过顶跟踪技术在动中通中的应用
2012-05-21任娟中国电子科技集团公司第五十四研究所
+ 任娟 (中国电子科技集团公司第五十四研究所)
随着卫星通信技术和自动跟踪技术的不断发展,在运动中实现通信和数据交换变得越来越普遍。而且随着Ka、Ku频段的应用,卫星接收设备体积减小,动中通得以大量应用。动中通卫星通信系统具有通信距离远、通信质量可靠、通信迅速和受环境影响小等特点。近年来,动中通技术越来越多地应用于车载、船载和机载卫星通信系统中。动中通的关键技术是快速、稳定、可靠的伺服控制系统,它保证了天线时时对准卫星,实现了卫星通信不间断。对于需要工作在赤道附近的动中通,过顶跟踪技术保证了卫星通信无盲区。下文将就某车载动中通的设计说明过顶跟踪技术的实现。
1.系统组成
车载动中通系统由于车辆在运动中颠簸最厉害,因而对伺服系统的要求最为苛刻,而且天线口径不能太大。某Ku频段1.2m车载动中通主要由天馈分系统、跟踪接收机分系统、伺服控制分系统、座架分系统和卫星通信分系统组成,如图1所示。
天馈分系统完成对星通信,采用赋型环焦天线、主副面设计、小型化及轻型的波纹喇叭和宽频带差模跟踪网络,具有高效率、低旁瓣、低交叉极化隔离度和重量轻等优点。
除了收发图象、语音和数据等信号外,天线接收到来自卫星上的信标信号,经天线主副面反射后,进入波纹喇叭,再经过和差网络送到跟踪接收机解调出方位和俯仰的角误差信号,最后送到伺服控制系统,从而实现天线对卫星的单脉冲自跟踪。
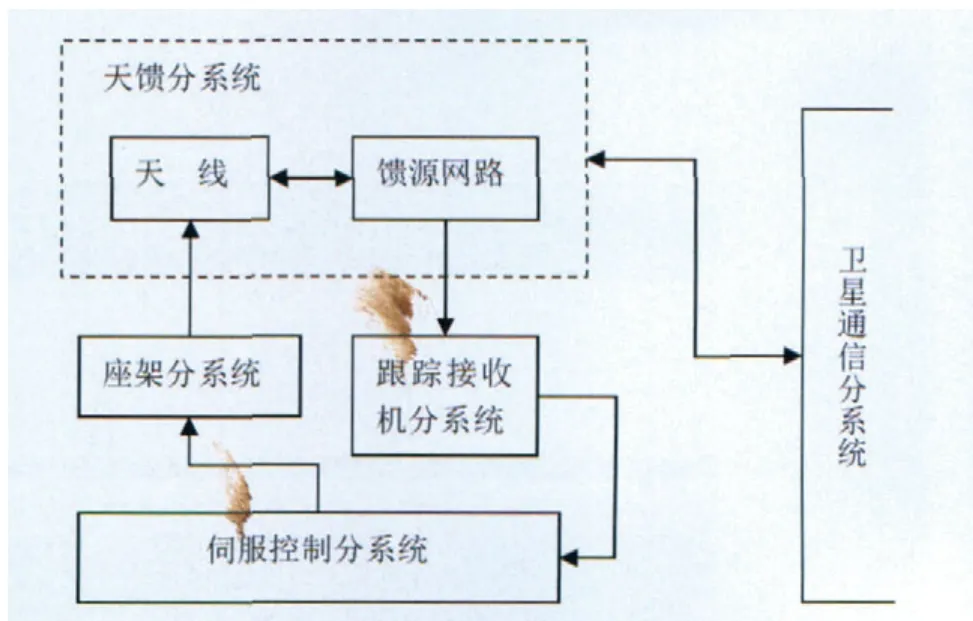
图1 动中通卫星通信系统组成
座架系统实现天线的转动,一般动中通的座架主要采用A-E两轴形式,即方位、俯仰轴,其结构紧凑,旋转关节少,刚度强,伺服控制系统也容易实现,但其缺点是高仰角跟踪有盲区,对于那些赤道附近的国家和地区,为实现高仰角甚至过顶跟踪,需要在两轴基础上增加交叉轴,采用A-E-C三轴座架,这增加了系统的设计和调试的难度。本系统采用三轴形式,组成三轴稳定两轴跟踪系统,实现过顶跟踪无盲区的要求。
2.伺服控制
随着数字信号处理技术的迅猛发展,伺服控制由原来的模拟控制转换成了先进的数字控制方式。本系统伺服控制分为舱内和舱外两部分,组成框图如图2所示:
惯导设备提供航向、横摇、纵摇数据,GPS提供经纬度信息,并通过串口把信息送入天线控制单元进行目标角的计算。
座架上安装了滑环装置使方位轴能够连续转动,保证卫星信号不间断。
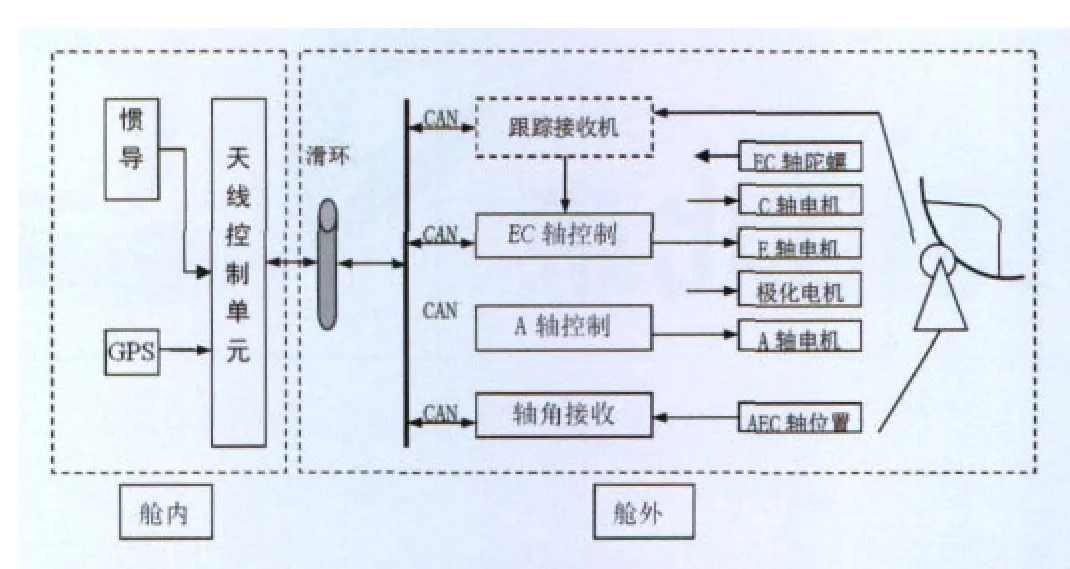
图2 伺服控制分系统
各轴控制和角度的解析分别由不同的单片机实现,并通过CAN总线和天线控制单元通信,跟踪接收机的和差信号也由CAN 总线送到伺服控制系统中。
由于受天线所在地理位置与卫星下行点经纬度差和地球曲率影响,卫星转发器辐射波的极化相对于卫星通信天线的极化有一定的夹角,即极化偏转角,通过对极化电机的控制来调整极化角度,以便与卫星在不同地区的极化取向匹配。
伺服跟踪的目的是使天线方位、俯仰时刻保持在目标角上,如果惯导达到一定精度,可以用图3所示环路实现。但车载惯导一般飘移很大,所以方位、俯仰跟上目标后,需要利用接收机和差信号,转入单脉冲跟踪,使天线时时对准卫星。
三轴座架系统结构复杂,对伺服控制系统提出了更高的要求。只跟踪不加稳定天线在车体的摇摆下很容易丢星。本系统采用反馈陀螺来隔离车体姿态,即当进入跟踪时,方位控制保持闭合位置环随动航向,俯仰和交叉用反馈陀螺信号先隔离车体摇摆,再用单脉冲跟踪来修正剩余的跟踪误差,如图4所示。
这样,采用三轴座架系统和三轴跟踪两轴稳定的跟踪方式,在高仰角和过顶跟踪时,交叉轴补偿了方位上的偏差,方位轴不需极速转动,防止了卫星通信的中断。
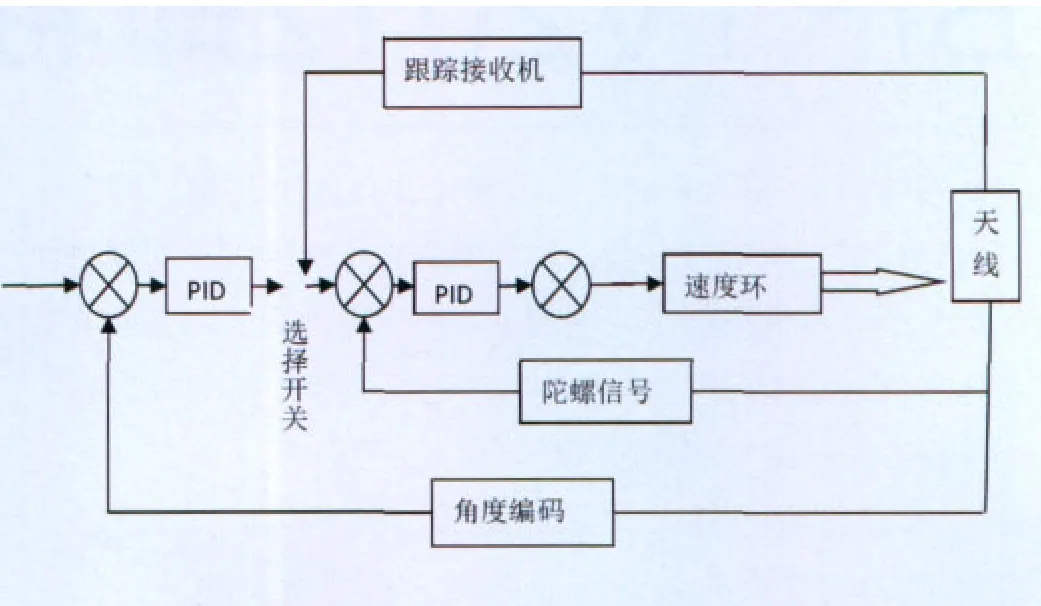
图1 伺服跟踪环路2
通过多项环境实验和大量跑车试验表明,本系统伺服控制具有优越的驱动性、快速的系统相应能力,可靠的稳定性能和很高的跟踪精度,达到了设计要求,满足在不同路况条件下准确跟踪目标卫星的使用条件。目前该动中通已出口到赤道国家,长期在俯仰角70°以上工作,通信效果良好。
[1]吴凤高.天线座结构设计[M].西安:西北电讯工程学院出版社,1986
[2]马宁.“动中通”常用跟踪方式,测控与通信,2008年01期,43-46
[3]李建荣.X-Y型天线座过顶跟踪分析,通信与信息技术,2010年11期,21-23
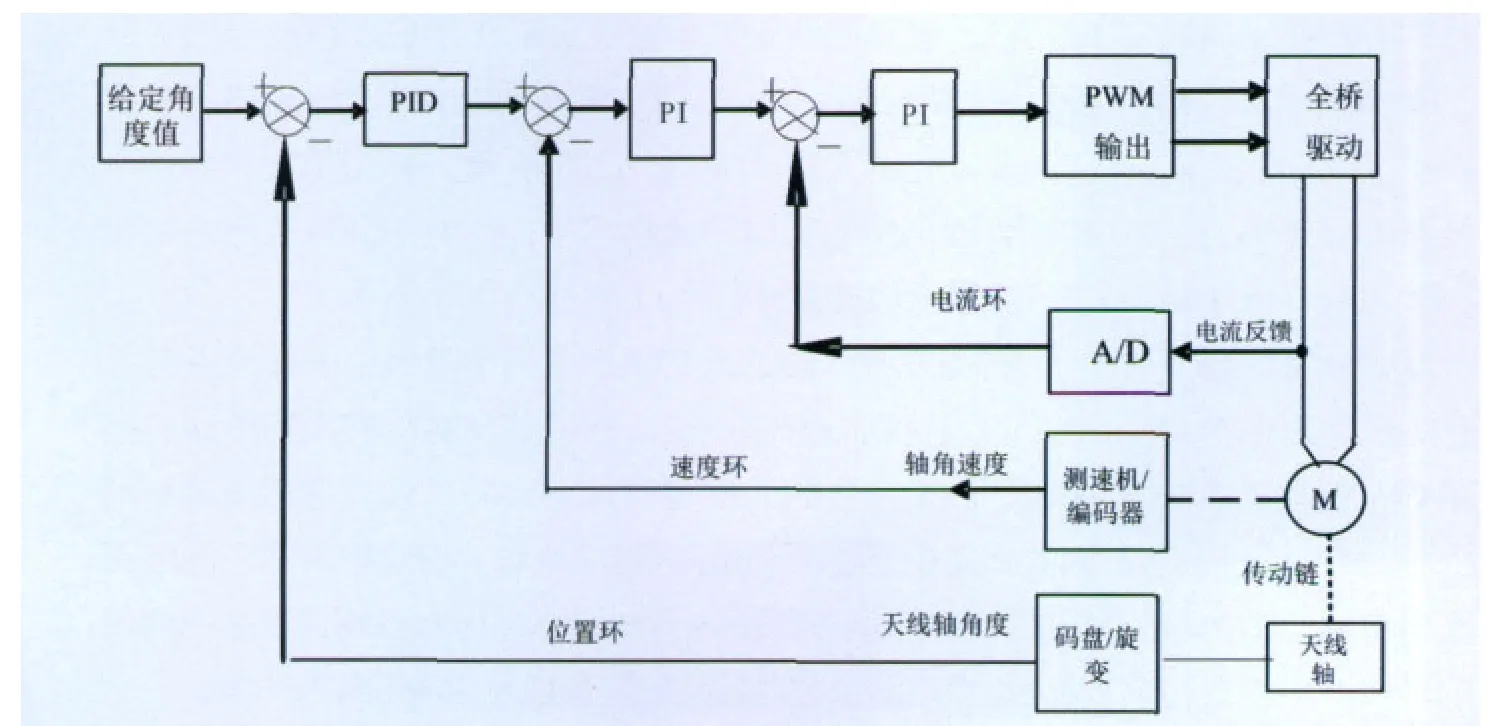
图3 伺服跟踪环路1
