基于磁强计的消磁电流控制仪研制
2012-05-09常宝林渐开旺张松勇
常宝林,渐开旺,张松勇
(上海海事大学航运技术与控制工程交通行业重点实验室,上海 201306)
0 引言
为预防磁性武器攻击和磁性探测,提高舰船的生命力,在舰船上安装消磁系统成为舰船磁性防护的最有效方法.[1]在航行过程中,由于舰船的感应磁性与作用在舰船上的地磁场成正比,所以采用测地磁消舰磁工作原理的消磁系统.为保证消磁装置供电的连续性,要求消磁线圈的电流能够根据舰船磁场随航向、纬度及摇摆状态的变化进行调整,得到有效补偿,因而发展出消磁电流控制仪.[2]
世界各国舰船消磁控制设备种类繁多,但从如何得到舰船坐标系下舰船磁场分量的角度主要可以分为3类:(1)查阅地磁图法.美英海军曾采用此法作为钢铁舰船消磁控制设备的标准控制方式.查阅不同地区的地磁场参数并列表备查,当舰船航行到某区域时,根据当地地磁场数据和舰船的航向实现半自动消磁电流控制.使用此法的设备性能可靠,但不能实现全自动控制.(2)磁场传感器法.利用安装在舰船桅杆的磁强计直接检测作用在舰船上的地磁场.该法可实现消磁电流自动控制,但在钢铁舰船上的抗干扰问题难以解决.所以,美国海军只在非磁性船壳的舰船上安装此类设备.(3)地磁解算法.根据舰船所在的位置,利用“地磁模式组”数学方法计算当地地球磁场.根据舰船的航向和姿态计算投影到舰船坐标系上的地磁分量,实施对消磁系统电流的全自动控制.这类设备能实现全自动调整,且不需要抗干扰调整.但是,它不能对局部异常地磁区域和变化的地磁场作出反应.[3-6]
本文所设计的基于磁强计的消磁电流控制仪通过磁强计实时检测磁场值,并采用计算机数据解算,自动实现抗干扰调整,排除干扰磁场对控制信号的影响,调整供给消磁绕组的消磁电流,使消磁绕组产生与舰船感应磁场形状相同、大小相等、方向相反的磁场进行补偿.
1 消磁电流控制仪的基本工作原理
基本工作原理是测地磁消舰磁.利用安装于舰船上与舰船三轴方向平行的磁强计(三分量磁通门测磁探头),测量舰船所处位置的磁场值(含地球磁场和舰船磁场),并进行A/D转换.建立数学模型,利用数据解算得到各磁场分量,排除与地球磁场无关的干扰磁场.再经D/A转换和放大,控制输出与舰船所处位置接收的地球磁场成比例的消磁电流,达到补偿舰船感应磁场的目的.其原理框图见图1.

图1 原理框图
2 排除干扰磁场的算法
由于舰船的感应磁场与作用在舰船上的地磁场成正比,故消磁电流控制仪以地磁场为信号控制消磁绕组电流.但是,安装在舰船上的磁探测器除接收到地磁场以外,同时还接收到其他干扰磁场,需要设法排除.根据干扰磁场的性质和产生原因可以分为固定量和变化量两种,其中固定量一般变化较小且不随舰船姿态变化,而变化量(包括舰船感应磁场、绕组电流产生的干扰磁场以及交叉干扰磁场等)随舰船的姿态和航向的改变不断变化.[2]本文通过对舰船消磁电流和地磁场及各干扰磁场之间关系的分析和相关计算,排除干扰磁场对消磁电流控制信号的影响.
2.1 X和Y分量探头接收的磁场分析计算
安装在舰船上的三分量数据磁强计在任意航向上的X(纵向)和Y(横向)分量探头接收的磁场可表示为

式中:HX和HY分别为X和Y分量磁探头接收的磁场;X(Y)为纵向(横向)探头接收的随余弦(正弦)变化的磁场最大值,即Hd+Xixm(Hd+Yixm),Hd是地球磁场水平分量,Xixm(Yixm)是舰船纵向感应磁性的的纵向(横向)分量和绕组电流产生的纵向(横向)干扰量;Xy(Yx)为纵向(横向)探头接收的横向(纵向)感应磁性的干扰量,即Y(X)分量对X(Y)分量的交叉干扰(不考虑二次交叉干扰量,因二次交叉干扰一般都很小),Xym(Yxm)是Y(X)分量对X(Y)分量交叉干扰的最大值;P(Q)为纵向(横向)磁性的固定干扰量,其实是 Xz(Yz),Xzq(Yzq),Xp(Yp)的代数和,Xz(Yz)是舰船垂直磁性的纵向(横向)分量,Xzq(Yzq)是垂向绕组产生磁场的纵向(横向)分量,Xp(Yp)是固定磁场的纵向(横向)分量.
在4个主航向上,式(1)和(2)可简化如下:

式中:Hxw(Hxe,Hxs,Hxn)表示西(东、南、北)航向 X分量接收的磁场.实际计算时,纵向磁性的固定干扰量一般采用式(3)和(7)计算,即

横向磁性固定干扰量一般采用式(6)和(10)计算,即

横向磁性对纵向磁性的交叉干扰量可以用式(5)和(9)计算:

纵向磁性对横向磁性的交叉干扰量可以用式(4)和(8)计算:

对于任意航向的横向磁性对纵向磁性的干扰量,应该减去横向固定磁性分量,因此任意航向的横向磁性对纵向磁性的干扰量Xy可以表示为

式中:Kgrxy为比例系数.
以东航向为例

将式(15)代入式(1),得

以纵向为例,任意航向纵向绕组电流可表示为

式中:Kx为比例系数(电场/磁场,即电路接收到单位磁场后应输出的电流值).当Ix已知时,结合主航向上所测磁场的数据,可以计算出Kx.
2.2 Z分量探头接收的磁场分析计算
Z分量探头接收的磁场

式中:Zd为地球磁场垂直分量;Ziz(Zix,Ziy)为舰船垂直(纵向、横向)感应磁性磁场的垂直分量;Zzq(Zxq,Zyq)为舰船垂直(纵向、横向)绕组产生磁场的垂直分量;Zp为舰船固定磁场的垂直分量.
因为Ziz,Zzq和Zp在某一航区是固定不变的,三者很难区分开来,在某一纬度区,可以把它们作为固定数处理.设

Z分量探头随航向角变化接收的磁场可改用下式表示:

在4个主航向上,式(18)可简化成

由式(20)和(22)得纵向对垂向的最大干扰量

由式(21)和(23)得横向对垂向的最大干扰量

Zx分量是纵向磁性对垂向磁性的干扰量,与航向角有关,以北航向为例:

式中:Kzx为纵向对垂向磁性干扰量的比例系数.Zx可由主航向测量的数据计算得到

如果不考虑纵向磁性固定分量,可以把北航向的Hxn当作Hx进行计算.同理可以得到Kzy.
式(19)可以被整理为

Hxcos Φ和Hysin Φ是任意航向的磁场值.当采用任意航向的磁场值进行计算时,上式可改写为

垂直分量的最大电流Izmax已知,该分量的磁场可在主航向上测量计算得到,从而可以得到单位磁场对应输出电流值的比例系数Kz.

即

垂直分量的电流

3 仪器性能测试
为能真实模拟控制仪器装船后的运行情况,验证控制仪器的设计思想,方便控制仪器系统调试,在试验台进行相关测试.试验台包括:消磁电流控制仪器(包括调试台);装有X,Y和Z 3个方向绕组的磁性船模;可以使船模以9°/s正反向旋转的转台;3个电机扩大机;负载电阻和直流电源等.
根据调试台电机扩大机输出最大电流值,设定航行区域地球磁场最大水平分量等于38 μT,最大垂直分量等于56 μT,计算出该地区X,Y和Z分量电流值.按照设定的步骤进行试验,船模以9°/s的速度旋转360°,结果见图2和3.对记录图形的说明如下:舰船航行时,纵向接收的地球磁场水平分量与航向角成余弦关系,横向接收的地球磁场水平分量与航向角成正弦关系,图形中的X轴代表纵向电流(反馈电流)值,Y轴代表横向电流值,两个标准圆是允许的误差范围,两条直线是Z分量允许的误差范围.
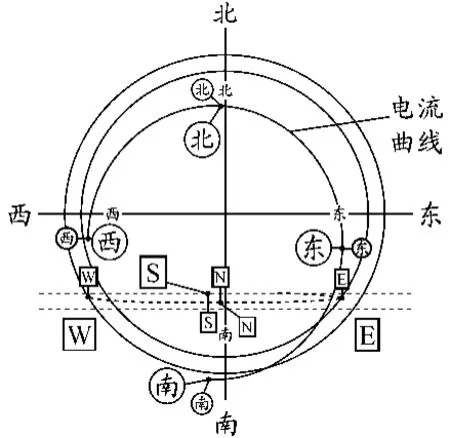
图2 仪器未进行解算记录的电流曲线

图3 仪器进行解算记录的电流曲线
仪器未进行解算时采集的4个主航向的电流数据见表1.

表1 仪器未进行解算时采集的4个主航向的电流数据A
从表中数据可以看出,仪器在未进行解算时:X和Y分量设定的最大电流为8 A,最大绝对误差为2.34 A,相对误差为29%;Z分量设定的最大电流为3.60 A,最大绝对误差为0.73 A,相对误差为20%.
仪器进行解算时采集的4个主航向的电流数据见表2.由图3可以看出经过解算的电流曲线在两个标准圆内.

表2 仪器进行解算时采集的4个主航向的电流数据A
由表2数据可见,仪器进行解算时:X和Y分量设定的最大电流为8 A,最大绝对误差为0.15 A,相对误差为1.9%;Z分量设定的最大电流为3.60 A,最大绝对误差为0.09 A,相对误差为2.5%.
由以上的数据分析和记录的电流曲线可以看出,仪器经过数据解算后能更好地跟踪检测不断变化的地磁场.
4 结论
设计的消磁电流控制仪具有以下性能特点:(1)能自动补偿舰船由于航向、纬度、纵倾和横摇引起的磁场变化,进行消磁电流的全自动调整,并能对局部地磁异常区域和变化的地磁场进行调节;(2)可通过数据解算,排除干扰磁场对消磁电流控制信号的影响,适用于钢铁舰船;(3)无须专用的调整仪器,调整更为方便.
[1]刘君,李庆民,李华.利用舰船磁场特征量对舰船进行定位的方法[J].水雷战与舰船防护,2006(01):28-32.
[2]肖昌汉,卢庆芳,王智勇,等.舰船任意姿态下消磁系统电流变化关系[J].海军工程大学学报,2002,14(1):14-18.
[3]桂永胜.舰船消磁控制设备现状和发展趋势[J].中国舰船研究,2010,5(4):75-80.
[4]NORGREN M,HE S.Exact and explicit solution to a class of degaussing problems[J].IEEE Trans Magn,2000,36(1):308-312.
[5]KIM D,CHOI N,JEUNG G,et al.Optimization of degaussing coil currents for magnetic silencing of a ship taking the ferromagnetic hull effect into account[J].Applied Super-Conductivity,IEEE Trans,2011(99):1-4.
[6]刘大明,何明,刘胜道.基于地磁模式组的舰船消磁电流调整器[J].海军工程大学学报,2001,13(4):18-21.
