,自由液面捕捉用VOF法,计算过程使用多重网格法加快收敛速度。计算域顶部及远方边界为滑移壁面,船体表面为不可滑移壁面。计算时为获得稳态流动计算结果,采用时间步进法。从研究结果来看,时间步长对计算结果及收敛性有一定的影响。本文所采取的时间步长为无因次的,其值为0.001。初始时刻水面为静水面,并使用入口处流动参数来初始化流场[3]。
1.2 经验公式推导
为了验证FLUENT软件计算得到的结果,本文将计算得到的粘性阻力系数和半理论、半经验方法估算的粘性阻力系数进行比较。在计算中,粘性阻力系数Cv和雷诺数Re的计算如下[4]:

式中:Rv为粘性阻力;
ρ为流体密度;
U为航速;
S为湿表面积;
υ为流体运动粘性系数。
将SWATH的粘性阻力分为支柱粘性阻力和主体粘性阻力两部分:

式中:下标s为支柱; h为主体。式中Rvs、Rvh分别满足式(5)、式(6):
形状因子表示水中结构的粘性阻力与相当平板摩擦阻力之比,主要取决于物体的几何外形和雷诺数。因为SWATH的支柱与主体的形状比较规则,所以采用经验公式来计算形状因子能够保证计算的精度。可将双体船的支柱看成一个狭长的机翼来处理,由于机翼尾端与水下部分主体相连接,使支柱周围垂向水流流动受到约束,可将支柱等效为二维机翼,其周围流动近似用二维流动等效,这样用机翼理论可得到支柱的形状因子公式:

式中:t为支柱的最大厚度(此处支柱宽度为B)。
SWATH的主体为一规则回转体,因此用霍纳(Hoener)建议的回转体形状因子公式来计算其形状因子:

1.3 计算结果分析
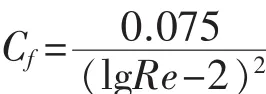
选取1 m/s和5 m/s两个速度进行计算,计算结果如图2所示。
图2 FLUNET计算的SWATH阻力情况
如图2所示迭代7 000步左右时,两种工况下的船舶阻力均已收敛,计算模型有效。航速增加时,双体船的总阻力增加很快。
图3为不同航速下的双体船后自由液面兴波形状,图中箭头方向为船体航行方向,下文相同。船后自由液面产生的兴波形状,在一定情况下体现了船舶兴波状况的优劣,因此由图3可以看出,航速从1 m/s增加到5 m/s后,船后兴波最大高度从1.37 m变为1.49 m,由此得出双体船周围兴波高度随着航速的增加(相对于阻力的增加)增加不大,这证明了小水线面双体船良好的兴波性能。

图3 FLUENT计算的双体船船后兴波形状
表2为计算得到的粘性阻力系数和半理论、半经验方法估算的粘性阻力系数比较,表中Cvj为经验公式计算的Cv,Cvr为软件计算的Cv。
从表2中可以看出两种计算方法的阻力系数比较接近。这从一定程度上说明了用FLUENT软件来预报SWATH粘性阻力是可行的。经验公式估算方法固然可以用来预报SWATH船型的粘性阻力,但从估算公式(5)~(8)可以看到,经验公式估算方法不能精确预报船型与粘性阻力的关系,更无法得到粘性绕流场的流动细节,因此运用FLUENT软件计算船舶的阻力有其必要性。
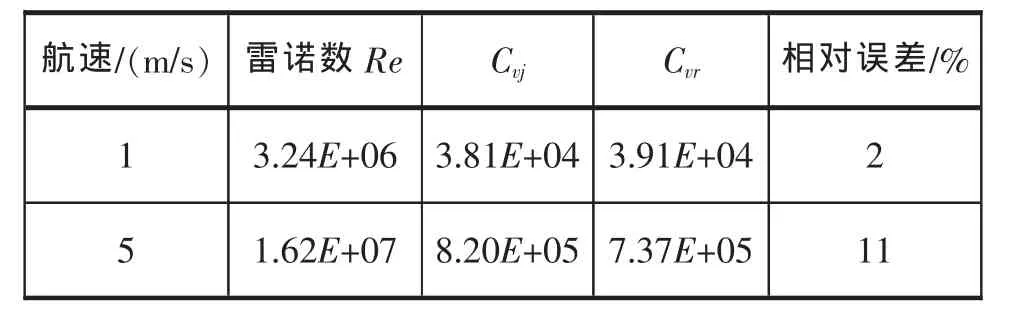
表2 FLUENT计算值与经验公式比较
2 三体船的阻力性能研究
2.1 计算模型的建立
由于小水线面三体船与小水线面双体船的型线非常相似,只是在其两个片体中间再增加一个片体,所以为了快速建立小水线面三体船下体模型,可运用已有的小水线面双体船型线进行改进[5-8]。以第1节中所述的小水线面双体船为母型船,在其纵中剖面再增加一个相同的片体,图4、图5分别为本文所设计小水线面三体船中横剖面图及网格划分。
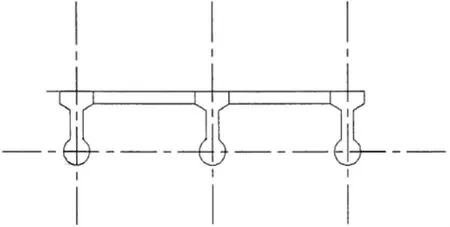
图4 计算模型简图
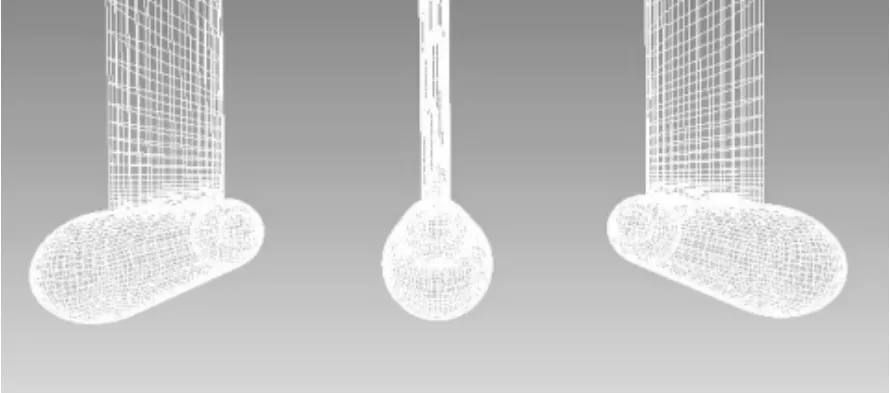
图5 船体外网格划分
2.2 计算结果分析
2.2.1 船体的阻力
选取1 m/s和5 m/s两个速度进行计算,计算结果如图6所示。
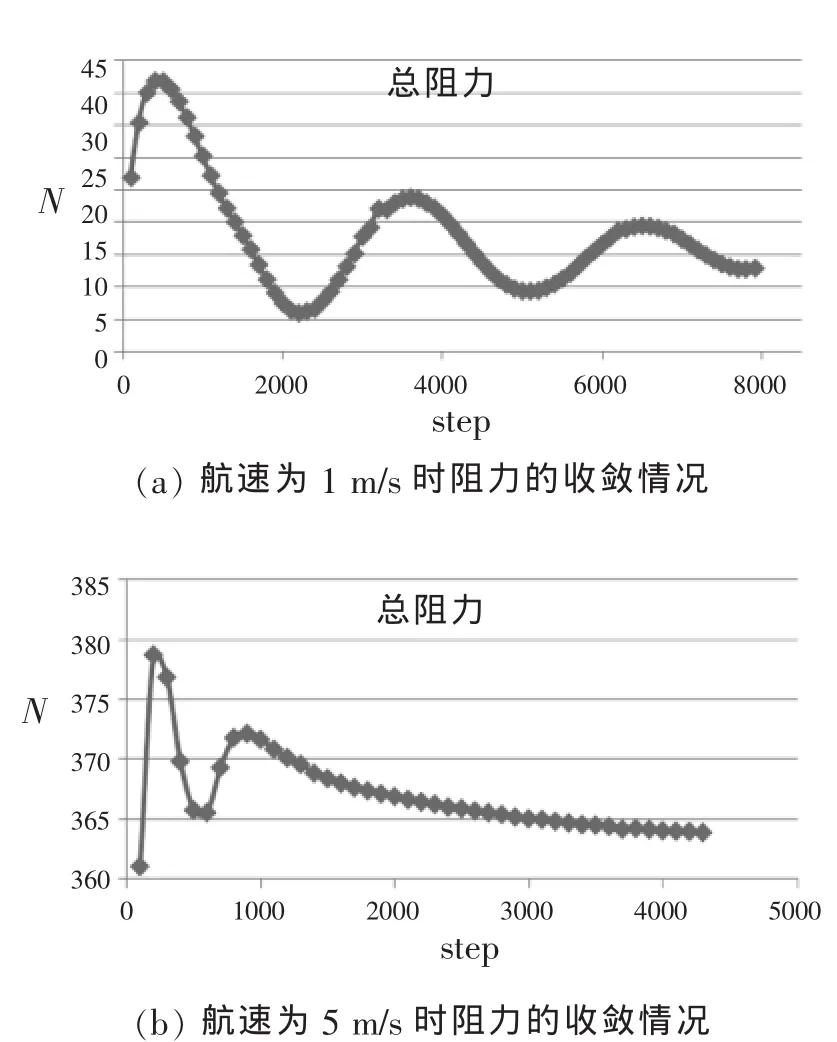
图6 FLUNET计算的三体船阻力情况
由图6可知,航速为5 m/s比航速为1 m/s时的总阻力要大得多,并且其收敛速度也较快。分析对比发现其主要原因为:在航速较高的情况下,总阻力中兴波阻力占大部分,所以速度大时,兴波阻力也大,并导致总阻力变大。同时比较图6和图3得到:在相同航速下,三体船的总阻力比双体船明显增大,这与三体船的水下湿表面积增大有关系。
2.2.2 船体的周围流场分布
在不同速度下的三体船流场如图7所示。
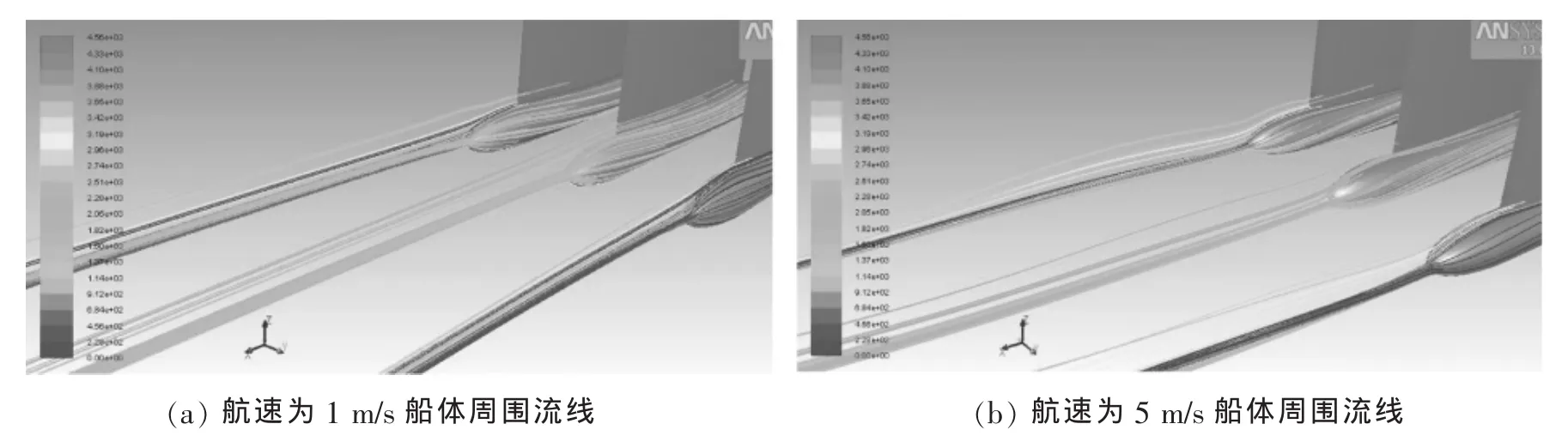
图7 FLUENT计算的三体船船体周围流线
从图7中可以看出,随着航速的增加,三体船侧体产生的流线在流出船体后,产生远离船体中纵剖面的趋势。中体的流线变化趋势不大。
FLUENT中并不能得到兴波阻力的具体数值,但可以获得船后产生的自由液面兴波形状,在一定情况下体现了船舶兴波性能的优劣。图8为不同航速下的三体船后自由液面兴波形状。
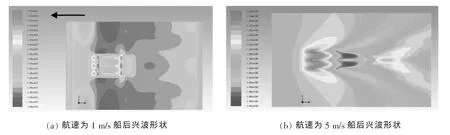
图8 FLUENT计算的三体船船后兴波形状
将图8与图3比较可知,三体船速度从1 m/s增加到5 m/s时,船后兴波最大高度从1.36 m增加到1.49 m。由图8可以看出:在相同速度下,三体船的兴波高度与双体船相比差距不大,并没有显著提高其兴波阻力特性。造成这种情况的原因可能是三体船的总体兴波特性与中体的位置关系十分紧密,计算模型中,中体采取的位置并不能显著提高三体船的兴波性能,这在三体船设计过程中需要十分注意。
3 四体船阻力性能研究
3.1 计算模型的建立
由于双体船的湿表面积很大,在高傅汝德数下,兴波阻力增加很大,对其增加航行速度影响很大。通过研究发现,缩短双体船水下部分的筒体长度可以有效提高船舶的高速运动性能[9]。关于四体船的实验数据较少,Henri W.Zajic在《Optimization of an Advanced High Speed Hull Form》中对几种小水线面四体船模型进行了船模试验。本部分对其中一个模型M-2进行计算。其主尺度如表3所示。
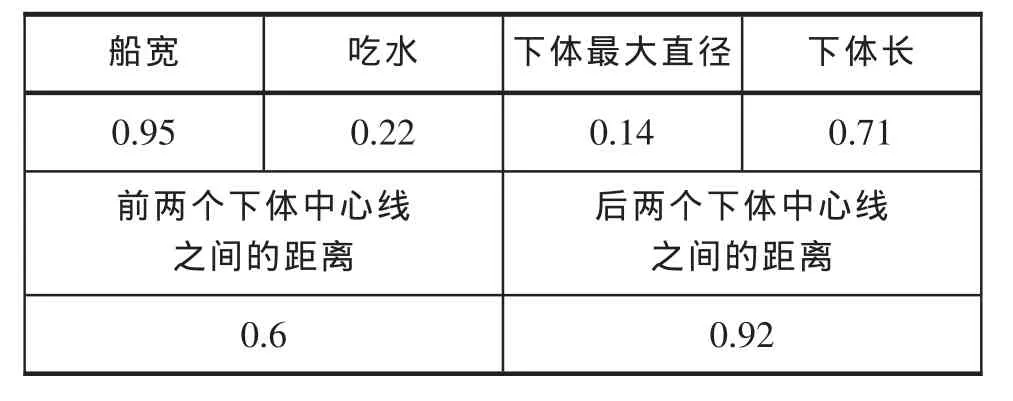
表3 四体船船模的型线尺度单位:m
具体来说,其下潜体是以NACA0020翼型为原型,在其中部加入一段矩形作为平行中体旋转而得。其支柱为垂直于水面方向的等截面柱体,支柱的截面为NACA0010翼型。建立的模型如图9所示。
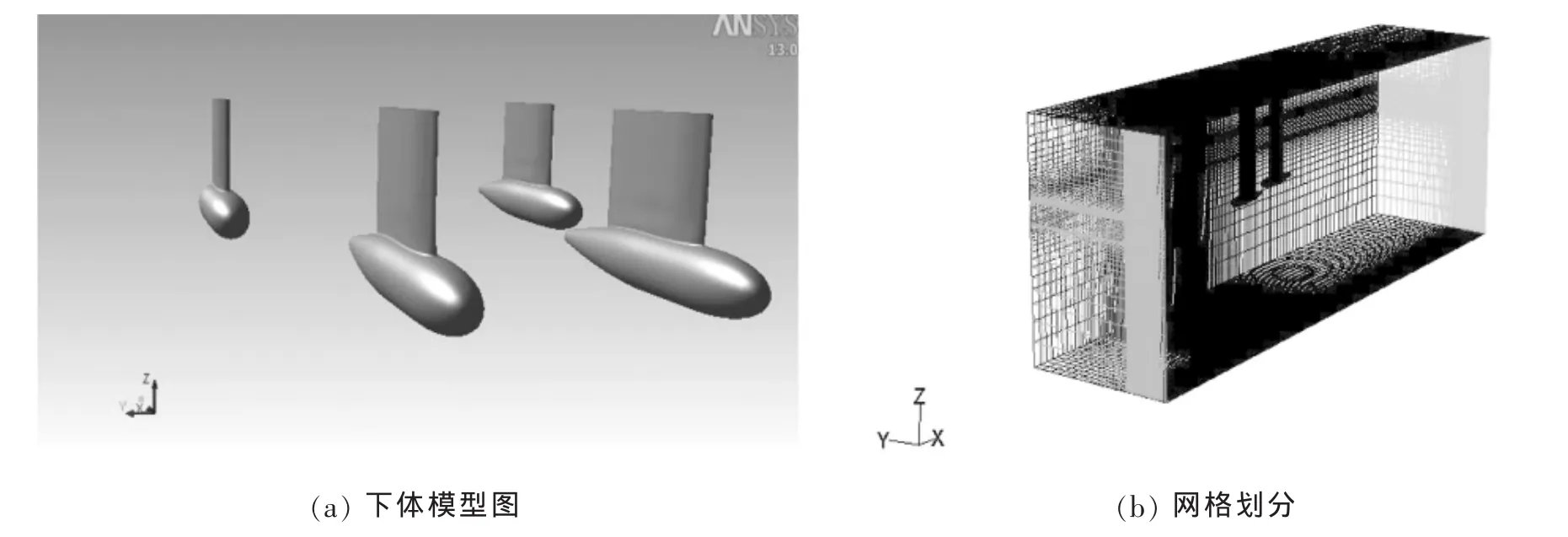
图9 四体船船型下体示意图
网格划分是借助GAMBIT来实现的。网格采用分块结构化网格,计算域为一个长方体,纵向自船首向前延伸1倍船长,船尾向后延伸3倍船长;横向由纵中剖面向两侧延伸1.2倍船长,从静水面向下延伸1.1倍船长,向上延伸0.6倍的船长。由于对称,计算域只取整个流域的一半。为了更好地捕捉流动特征,网格在船首、船尾和和静水面附近进行了加密[3]。
3.2 船体的周围流场分布
在不同速度下的四体船流场如图10所示。

图10 FLUENT计算的四体船船体周围流线
从图10中可以看出,起先,随着航速的增加,前体产生的流线在流出船体后,趋近船体中纵剖面;随着航速增加,这种现象反而开始减轻;当航速为5 m/s时,流线又回复为初始状态,变为一条直线。说明船后流线的形状随着航速的增加在不断变化。
表4为不同航速下四体船后兴波最大高度。
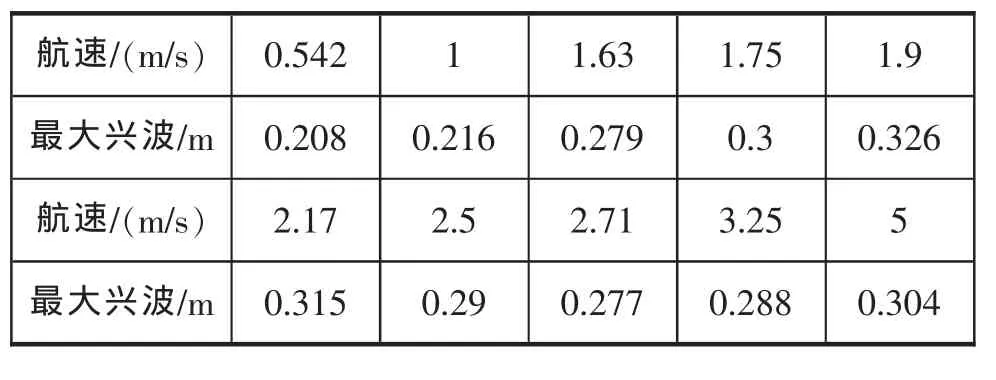
表4 不同航速下四体船的船后兴波最大高度
FLUENT计算的四体船船后兴波形状如图11所示。
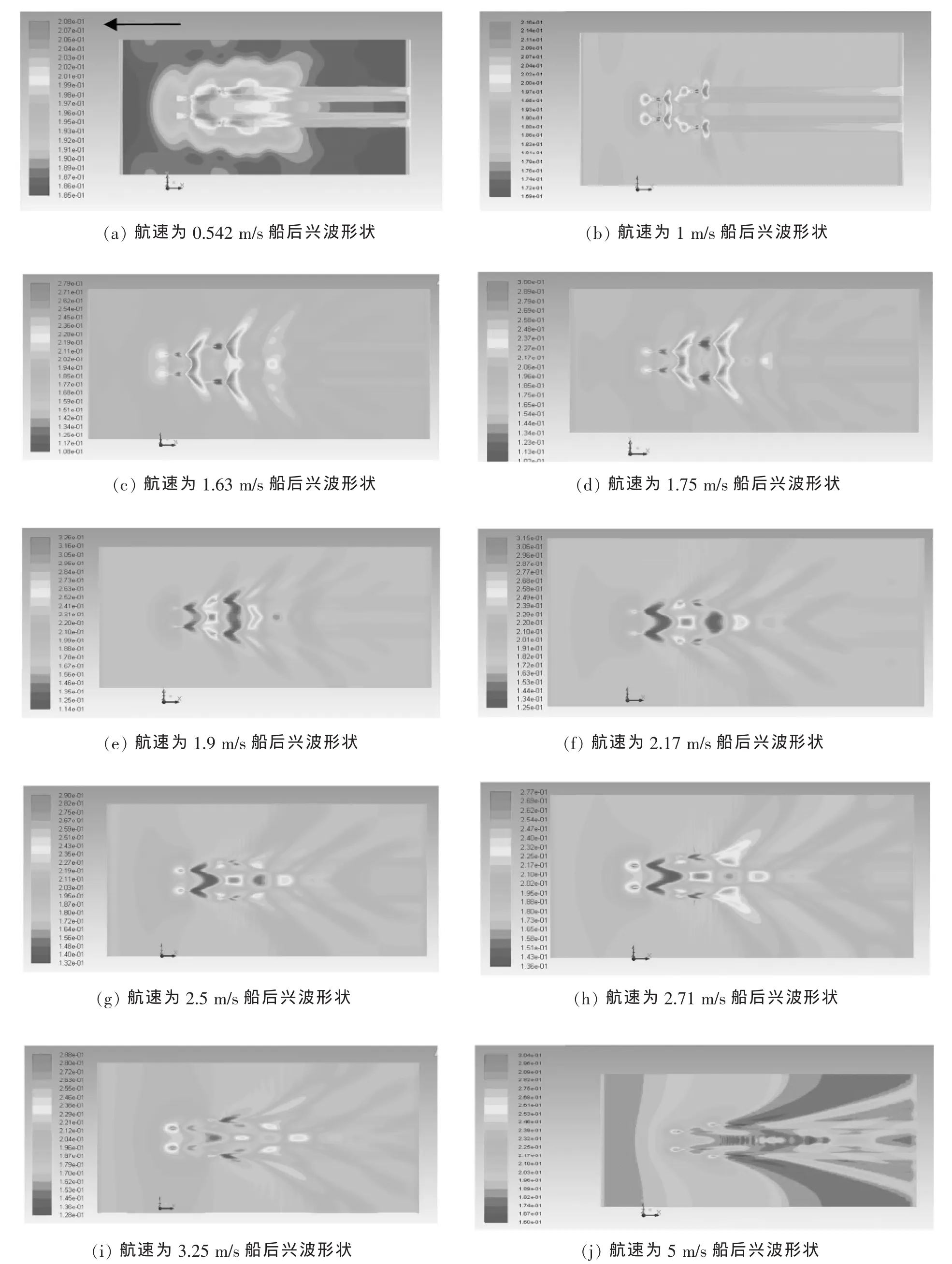
图11 FLUENT计算的四体船船后兴波形状
从图11中可以看出,随着航速增加,自由表面兴起的波浪也在不断改变,航速在1.63~2.17 m/s的范围内兴波较大。四体船前体和后体兴起的波浪相互叠加在一起,使得四体船后的自由面兴起的波浪波形变得非常复杂。在低航速时,四体船前体兴起的首个波峰和波谷相对靠前,而后体处于前体次波峰中,后体艏部及前体与后体之间兴起的波浪波面较高,但是此时兴起的波浪并没有产生有利干扰(见图11a)。随着航速增加,四体船前体首个波峰和波谷开始逐渐向后移动,其后体也开始进入前体兴起的波谷区域,此时其侧体兴起的波峰与主体产生的波谷相互叠加,抵消了一部分能量,所以在高航速下四体船兴起的波浪会产生有利的干扰,见图11(h)[10]。
3.3 计算值与实验值对比分析
表5为FLUENT计算值与文献中船模实验的总阻力系数的比较。
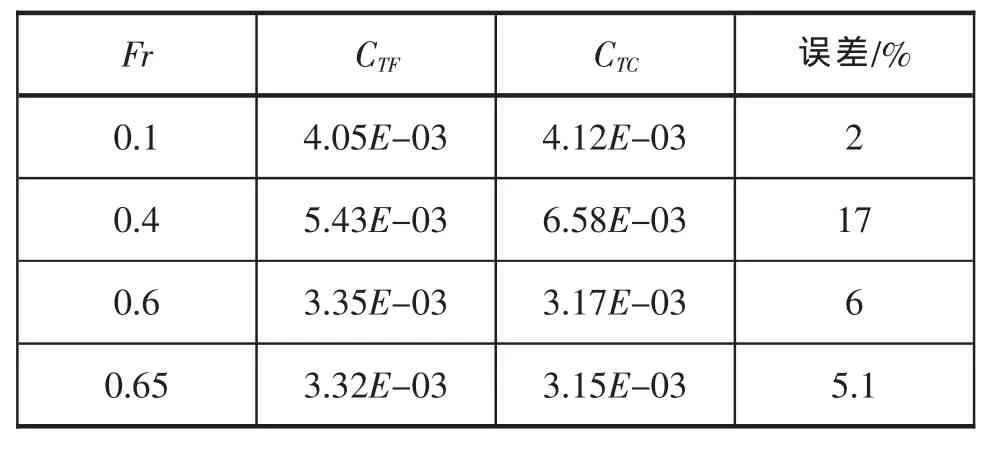
表5 四体船计算值与实验值比较数
表 5 中:CT=2R/(ρU2L2), 下标 F 为 FLUENT 计算值,下标C为文献中实验值。从表中可以得知:在低Fr数和高Fr数时,FLUENT计算的阻力系数和模型试验得到的阻力系数颇为吻合。总体而言,FLUENT计算结果与实验值吻合不错,说明了其计算结果的有效性。
4 结 论
(1)通过数值计算与双体船粘性阻力的经验公式对比,以及与四体船的实验值进行比较,可以证明本文的数值模型能够较有效地对多体船的阻力进行预报,同时计算的迭代过程具有相当高的收敛效率,通常迭代8 000步即可收敛;
(2)对于同一船型,随着航速增加,船体所受的总阻力增大;
(3)三体船的中体位置选取对三体船的整体兴波性能有很大影响。如果中体的位置选取不适当,相对双体船来说,并不能显著提升其兴波性能;
(4)对于四体船,随着航速的增加,其船后兴波更加复杂:在低航速时,船后兴波为不利干扰,增大到一定速度后,兴波变为有利干扰。
但由于试验条件限制,本文只是运用FLUENT对多体船的阻力进行初步研究,待日后应用船模试验再做相关深入研究。
[1]阮振华.高性能船舶发展与对策[J].船舶,2001,11(4):6-16.
[2]郑明.世界小水线面双体船图集[M].北京:中国船舶工业综合技术经济研究院.2002,(10):99-102.
[3]高慧颖.基于CFD的大型船舶球艏线型设计比较研究[D].哈尔滨工程大学硕士学位论文,2010.
[4]杨培青.近水面航行的潜艇阻力数值模拟[D].江苏科技大学硕士学位论文,2007.
[5]郭俊伟.小水线面三体船结构水动力分析[D].大连理工大学硕士学位论文,2007.
[6]张雨新.小攻角斜侧体三体船水动力性能数值模拟[D].哈尔滨工程大学硕士学位论文,2009.
[7]蔡新功.基于 Michell理论的多体船阻力计算[J].船舶,2007,18(2):5-10.
[8]朱东华.高速三体船结构设计问题[J].船舶,2010,21(2):30-33.
[9]方斌,高霄鹏,董祖舜.小水线面四体船的阻力特点分析[J].海军工程大学学报,2003,5(1):70-75.
[10]黄德波,张雨新,邓锐,等.单体与三体高速船舶粘性流场数值模拟[J]. 哈尔滨工程大学学报,2010,31(6):683-688.
