含弹性支撑的船用减速器箱体动态特性
2012-06-06周建星吴立言
周建星,刘 更,吴立言
(西北工业大学机电学院,710072 西安)
含弹性支撑的船用减速器箱体动态特性
周建星,刘 更,吴立言
(西北工业大学机电学院,710072 西安)
为分析弹性支承对船用减速器动态特性的影响,提高其动态性能,综合考虑齿轮时变啮合刚度、齿轮偏心误差及啮合误差等因素的影响,依据各零件作用力传递关系,建立传动系统动力学模型,计算系统动态激励.采用有限元法构建齿轮箱稳态动响应分析模型,应用弹簧单元对其底部支撑进行模拟,依据自编制动响应求解流程,对齿轮箱在系统动激励作用下的稳态响应进行求解,得到齿轮箱节点振动加速度响应时域历程及其频谱.引入齿轮箱隔振系统频率比概念,分析支撑刚度对齿轮箱振动传递及倾斜变形的影响,发现当频率比为2~3时可达到较好的支撑效果,为齿轮箱的设计提供了理论依据.
齿轮箱;行星传动;时变啮合刚度;振动;弹性支撑;动响应
齿轮传动装置是船用主动力装置的重要组成部分,具有传递功率大、用途特殊、结构复杂的特点,而且通过形式多样的传动装置可以创新出高效率的主动力推进系统[1].由于不可避免的齿轮啮合刚度波动及误差激励作用,使齿轮箱会产生振动[2],不仅影响传动系统稳定性,而且对其他电子设备造成干扰;因此,对齿轮箱动态特性的准确预估,就显得尤为重要.国内外学者对此也做出了大量研究[3-7].林腾蛟等[3]综合考虑齿轮系统中各项内部激励,对船用齿轮箱动态特性进行了分析,F.K.Choy 等[4]对齿轮箱模态及动响应进行了计算,并与实验结果做出了对比,发现仿真与实验结果具有很好的一致性.U Sellgren等[5-6]采用有限元法对齿轮箱动响应及噪声辐射做出分析,针对分析模型中不同的轴承连接形式对动响应的影响做出了分析,S A Mohamed[6]等采用声固耦合的方法对齿轮箱在时变刚度激励作用下的声辐射进行了分析;
由于齿轮箱结构及传动系统的复杂性,这些研究均做了过多的简化.本文综合考虑齿轮时变啮合刚度、误差等因素的影响,对系统动载荷进行求解.采用自主研发的动响应计算流程对齿轮箱稳态动响应进行了分析.
1 齿轮箱激励计算
1.1 分析模型简述
本文分析对象为功率分流式行星传动减速器,如图1所示.
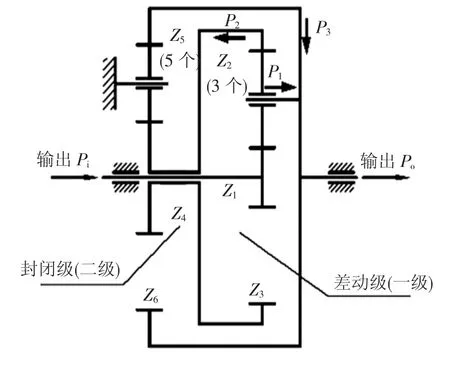
图1 功率分流式行星传动系统简图
系统由差动级轮系(太阳轮、3个行星轮、内齿环和行星架)和封闭级轮系(太阳轮、5个行星轮、内齿环和行星架)两级传动联结组成,其中封闭级行星传动的行星架是固定的.系统功率Pi由差动级太阳轮输入,分为两路,一路为P1传递于差动级行星架,另一路P2通过内齿圈传递于第二级,最终再与P1汇合输出.
1.2 系统动力学模型构建
减速器系统的主要激励源是轮齿啮合的动态激励,这种激励通过传动系统(齿轮体、轴和轴承)传给齿轮箱,使箱体振动,并辐射噪声[8].为合理地计算出传动系统激励及传递于箱体的动载荷,本文采用线性规划法对齿轮时变啮合刚度进行求解[9],并同时考虑各齿轮偏心误差(E,β)及各齿轮副啮合误差e的影响,采用动力学方法对系统动态激励进行求解.
齿轮系统动力学模型如图2所示,采用弹簧来代替各零件的支承刚度、扭转刚度及齿轮啮合刚度,取行星架中心为坐标原点.图中K为刚度,θ为转角,角标中r代表内齿圈,s代表太阳轮,p代表行星轮,c为行星架.系统广义坐标中X,Y为横向微位移;u为扭转微位移.
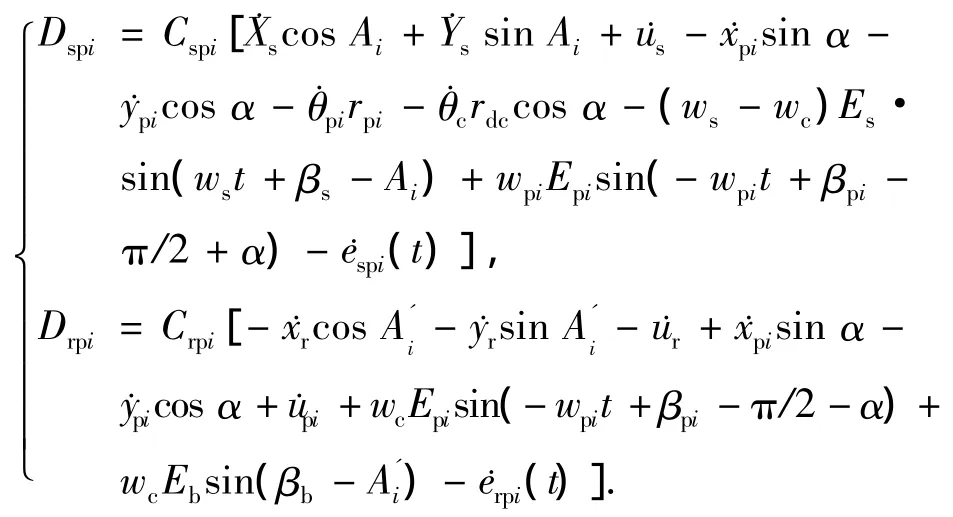
将系统中各零件误差及相对于理论位置所产生的微位移,转化为各个零件在弹簧作用方向上的“等价误差”,再将其以作用力的形式表示,则太阳轮与行星轮及行星轮与内齿圈的啮合力
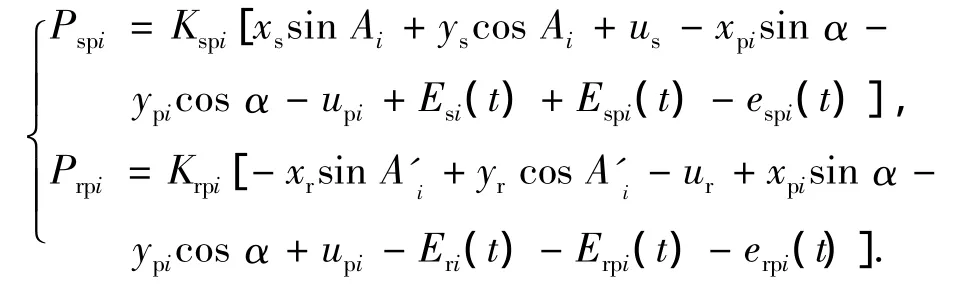
式中:
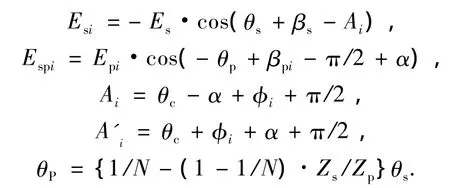
其中:α为啮合角;φi为行星轮的相位角,φi=2π(i-1)/3;N为系统传动比;θs为太阳轮转角;rpi为行星轮基圆半径.
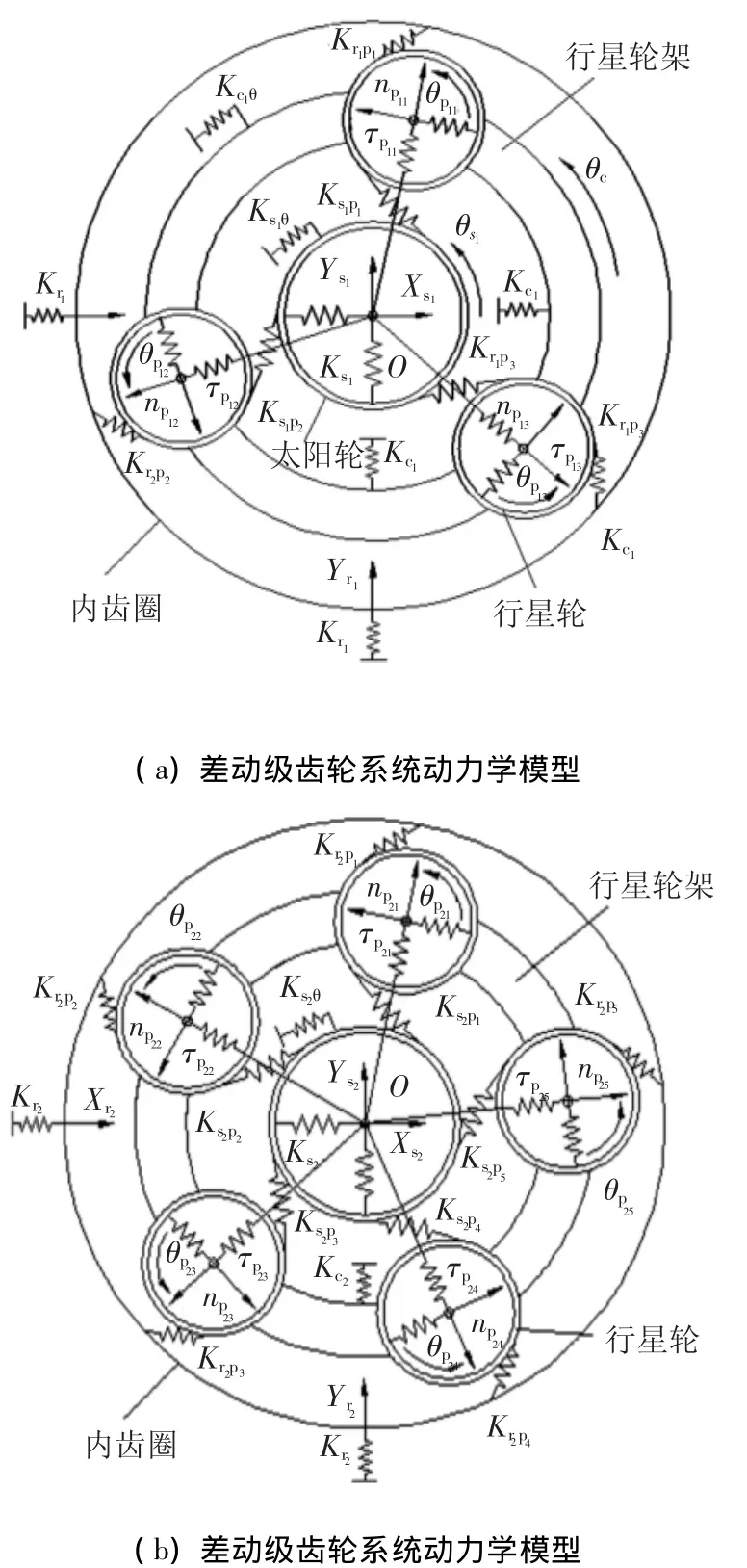
图2 齿轮系统动力学模型
太阳轮与行星轮及行星轮与内齿圈的啮合力阻尼力
齿轮副的啮合阻尼系数为[8]
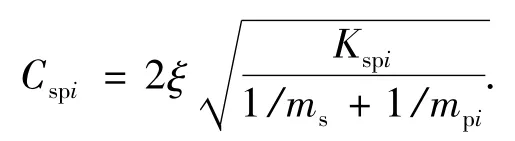
其中:ms为太阳轮质量;mpi为第i个行星轮质量;阻尼比ξ的取值范围为0.03~0.1,本文取为0.07;ws为太阳轮转速;wc为行星架转速;wpi为第i个行星轮转速;rdc为太阳轮与行星轮的中心距.
通过分析各个零件在理想位置的受力情况,可建立系统的数学模型

式中:Mg为齿轮系统等效质量阵;Cg为齿轮系统阻尼阵;Kg齿轮系统刚度阵;X为位移向量;Pg为广义力向量.
对齿轮箱轴承所承受的动载荷采用轴承转子系统动力学求解,其动力学模型如图3所示.差动级行星架连接于输出轴上,对差动级齿轮系统起到支撑作用;同时,齿轮系统动态激励由此传递至输出轴,故对于轴承转子系统行星架则是激励源.轴承转子系统模型为

式中:Mb为轴承转子系统质量阵;Cb为轴承转子系统阻尼阵;Kg轴承转子系统刚度阵;u为位移向量;Fb为广义力向量,且Fb=RTX;
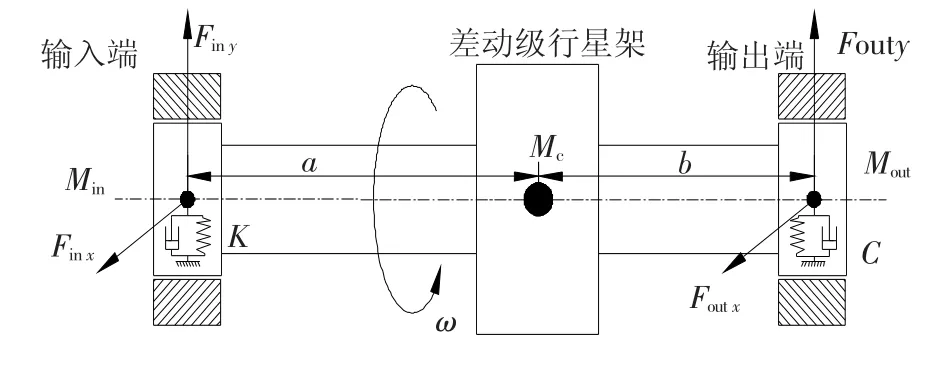
图3 轴承转子动力学模型
用统一的矩阵形式表示齿轮-转子耦合运动方程:

1.3 齿轮箱动态激励的求解
通过求解得到了齿轮箱输入输出端轴承动载荷及第二级行星轮动载荷如图4所示,其中图4(a)为输出端轴承动载荷由于差动级轮副的啮合频率为fs,行星轮的自转频率为fp=fs/z2=25.89 Hz,且差动级行星轮共有n=3个,故在轴承动载荷频谱中fp×n=77.67 Hz为主要频率成分.由于各齿轮质量较大,齿轮啮合的高频成分未传递于轴承动载中.图4(c)为第二级行星轮载荷,可以看到其主要频率成分为高频成分(频率为600 Hz),该载荷将直接作用于第二级行星架上.
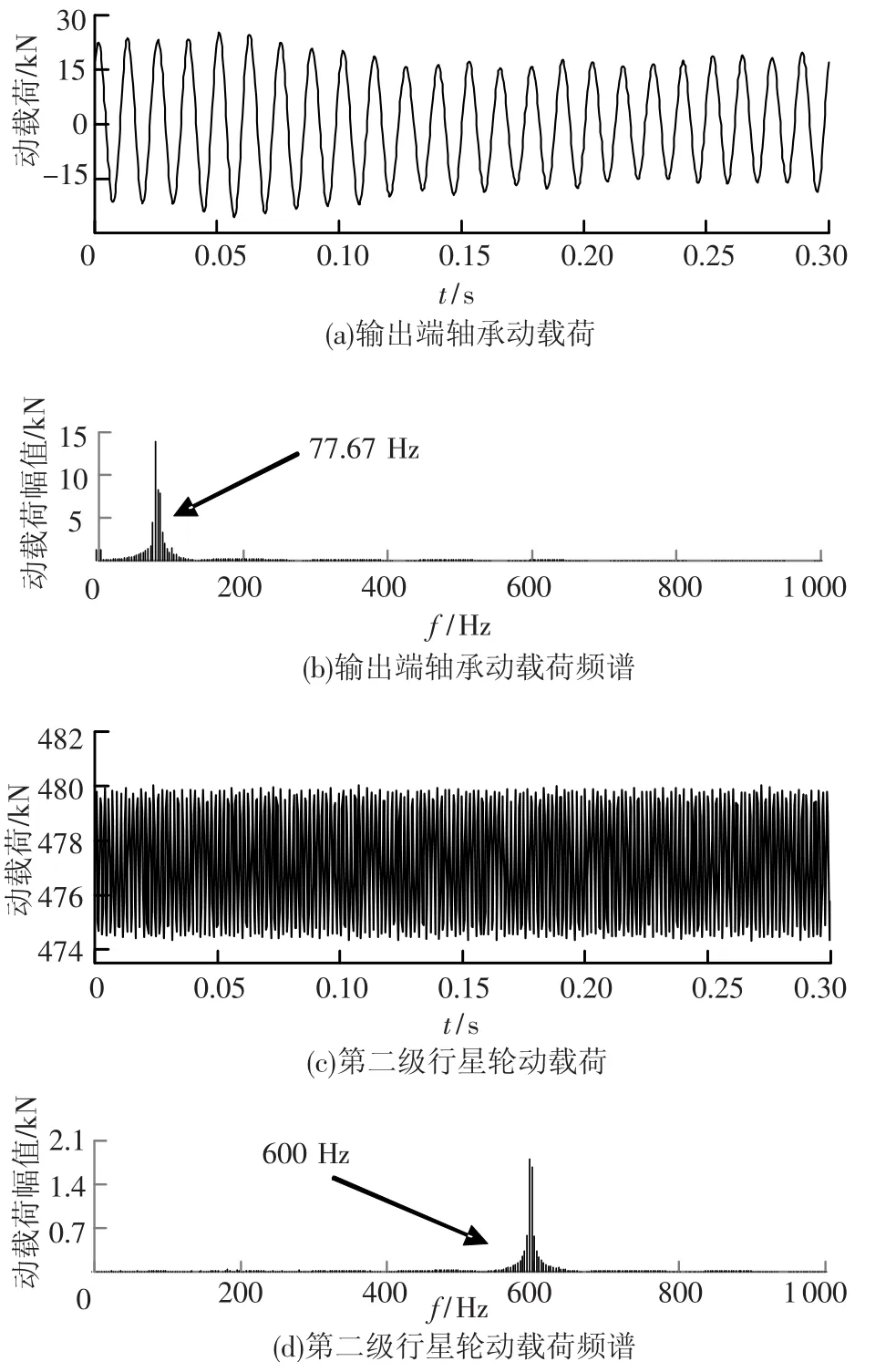
图4 系统动载荷
2 齿轮箱动态响应分析
2.1 齿轮箱有限元模型
采用ANSYS对齿轮箱模型进行网格划分,并定义其材料为合金钢,其参数为:弹性模量E=2.06×105MPa;材料密度ρ=7 900 kg/m3;泊松比υ=0.3.齿轮箱有限元模型如图5所示,其中网格42 032个节点,137 951个单元.为使加载方便,在输入输出轴承及行星架等加载位置建立中心节点,并使其与附近节点建立耦合关系.加载时将动载荷分别施加于各受载位置对应的中心节点上.为减小箱体与基础之间的振动传递,在箱体底部采用弹性支撑.对弹性支撑采用弹簧阻尼单元模拟,弹簧刚度即为隔振系统刚度.
2.2 动响应求解流程
齿轮箱动响应计算是以有限元软件ANSYS为平台,采用其二次开发语言APDL对求解流程进行控制,将系统动态激励离散成一系列冲击载荷,逐个求解其动响应.在求解若干周期后,对一个周期给定允差ε,当首尾两时刻,各个节点位移满足
表明结构已处于等幅振动阶段(即稳态响应状态),则迭代计算结束.否则应该增加求解时间,继续求解直到位移响应满足式(1)为止.
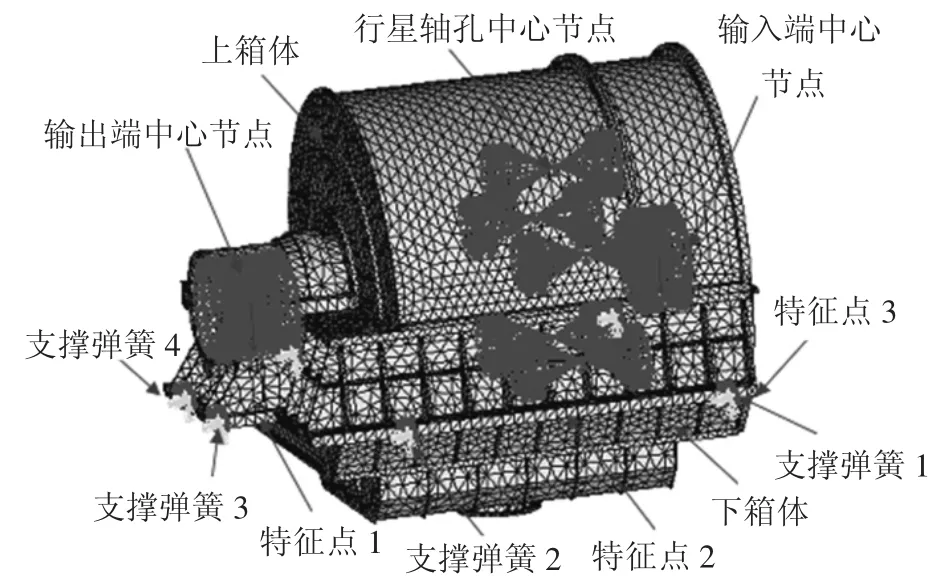
图5 齿轮箱有限元模型
2.3 箱体模态分析
采用Lanczos法对齿轮箱进行模态计算,齿轮箱固有频率如表1所示.
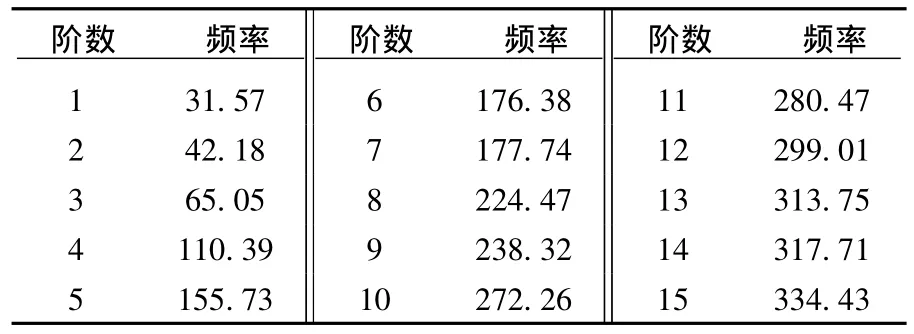
表1 模型固有频率
齿轮箱前四阶振型如图6所示.
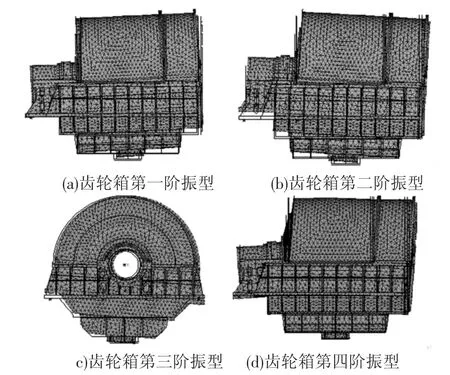
图6 齿轮箱振型
可以看到齿轮箱前三阶为整体模态,其中第一阶与第二阶振型为箱体前端与后端上下摆动,第三阶为箱体左右两侧摆动.其余皆为齿轮箱局部模态.需要注意的是动响应计算采用了模态叠加法,故在提取模态时,必须提取出可能对动态响应有贡献的所有模态,否则将会由于缺失模态而造成求解结果不准确.
2.4 动响应计算结果
在轴承位置及第二级行星架分别施加动载荷,通过求解得到齿轮箱结构动响应,特征点1、2、3振动加速度时域历程及其频谱如图7所示.
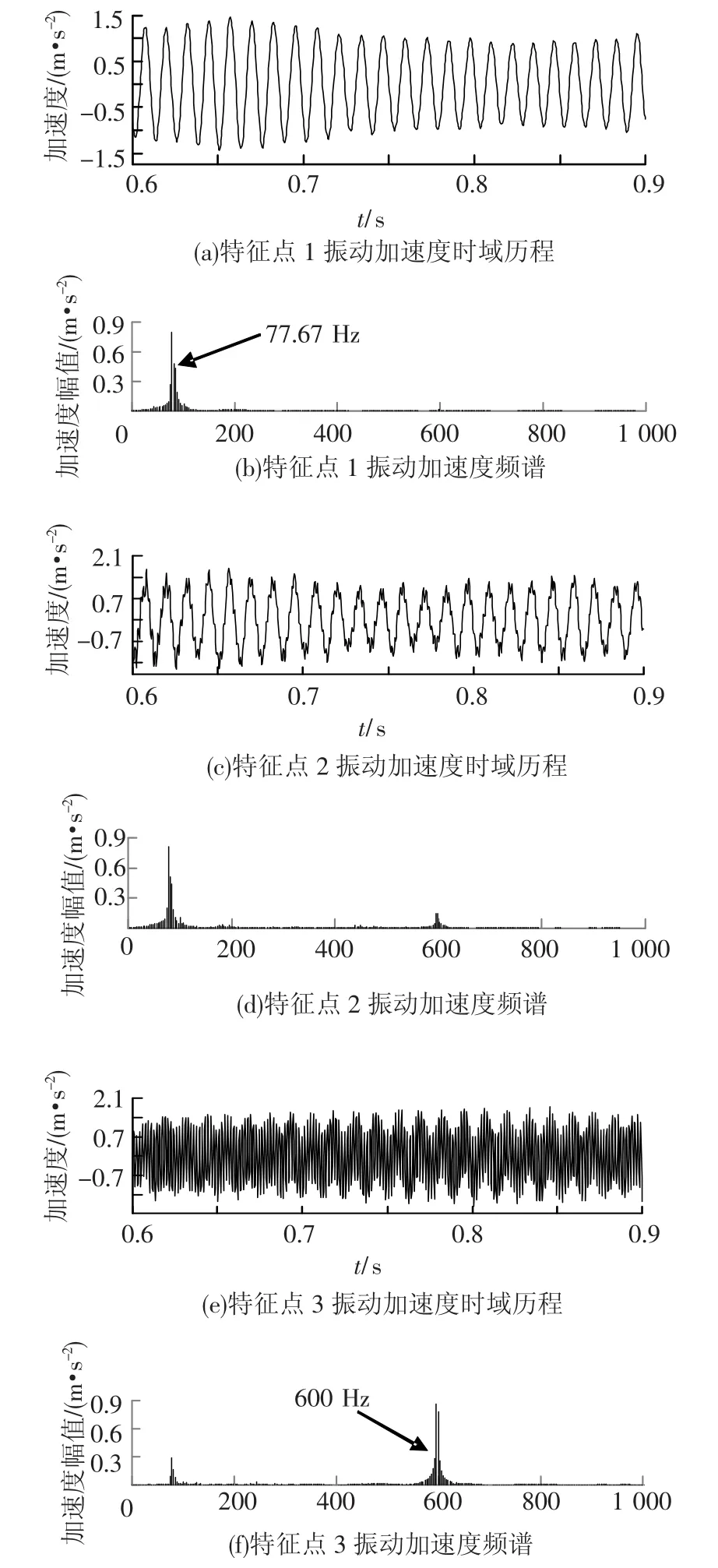
图7 特征点振动加速度响应
其中图7(a)为特征点1振动加速度时域历程,可以看到其加速度曲线波动较为平缓,由于距第二级行星架较远,高频激励对其影响不大,故高频成分并不明显,其频谱中仅在77.67 Hz位置产生了峰值.图7(c)为特征点2振动加速度时域历程,其曲线伴随有高频成分,并在频谱图中77.67 Hz及600 Hz位置均产生了峰值,但低频的峰值远高于高频峰值.图7(e)为特征点3振动加速度曲线,由于距第二级行星架较近,加速度曲线高频成分较为明显,频谱图中600 Hz位置的峰值已远大于77.67 Hz位置.随着特征点位置向第二级行星架靠近,高激励作用逐渐变得明显,在第二级附近的特征点振动加速度以高频成分为主,输入端附近的则以低频成分为主.
3 支撑刚度对箱体振动的影响
3.1 支撑刚度对齿轮箱变形与振动传动的影响
支撑刚度的大小不仅决定着齿轮箱的整体模态,并且对箱体振动的传递具有一定影响.在分析支撑刚度影响时,需要选取较大的刚度变化范围,不便于图表的直观表述,故可认为减速器与其弹性支撑构成一个单自由度振动系统,并定义系统频率比为ε=f/f0(即激励频率与系统固有之比,在计算时,如果同时存在几个频率不同的激励源,则激励频率应该取其中最小的为计算值[10]),则

式中:f为激励频率,由图4可以得到f=77.67 Hz;f0为隔振系统固有频率;m为减速器质量.
利用频率比与支撑刚度间的函数关系,可以得到支撑刚度为

由式(2)即可计算得到ε取不同值时箱体的支撑刚度.当ε趋近0时,可认为齿轮箱刚性连接于基础上.
通过动响应计算,得到各支撑刚度下支撑弹簧变形及作用力时域历程.为反映不同刚度下各支撑弹簧所传递的作用力波动的大小,采用式(3)计算了支撑弹簧所产生作用力标准方差.

支撑弹簧所产生的变形均值及作用力标准方差随频率比的变化如图8所示.

图8 作用力标准方差及变形与频率比的关系
可以看到:当f/f0<0.5时,即激励频率小于隔振系统频率并不在共振区时,各支撑弹簧作用力的标准方差变化不大,并与刚性支撑时的支撑反力相近;当0.5<f/f0<1.5时,即激励频率在系统共振区时,作用力的标准方差有所增加(均大于刚性支撑的支反力),并在f/f0=1时产生峰值,说明弹性支撑对系统的振动有放大作用,甚至会产生共振现象;当f/f0>1.5时,各支撑弹簧作用力的标准方差迅速减小,并随着f/f0的增大而减小.弹簧变形随频率比的增大单调增加.
3.2 支撑刚度对齿轮箱平稳性的影响
由于受重力分配不均及负载作用,使各支撑弹簧产生的变形不同,从而箱体会产生倾斜.为了解弹性支撑刚度对齿轮箱受载倾斜程度的影响,分别计算了各频率比下箱体轴向及横向变形落差.即
轴向落差1:Δδ1= δ1- δ3;
轴向落差2:Δδ2=δ6- δ4;
横向落差1:Δδ3= δ1- δ6;
横向落差2:Δδ4=δ2- δ5;
横向落差3:Δδ5= δ3- δ4.
其中,δ1、δ2、…、δ6分别为各支撑弹簧的变形.
图9所示的计算结果表明,随着频率比的增大,支撑刚度逐渐减小,齿轮箱轴向和横向偏斜均会增大,并且由于齿轮箱所承受的扭矩作用远大于重力的影响,故其横向落差受变化更为明显.
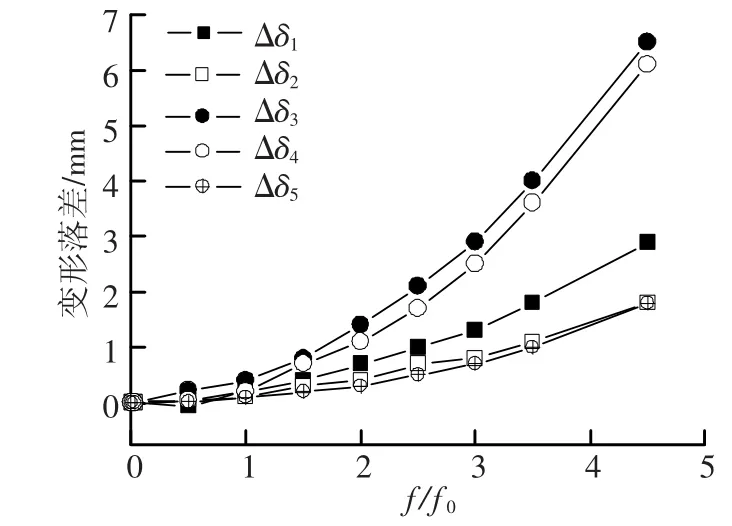
图9 落差与频率比的关系
4 结论
1)综合考虑齿轮时变啮合刚度及误差等因素的影响,采用齿轮-转子耦合的方法,建立了系统动力学模型,通过求解,得到了系统动载荷.
2)由于考虑了弹性支撑,故齿轮箱前三阶为整体模态,其他为局部模态.箱体节点动响应频率成分与其位置相关,第二级行星架附近节点振动以高频成分为主,输入端附近节点振动以低频为主.
3)弹性支撑刚度对齿轮箱的振动幅值、振动传递及倾斜变形均有一定影响,当系统频率比ε在2~3之间时可达到较好的支撑效果.
[1]王世安,田广,游克全,等.船用齿轮设计技术的发展趋势[J].热能动力工程,2003,18(6):547 -551.
[2]EBERSOBACH S,PENG Z,KESSISSOGLOU N J.The investigation of the condition and faults of a spur gearbox using vibration and wear debris analysis techniques[J].Wear,2006,260(1/2):16-24.
[3]林腾蛟,蒋仁科,李润方,等.船用齿轮箱动态响应及抗冲击性能数值仿真[J].振动与冲击,2007,12(26):14-17.
[4]CHOY F K,QAIN W.Vibration and noise analysis of a gear transmission system[R].California:National Aeronautics and Space Administration,1993.
[5]SELLGREN U,ÅKERBLOM M.A model-based design study of gearbox induced noise[C]//Proceedings of the International Design Conference.Dubrovnik:Inderscience Publishers,2004:1337-1342.
[6]ABBES M S,BOUAZIZ S.An acoustic-structural interaction modelling for the evaluation of a gearbox-radiated noise[J].Mechanical Sciences,2005,50(3):569-577.
[7]KATO M,INOUE K,SHIBATA K,et al.Evaluation of sound power radiated by a gearbox[C]//Proceedings of the International Gearing Conference.Newcastle:J N Fawcett,1994:69-74.
[8]李润方,王建军.齿轮系统动力学——振动、冲击、噪声[M].北京:科学出版社,1997:353-354.
[9]卜忠红,刘更,吴立言,等.斜齿轮啮合刚度变化规律研究[J].航空动力学报,2010.25(4):957-962.
[10]盛美萍,王敏庆,孙进才,等.噪声与振动控制技术基础[M].北京:科学出版社,2001:92-95.
Vibration analysis of marine planetary reducer with elastic support
ZHOU Jian-xing,LIU Geng,WU li-yan
(School of Mechatronics,Northwestern Polytechnical University 710072 Xi’an,China)
In order to analyze the dynamic effects of elastic support on dynamic characteristics of marine planetary reducer,the dynamic model of transmission system is set up in consideration of the time-varying mesh stiffness and gear error,and the dynamic excitations of the system are calculated.The dynamic response model of the gearbox is set up by using finite element method and solved by using mode superposition method.Then the time history and spectrum of node acceleration of the gearbox are obtained,and the effect of support stiffness on vibration transfer and displacement of the gearbox are researched.The study provides useful theoretical guideline to the design of the marine gearbox.
gearbox;planetary gear transmission;time-varying mesh stiffness;vibration;elastic support;dynamic response
TH113
A
0367-6234(2012)07-0097-05
2011-04-26.
周建星(1982—),男,博士研究生;
刘 更(1961—),男,教授,博士生导师.
刘 更,npuliug@mail.nwpu.edu.cn.
(编辑 杨 波)