大型DCS设备中上位机通信误差消除方法
2012-06-01夏辉
夏 辉
(宁波市化工研究设计院设计3室,浙江宁波 315040)
随着化工产业的发展,在某些场合,大型DCS设备已经应用到相关领域,发挥着不可替代的作用。利用大型分布式控制系统DCS对化工、发电、核电等相关产业进行控制成为自动化控制领域的热点,DCS设备通过长期的高精度设计,对较为复杂的各行业工作流程进行相关的控制,代替人力完成相关功能。凭借强大的处理能力,得到了众多化工、电力、水利等相关部门的重视,其应用广泛,因此受到了诸多专家的关注。
但在大型DCS的工作过程中,面临一个问题,就是为了协调完成任务,上位机与底层的控制器之间需要密集的、时间随机的通信。通过采集底层的控制信号,完成相应的监控和控制的工作,一旦DCS设备较为复杂,底层控制器较多,传统的CS机构控制器将受到一定限制,最主要的是可能在时域内引发冲突,一旦上下通信冲突加剧,将大幅降低上下级通信效果,造成通信正确率下降。影响整个DCS控制系统的状态[1-2]。因此,如何协调大型 DCS设备中,上位机与控制器之间的通信,成为设计中的一个难点问题。
1 传统DCS通信方法的原理及缺陷
1.1 DCS通信原理
以下将通过网络物理层连接、通讯设置、数据处理和画面显示4个方面阐述如何实现通讯的过程[3-4]。
在DCS上位机与控制器通信系统中,上位机与控制器之间通过DP总线进行传感器信号发送,这种发送信息中带有命令特征的,服务器的接口带有识别指令的功能,完成任务中的通信,以便于更好地协同工作。大型DCS的通信原理如图1所示。
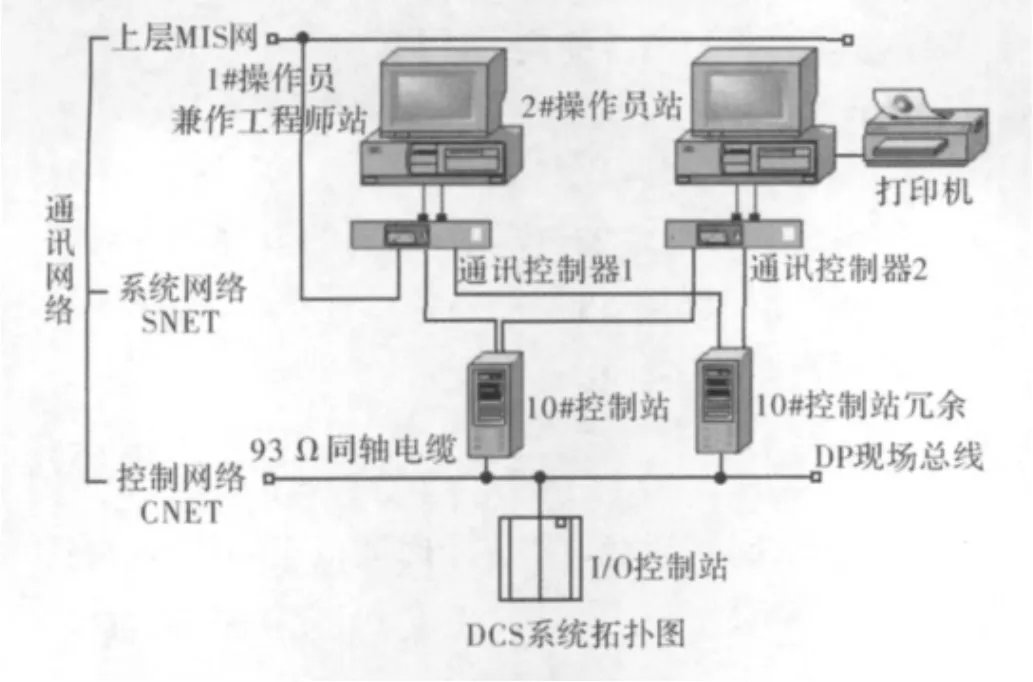
图1 DCS通信原理
(1)物理层连接:和利时集团Smartpro DCS系统的控制层网络传送数据是通过DP协议完成,为了与DCS实现最可靠的通讯,在风机控制的AB的PLC硬件中配置了一块支持DP协议的通讯接口卡,文中用DP电缆将PLC的通讯卡与和利时现场控制柜卡件底板的DP端子连接,实现两个系统控制器之间数据通讯,再通过光缆将信号送入中控室操作站,即完成了网路物理层的连接。
(2)通讯设置:在Smartpro DCS系统中,所有的硬件模块的配置均有一个相应的 GSD文件,因此在DCS,要将AB的通讯模块SST-PFB-CLX的GSD文件拷贝到TARGETHollySys PCBasedIO目录下,然后在硬件配置处直接添加SST-PFB-CLXFENGJI(DP_Slave),在硬件属性中设置从站的站号和名称以及通讯参数。根据所需要通讯的变量数目,双方协商设定通讯区的大小。在通讯程序中,共有62个通讯变量,其中模拟量输入21点,模拟量输出4点,数字量输入37点。一个模拟量点占一个Word,而一个数字量点占一个Word的一位,所以在DCS方,通讯区长度设定了2个16 Word In和1个12 Word Out。在AB的PLC方,创建一个网络配置,设置网络参数,波特率和站号,初始化通讯参数。在RSLOGIX5K中设置SST-PFBCLX模块属性,指定一个通讯区,主站侧的输入模块对应从站侧的输出模块,所以设定了2个16 Word Out和1个12 Word In。在RSLOG IX5K的Main Program中添加程序Profibus-config(通讯初始化程序)和TX-con fig(读写和处理通讯变量程序),将需要发送给DCS的变量从内部缓冲区中拷贝到该通讯区的输出区中,并从该通讯区的输入区中读取DCS发送的数据,并将之拷贝到自身的内部缓冲区中,然后下装给PLC。
(3)数据处理:通讯设置完成后,在ConMaker中定义输入物理点变量和输出物理点变量,并将其参与组态程序中的逻辑运算,开始在程序中编写如何处理读取和写入的数据。文中在程序中编写了4个自定义功能块:IN_BOOL功能是读由PLC传来开关量,通过一位位分解,输出为16个开关量。OUT_BOOL功能是将16个开关量组合成一个PLC能识别的数据,然后输出。IN_REAL功能是读由PLC传来模拟量,此时读取的模拟量与DCS系统模拟量的格式不同,需要首先进行数据高低位交换,为使读入的模拟量有一位小数,所以将模拟量数据在PLC方乘10,因此在DCS上再除以10,再输出。OUT_REAL功能是先将数据乘以10,然后进行数据高低位交换,再把数据送到PLC。在资源中定义好需要通讯62个全局变量,添加调用功能块实现数据读写的程序,COM_PRG1 COM_PRG2 COM_PRG3,分别实现将通讯变量模拟量输入输出,数字量输入的读入和写出,随后保存编译、下装、登录与风机连接的转化13#站控制器,可看到通讯成功后读取和写入的数据。
(4)监控画面显示:在上位的FacView中,先将风机通讯中读写的变量添加到标签变量和趋势变量及报警变量表中,在FacView Explor的图形编辑器中制作风机监控画面,将画面编译运行后,下位控制器中读写的通讯变量就可在上位的风机流程画面上显示数据,因此在中控室就可监控风机的运行状态。
1.2 传统分配方式缺陷
当前随着工业控制规模的增大,一些大型的通信DCS设备得到广泛应用。需要的点数也越来越多,会经常出现大量的服务点竞争通信资源的状况,一旦DCS的信道容量系数η相对固定,并且要求通信的数据量I增加,将造成信道容量η的饱和。传统方式在计算短时间内瞬时出现的通信高峰,有效通信需求增加,在信道饱和的情况下,通信的效率将大幅下降,影响通信效果。
2 DCS防冲突算法实现
2.1 预测指令冲突
在大型DCS进行上下通信中,每个端口都有一个指令接收器,上面带有计数功能,初始值为0,接收端的计数器值从0开始,信号接收端采集底层传感器的请求,发送相关的指令到指令读写器。指令读写器第一次发送请求,所有指令的计数器初始值均是0,当底层的控制器进行信号读取时,可以有效检测到底层信号,这信号可得到一个有效的回馈,如果回馈的信息有冲突特征,那么应避免新指令的发送,此时,服务器中的计数器将开启,在冲突计数位加1,并加到计数器上,如果在底层采集到的信号反馈到服务器中,得到的信息无任何冲突特征,那么计数器不变,这样会保持前一个冲突的相关信息,假设前一个信息得到解决,计数器清0,计数方法如图2所示。
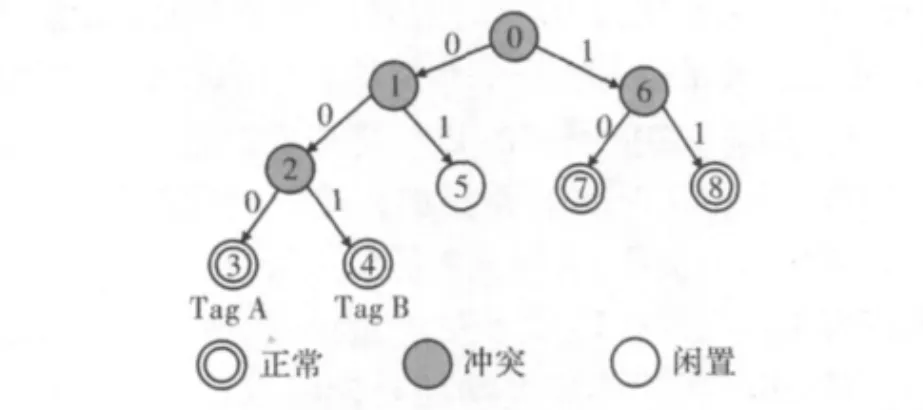
图2 指令冲突预测
2.2 防止底层指令冲突
根据时间间隔冲突计算方法能够对DCS上位机与终端内的通信冲突进行检测,有效的消除通信中的误差。设置上位机与下位机之间进行信号通信的时间是Q,完成全部通信指定信号的间隔是q,Uq是DCS的有效通信效率,DCS设备通信数目是p。在DCS的设备通信调度过程中,需要利用下式计算z个通信信号在DCS的上下端通信中计算可执行概率

通过以上方法计算DCS通信过程中的冲突可能性。计算通信效率

计算式(2)的极大值,这个极大值在DSC通信中有着特殊含义,其可以进行调整,使DCS的通信效率最大化。对每个等待的DCS通信任务进行合理的调度,可计算出在时刻t进行等待的通信任务的有效数量

对式(3)进行离散变换,可得到

如果在DCS通信的过程中,不同的调度任务均需要在时间t进行通信,可以计算在这种状态下,DCS通信的冲突概率

通过式(6)可以获取第k个时间段中的情景数目

计算DCS通信中,等待任务的有效数量

也可进行一定程度的简化处理,保证通信的稳定性

通过上述方法能够有效地调节DCS通信中上下层的冲突。
3 仿真实验与结果分析
为了验证文中方法的通信效果,采用和利时集团的火力DCS设备进行系统仿真实验,构造信息堆积、信道饱和的容易冲突环境。传统的DCS设备通信方法,只能按照节点位置分配节点流量,无法避免由于海量突变性通信需求造成的通信资源分配失衡的缺陷,导致节点信道资源分配效率降低。为验证该算法的有效性,需要进行一次实验。对火力的DCS通信设施进行计算机模拟通信,通信的原理如图3所示。
分别利用传统算法和文中提出的动态优先比例算法进行资源分配优化处理。其中参数设置如下t=200,aj=45,bj=38,对每次移动通信资源比例分配优化处理的效率结果μ进行标定统计,统计5次不同需求下的具体实验结果如图4所示。
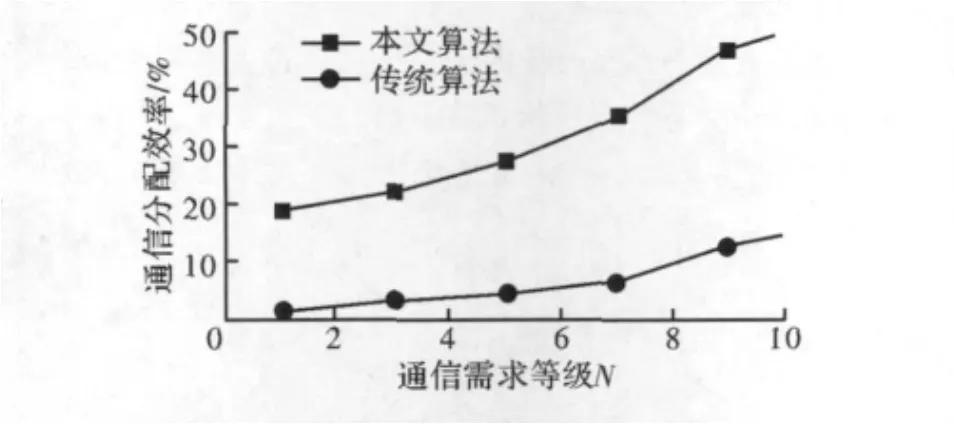
图4 通信效率对比折线图
在图4中,利用文中算法进行DCS的通讯远高于传统算法,表示在大型设备的通信过程中,文中算法体现出了一定的优越性。对实验中的相关数据进行记录,能得到表1和表2。其中,表1是大型DCS设备通信需求正常的情况下,进行通信资源分配的相关参数,表2是大型DCS设备通信较多数据情况下,进行移动通信资源分配的相关参数。

表1 大型DCS设备通信情况
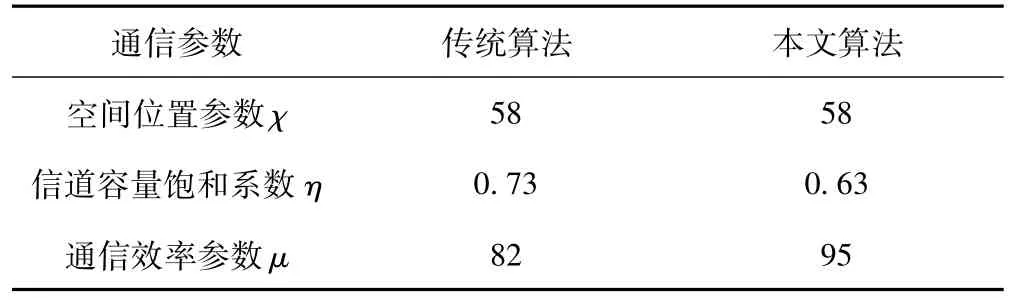
表2 海量数据DCS数据通信清零
通过对表1中的数据进行有效的诊断和分析能得出,在通信数据较多的情况下,文中方法得到的通信效率更高,这主要是因为该方法能够在冲突的情况下,进行合理的调度,最大程度地避免冲突的发生,实验表明,利用文中算法进行DCS设备通信的效率高于传统的DCS设备通信算法。
4 结束语
文中提出一种大型DCS设备中上位机通信误差消除方法,算法利用一种时间空闲间隔的有效填充方法,利用信号间的通信机制,解决上位机与控制器之间时域信号冲突。利用信号预测检测技术,提前对下个时隙进行调整,减少冲突的可能性。解决时域内的信号冲突问题。实验结果表明,此方法在DCS系统较大的情况下,能够较好地协调上位机与控制终端之间的联系,提高了多机器人的通信成功率。
[1]张冰,陈万米,梁亮,等.基于OpenGL的小型组机器人足球仿真平台设计[J].系统仿真学报,2008,20(3):724 -728.
[2]秦丰林,李晓明,汪嵩杰.面向足球机器人比赛的开放式仿真系统的研究[J].机电工程,2009(12):62-64.
[3]穆志纯,郭文杰.人耳人脸特征融合在身份鉴别中的研究[J].计算机科学,2009,36(5):251 -253,261.
[4]孙鹏,陈小平.RoboCup小型机器人仿真系统[J].计算机仿真,2006,23(4):128 -131.
[5]STANCLIFF S,BALASUBRAMANIAN R,BALCH T,et al.CMU hammerheads 2001 team description [J].Lecture Notes in Computer Science,2002(3):631 -634.
[6]MENG Qingchun,YIN Bo,XIONG Jiaoshe.Intelligent leaming technique based-on fuzzy logic for multi-robot path planning [J].Journal of Harbin Institute of Technology,2001,8(3):222-227.
