基于梯度下降法的风力机特性模拟研究
2012-06-01韩肖清
韩肖清,董 升
(太原理工大学电气与动力工程学院,山西 太原 030024)
基于梯度下降法的风力机特性模拟研究
韩肖清,董 升
(太原理工大学电气与动力工程学院,山西 太原 030024)
建立了风力机运行特性的数学模型,在此基础上创建了风力机模拟系统。通过对比风力机与直流电动机模型的异同以及运行特性的相似性,提出基于BUCK斩波电路的直流电动机电流闭环控制系统的模型,并进行仿真分析。仿真结果表明,采用梯度下降法的自适应PI控制的风力机特性的模拟,比传统PI控制具有更高的精度及更快的响应速度,可方便应用于实验室环境下风力发电技术的研究。
风力发电;特性模拟;梯度下降法的自适应PI控制;BUCK电路
0 引言
风能是一种取之不尽、清洁无污染的“绿色能源”。近年来,风力发电技术得到飞速的发展,并得到广泛的应用[1]。为详细研究风力发电技术,将风力机与发电机直接连接,现场做试验是较理想的方法。但是国内多数实验室还没有风力机或风电场,因此,如何在实验室条件下模拟风力机特性,是深入研究风力发电技术的前提,具有重要的现实意义。目前,风力机模拟系统的相关研究逐渐增多,根据所采用电机的不同,可将风力机模拟系统分为直流电动机[1-5]、异步电动机[6-8]和永磁同步电动机[9]三类。文献[2]采用直流电动机来模拟风力机的转速-功率特性,但是仅仅局限于风速不变的情况,考虑到风的随机变化性,不能真实地反映风力机的输出特性。文献[6]采用异步电动机模拟风力机特性,但未考虑增速齿轮箱的影响,也未考虑随机风速下风力机输出特性。由于直流电动机是最成熟的调速电机,其励磁和电枢反应磁场物理上相互垂直,励磁和转矩参数自然实现解耦,控制简单,调速性能较好,故本文选用直流电动机作为原动机来模拟风力机,运用自适应PI控制法控制风力机特性的模拟,在Simulink环境下建立了含风速恒定和风速变化的仿真模型,验证了模拟系统的实际运行效果。
1 风力机的运行特性分析
根据空气动力学知识,风力机的输入功率用公式(1) 表示。

式中:ρ为空气密度,一般为1.225kg/m3;S为风力机叶片旋转面的面积,单位为m2;R为叶片半径,m;V为风速,m/s。
风力机的输出机械功率表示为

风能利用系数CP是桨叶吸收的机械能与通过桨叶旋转面的全部风能的比例[10],它与叶片转速、叶片半径、风速、桨叶节距角均有关系。因此,定义叶尖速比λ,即叶片尖端线速度与风速之比,为

风力机可分为变桨距和定桨距两种。变桨距风机特性可由一簇风能利用系数曲线表示。因此,风能利用系数CP是叶尖速比和桨叶节距角的函数,即CP(λ,β)。
根据数值近似计算的方法,得出CP的计算公式[1 1]为

图1为在一定风速下,桨距角β为00时,风能利用系数和叶尖速比关系曲线图。

图1 风能利用系数-叶尖速比曲线
由图1可知,当桨距角给定时,总有一个对应着最佳风能利用系数CP,max的最佳叶尖速比,使风力机吸收的风能最大。因此,当风速变化时,只需调节转速ω使最佳叶尖速比λ保持不变,即可获得最佳的风能利用系数CP,max。
2 直流电动机模拟风力机的运行机理
2.1 风力机模型的建立
风力机模拟系统应按照给定风轮的转矩、转速及风速的关系输出机械功率。因此,风力机模拟系统涉及转矩与转速关系和动态变化两方面的问题,对于风力机特性的模拟,关键在于使模拟系统输出的转矩与转速的关系符合风力机的运行特性。因此,本文在分析风力机运行原理基础上,建立了转矩系数-叶尖速比(CT-λ)曲线的风力机模型(见表1)。
定桨距运行时,设桨距角β为0°,此时

式中:CT(λ)为转矩系数。
本文建立了一个1 0次多项式函数模拟实测风力机CT-λ曲线,即

CT-λ曲线如图2所示。
2.2 直流电动机特性
计及摩擦阻力矩和粘滞摩擦阻力时,直流电动机的动态特性方程见公式(7)。

图2 风力机转矩系数CT-λ曲线

表1 风力机模型参数

式中:Ke、KT为直流电动机的电动势系数和转矩系数;ω为转子角速度;Ia为电枢电流;φ为励磁磁通;E为反电动势;U为电枢电压;Te为电磁转矩;TL为负载转矩;Tf为摩擦阻力矩;Bm为粘滞摩擦系数;Ra、La为电枢绕组的电阻和电感;J为直流电动机转动惯量。
稳态下直流电动机输出转矩的特性为


忽略电枢反应,假设磁通φ不变,说明Te与U、ω有关,即Te=f(U,ω)。当U不变时,Te与ω成线性关系,连续改变U时,可得一簇平行的直线。
稳态运行时直流电动机输出机械功率的特性为,带入式(8) 得

由此可见,通过调节电动机电枢电压U,可以使其输出机械功率和转速满足风力机系统的功率-转速关系。
2.3 基于梯度下降法的自适应PI控制
PI控制器根据给定值与实际输出值构成控制偏差e(t),从而针对控制偏差进行比例、积分调节,其连续形式为

式中Kp、Ki分别为比例系数和积分系数。
采用梯度下降的自适应P I控制法的结构图如图3所示。首先定义偏差函数e=i*-i,假设比例环节、积分环节的输出分别为y1、y2,整个控制器的输出为u,准则函数为

根据梯度下降法可知

式中:K={Kp1,Ki1}且 α≥0。

具体结构图如图3所示。
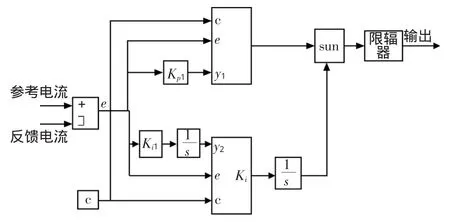
图3 梯度下降法自适应P I控制结构图
2.4 风力机的直流电动机模拟方案
风力机正确的模拟思路应是根据当前风速计算出风力机的输出功率或转矩,再根据最大风能捕获,确定相应的转速,并将它们作为直流电动机的控制指令加以执行,如图4所示。

图4 风力机特性模拟控制框图
直流电动机模拟风力机特性就是通过调节直流电动机的电枢电压,使直流电动机特性曲线与风力机特性曲线相交,进而可以连续地得到风力机特性曲线上的每一个点。
3 仿真实验
通过以上描述,在Simulink环境下实现基于直流电动机的风力机转矩特性模拟系统,首先根据风速和风力机转速及桨距角计算出风力机参考转矩;然后进行直流电动机的电流闭环控制,控制指令为转矩,控制变量是电流;再计算直流电动机的数学模型,求取转矩和转速的响应,控制输入。模拟风力机参数:额定功率3kW,最大风能系数为0.48,最佳叶尖速比为8.1001,叶片半径为4.3m,变速比N=8.72。
模拟系统的最终目的是能够使直流电动机的转矩-转速特性曲线,跟踪风力机的特性曲线。因此,本文采用以下三种方案进行风力机特性的模拟(仿真中电机参数:PK=3kW,nN=1220rpm,UN=240V,IN=23.5A,Ra=0.6Ω,Uf=240V,If=120H,J=0.2kg·m2,Tf=1.1N·m,Bm=0.004N·m·s,Rf=240Ω,La=0.0012H,Laf=1.8H)。
a)风速恒定的情况。图5为风速恒定条件的转矩-转速图。图中各实线表示风速分别为6m/s、7.5m/s、9m/s和10.5m/s情况下的风力机转矩-转速特性曲线。将该曲线与模拟系统模拟的特性曲线进行对比,可以看出,模拟效果良好,误差较小。
b)风速变化的情况。图6为风速变化时的转矩-转速图。图中风速从10.5m/s突变到9m/s,再从9m/s突变到7.5m/s,由图6看出风速变化时模拟转矩能较好地跟踪风力机输出转矩,但是有一定误差。

图5 定风速下模拟系统的转矩-转速曲线

图6 变风速下的转矩-转速特性曲线
c)基于梯度下降的自适应PI控制。图7分别表示采用梯度下降的自适应PI控制算法和仅仅采用PI控制算法时风力机模拟系统的输出特性曲线,结果显示,采用梯度下降的自适应PI控制算法时输出转矩能较好地跟踪风力机输出特性曲线。

图7 变风速下转矩跟踪曲线
4 结论
本文所采用的模拟方案简单、易行,转矩响应速度快,稳定性好,说明本文搭建的风力机模拟系统是可行的。基于直流电机的风力机模拟方法,可为在实验室环境下进一步地研究风力发电系统提供基础。
[1] 刘其辉,贺益康,卞松江.变速恒频风力发电机空载并网控制研究[J].中国电机工程学报,2004,24(3):6-11.
[2] 黄海,康勇,柳彬.风力机特性的直流电机模拟[J].电机电器技术,2005(2):50-51.
[3] Li Wei wei,Xu Dianguo,Zhang Wei,et al.Research on wind turbine emulation based on DC motor[C].2nd IEEE Conference on Industrial Electronics and Applications.Harbin,China:IEEE,2007:2589-2593.
[4] 卞松江,潘再平,贺益康.风力机特性的直流电机模拟[J].太阳能学报,2003,24(3):360-364.
[5] 马洪飞,张薇,李伟伟,等.基于直流电机的风力机模拟技术研究[J].太阳能学报,2007,28(11):1278-1283.
[6] 吴捷,许燕灏.基于异步电动机的风力机风轮动态模拟方法[J].华南理工大学学报(自然科学版),2006,33(6):46~49.
[7] 乔明,林飞,孙湖,等.基于异步电机的风力机模拟实验平台的研究[J].电气传动,2009,39(1):40-43.
[8] 陈彬,宋平岗,何鑫.基于直接转矩控制的风力机模拟器研究[J].防爆电机,2007,42(137):18-21.
[9] 贾要勤,曹秉刚,杨仲庆.风力机模拟平台的MPPT快速响应控制方法[J].太阳能学报,2004,25(3):364-370.
[10]倪受元.风力机的工作原理和气动力特性[J].太阳能,2000(3):12-16.
[11]P K Sinha.Electromagnetic suspension:Dynamics and control[J].IEE control engineering series,1986(30):52.
Simulation of the Characteristics of Wind Turbine Based on Gradient Descent
HAN Xiao-qing,DONG Sheng
(College of Electrical and Power Engineering,Taiyuan University of Technology,Taiyuan,Shanxi030024,China)
It realized the mathematic model for acquiring the operation characteristics of wind turbine,and based on this model,it established the simulation system of wind turbine.By contrasting the differences and similarities of wind turbine and the model of DC motor and the similarities of their operational characteristic,this paper put forward the model of current closed-loop control system based on BUCK chopper circuit.Simulation experiments were carried out,and the result indicated that wind turbine simulation by adopting gradient descent based adaptive PI control is more accurate and responses more quickly than that by the traditional PI control so that the former can be conveniently used in the study of wind power generation in laboratory.
wind power generation;characteristic simulation;gradient descent based adaptive PI control;BUCK circuit
TM310
A
1671-0320(2012)05-0001-04
2012-06-20,
2012-08-03
韩肖清(1964-),女,山西太原人,1985年毕业于太原工业大学电力系统专业,教授,博士生导师,主要研究方向为电力系统运行与控制、新能源技术;
董 升(1987-),男,2012届太原理工大学电力系统及其自动化专业,硕士,研究方向为风力发电控制技术。