阿拉斯加北极滨海平原极地湖泊的水深遥感反演*
2012-05-09乔纪纲
林 征,黎 夏,乔纪纲
(1.中山大学地理科学与规划学院//广东省城市化与地理环境空间模拟重点实验室,广东 广州 510275;2.广东商学院资源与环境学院,广东 广州 501320)
已有证据表明,在过去几十年内北半球高纬度地区受到全球气候变化的影响而不断增温,引起了北极地区的地表环境的强烈变化[1]。极地湖泊是北极陆地地表景观的重要组成部分,同时它也在极地陆地水循环和极地陆地生态系统中扮演重要角色[2]。极地湖泊的观测还能够为揭示极地气候变化提供重要分析依据,因而成为极地观测网络的一项重要任务[3]。
阿拉斯加北部滨海平原地区广泛分布着数以千计的湖泊[4],这些湖泊对全球气候变化表现出灵敏的系统反馈。最直接的表现就是水体深度下降或湖泊干涸;此外,极地湖泊的湖体深度也会引起湖泊表面温度变化,进而引起湖冰消融、湖泊生态系统结构改变、地-气热交换机制变化等一系列环境反馈过程。因此,获取大范围湖体深度分布对研究极地湖泊环境特征及其演化过程首先要解决的技术问题。
近年来,有学者开始利用遥感技术进行北极地区大范围湖体调查,主要是通过多光谱及热红外数据测量湖体面积和反演湖表温度[5-6],而有关湖体深度反演方面成果还较为少见。这主要是受北极地区严苛的自然环境影响,学术界对北极地区地表整体环境的观测经验不足,极地环境的大气和地表环境参数往往难以估计,直接将其用于极地环境下的湖体深度可能存在较大的误差;此外,从少量的实测水深数据也难以直接得到大范围众多湖泊的水深分布状况。
本文以探测阿拉斯加极地湖泊的深度为研究目的,在分析极地湖泊地理特征的基础上验证了Stumpf反演方法对极地环境下的适应性;同时,我们利用船载声纳仪对该地区28个湖泊进行了水深实地探测,并对Stumpf模型做参数估计与精度检验。通过此项研究,试图获取阿拉斯加巴罗地区3 187个极地湖泊较为精确的水体深度的分布及其空间规律,为极地湖泊热环境、水循环以及生态系统演化等方面的研究提供数据基础和技术支持。
1 阿拉斯加北极滨海平原极地湖泊特征及其数据获取
1.1 研究区概况
研究区位于阿拉斯加北极圈内的巴罗地区,东临波弗特(Beaufort)海,西濒楚柯奇(Chukchi)海,南部以布鲁克斯山脉(Brooks Range)冰川山麓为界。其范围大致介于70~71.5 °N,155~161 °W之间,面积约16 380 km2(如图1)。

图1 研究区概貌
巴罗地区滨海平原地势低平,并向海缓慢倾斜,并由数条蜿蜒交错的河流所分割。地表为松散的淤泥质沙滩和沉积于浅海部分的第四纪砾石构成[7]。阿拉斯加北部地区年平均气温通常低于零度,整个区域下伏着连续的永冻土层,该地区的冻土层厚度为400 cm[8],但是在每年夏季都出现25~100 cm的冻土层融解现象。受冻融作用和风蚀作用的影响,区域内广泛分布有极地湖泊;其他地表则主要为杂草、莎草、苔藓和青苔所覆盖。区域内地表平坦且总降雨量较少,约105.9 mm,地表排水系统能力不足,大数量的支流与溪水流动只发生在冰雪融水期间[9-11]。
1.2 阿拉斯加极地湖泊特征
研究区内极地冻融湖和干涸湖盆是主要的地表景观,约占据了近一半面积。极地湖泊发育于地势平坦的滨海平原,由冻土上层冰雪融解形成,一般深度有几米,冬季大多数水体的冰层冻至底部;此类水体的面积可以很大,其长轴可达10 km[12-13]。此外,区域内还分布有大量的小面积池塘(一般边长约50 m,深度约10~50 cm,池塘数量可达数万)和约20个深水湖泊(一般位于山麓,由于冰碛拦截山谷溪流所致)。
本文主要研究对象是极地冻融湖泊和面积较大的池塘。这些湖泊和池塘具有一些共同属性[14],其中与深度反演有关的部分特征如下:
1)湖泊和池塘受气候条件影响大,导致其变化速度快、幅度大且随机性强;
2)极地湖泊和池塘的温度极少升至10 ℃,且几乎从不出现分层现象;
3)极地湖泊和池塘一般浅于2.0 m,通常在冬季完全冻结;
4)浅于2 m的湖泊和池塘一般没有鱼类生存于此;
5)冰层覆盖厚度达1~2 m,且持续时间为8或9个月。
常规的湖沼学调查依赖于对较少的水体进行连续采样;但对于研究区内的湖泊,上述特征对地面调查的规模、季节、范围和频度都有限制,获取完整地面调查数据难度较大。
1.3 数据描述与预处理
遥感能提供研究区内极地湖泊大尺度同步监测,且不受地理位置、地表状况限制。利用Landsat多光谱遥感影像对研究区湖泊的深度进行反演计算,并用实测数据进行验证。研究中使用的数据及其用途描述如下:
1) Landsat 5 TM遥感数据:获取于2010年7月25日,来自美国地质调查局(USGS),原始数据的可见光与近红外波段可用于计算地表反射率,并以此用于湖泊水体深度提取。数据经过几何精校正后,水平方向均方根误差小于0.5个像元。
2)实地水深测量数据:在2008-2010年夏季对研究区内28个湖泊深度进行了船载声纳测量,并获取其相应航行轨迹的水深观测值。
2 反演方法
2.1 水体深度反演模型的回顾
近年来,光学遥感反演水体深度方面的研究日益增多,王艳姣等[15]和Gao[16]对当前水深获取及遥感反演模型进行了较全面的归纳。可见光遥感水深反演模型大体可以分为理论分析模型、半经验以及经验模型模型3种。理论分析模型基于光在水体中的辐射传播过程来建立模型,有完备的理论基础和明确的物理意义,但模型复杂,通常含有大量物理、化学及生物方面的参数。经验模型是一种统计模型,是基于被测水体深度与卫星传感器所接收的辐射之间统计关系的总结,其主要优点是参数较少、简便易用,但理论基础不够完备,缺乏对物理机制的充分理解和认识。半经验模型综合了经验模型和理论分析模型的优点,模型中所用的参数往往虽是经验参数,但又具有一定的物理意义,以便于实地采样与相应参数的匹配。受极地湖泊地表经验以及观测数据不足的约束,理论分析模型和经验模型都不能很好的适应极地湖泊深度反演的工作,而半经验模型能较好的满足研究区域的数据和地表实测数据的要求。
2.2 Stumpf水深反演模型
研究中采用半经验模型中的Stumpf模型(也称为对数转换波段比值算法,Log-transform band ratio)对研究区的冻融湖水体深度进行反演。这种方法比较适合滨海浅水区域环境下的水深反演[17-18]。Stumpf模型与反演的物理机理较简单且易于理解,但该模型对地表环境有一定的要求。北极滨海平原地区地表结构简单,湖体深度也较浅,满足Stumpf模型的应用条件。
该方法的前提假设为:水体中,太阳辐射的衰减率随波长变化而不同,在具有高衰减率波段的上行辐射测量值,将少于低衰减率波段的测量值,水体的反射波谱曲线一般呈现出随着波长增加而减少的规律。随着深度增加,衰减率越高的波段其辐射测量值降低的速度也越快。因此,辐射比值的自然对数对深度的变化更加敏感,尤其是对于研究区中那些水底物质反射率相近时所选中的波段;即辐射值的比值较差值而言,对于水体深度的变化响应更具有代表性[19]。该模型考虑了波段间的比值条件,使得深度与水底辐照度无关,仅需要将比值按比例拉伸至实际深度[18],具体计算方法如下:
(1)
式中,m1为可调常数,用于将比值拉伸至深度;n是对于所有区域的固定常数;m0为对于深度为0时的偏移值;Rw为相应波段λi/j的反射率。式中的固定值n一般假定为对数值在任意条件下均为正值。
2.3 水深反演工作流程
基于半经验水深反演方法的优点与极地湖泊的地理特征,研究中具体采用Stumpf模型反演极地湖泊水深数据,其工作流程如图2所示,各步骤实现方法描述如下:

图2 遥感水深反演工作流程
1)获取实地测量数据:使用安装于船上的Eagle®公司出产的SeaCharter 502C DF水深制图仪,在2009年8月对研究区28个湖泊进行水深测量并制图。利用该仪器自带GPS可接收稳定的WAAS 广域差分信号,将实测数据精确定位并配准到遥感影像上;
2)遥感数据预处理:包括对遥感影像进行辐射定标、大气校正(FLAASH)、几何精校正以及反射率提取等步骤。利用ArcGIS中的区域统计工具(Zonal Statistics)对落入一个像元(30 m×30 m)内的所有水深实测点数据进行统计,并取平均深度值作为该像元的实测水深值,进而得到与实地测量数据相匹配的参考像元。参考像元经过粗差检验,并剔出无效点后共获得有效参考像元共2 800个,这些代表实测水体深度数据的参考像元将被用于训练反演模型和反演结果的精度验证;
3)波段选择:利用参考像元的辐射值与实测水深数据进行相关性分析,选择相关性高的波段用于水深反演模型中的参数估算;
4)模型参数计算:由于反演模型为非线性形式,而需要采用复杂的优化算法来求解。基于Levenberg-Marquardt(LM)的非线性优化迭代算法使用耦合了最速下降法和Hessian逆矩阵方法解决非线性最小二乘问题,在确定非线性模型参数具有明显优势[20-21],本研究中利用SPSS中的LM算法确定非线性模型中的具体参数;
5)模型验证与应用:遥感数据经过几何校正、大气校正和波段选择后,通过分类识别研究区内的湖泊边界并提取湖泊像元的蓝绿波段反射率值,根据Stumpf模型逐像元进行水深反演。同时,将2 800个实测数据(即参考像元)随机分为两个相等部分,其中一个部分用来计算Stumpf模型中的3个参数;另一部分实测数据则用来检验反演精度;最后将通过检验的模型参数用于计算全区域湖泊的水体深度。
3 水深反演过程及结果与验证
3.1 大气校正方法
大气校正的目的是消除大气和光照等因素对地物反射的影响,获得地表的真实物理参数,如地物反射率、辐射率、地表温度等。由于水体离水辐射信号在遥感传感器接收到的入瞳辐射中所占比重小(约为10%),几乎淹没在大气散射信号中。因此,在利用遥感反演水深过程中,必须对遥感数据进行大气校正。
研究中采用了基于MODTRAN4的FLAASH(Fast Line-of-sight Atmospheric Analysis of Spectral Hypercubes)辐射传输模型的大气纠正方法。FLAASH模块利用大气点扩散函数(Point-Spread Function)对邻近像元效应进行纠正,同时提供对整幅影像的能见度计算,FLAASH能够生成卷云与薄云的分类影像,对光谱进行平滑,消除噪声,进而提高大气校正精度[22]。FLAASH支持6种大气模式:近极地夏季与冬季、中纬度夏季与冬季、美国标准以及赤道地区;4种气溶胶基本类型:农村、城镇、近海和沙漠。根据研究经验[22],文中采用中纬度冬季大气模式和近海气溶胶类型对研究区Landsat 5 TM多光谱数据进行大气校正,以消除极地夏季近海环境中的大气气溶胶影响(由于水体反射率低,因此文中将反射率放大104倍)。此外,由于Landsat TM可见光与近红外(VNIR)数据的空间及辐射分辨率仅分别为30 m和8位,且影像噪声较多,因此,湖泊表面的太阳反辉效应在研究区的湖泊中无法观测到。在具体工作中使用经过FLAASH大气校正和中值滤波后的遥感影像对研究区湖泊深度进行反演。
3.2 Landsat TM数据波段选择
选取2 800个声纳仪实测水深值与Landsat TM反射值进行相关性(线性与对数)分析,以便选择参与模型参数估算的有效波段,如图3所示。

图3 Landsat 5 TM各波段与实测水深的相关性分析
通过线性与对数两种拟合模式的比较,与水深值相关性最高的Landsat 5 TM波段1-3(可见光)可用于水深反演模型参数计算。同时,为了减小水深反演误差,具有最小衰减系数的波段应被用于估算水深。因此,文中选用Landsat 5 TM的的蓝光和绿光波段(即波段1和2,其衰减系数最小且与实测水深相关性高)进行湖泊水体深度反演。
3.3 Stumpf模型参数估计
将1 400个实测深度数据以及实测数据对应的像元亮度代入式(1)并计算模型的3个参数,得到的参数值,同时还计算了在95%置信区间内的参数误差,计算结果列入表1。
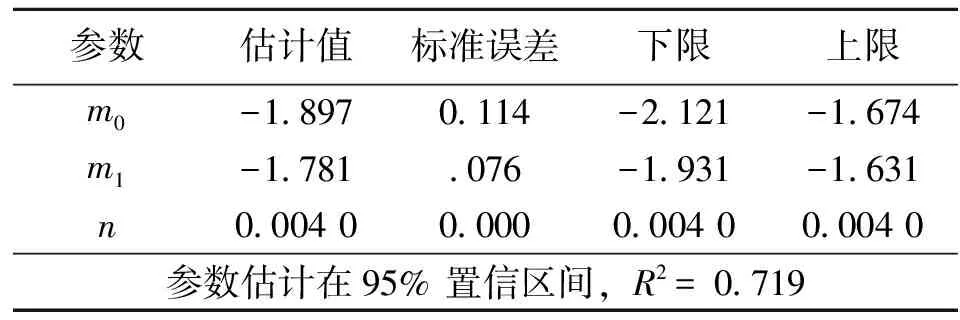
表1 Stumpf模型参数估计1)
表1显示出所估计的Stumpf模型参数用于水深反演时,模型在95%置信区间内有较高的精度,能够用于大范围湖体水深反演。
3.4 水深反演结果及其精度验证
3.4.1 水深反演结果 应用Stumpf模型对全区域3 187个湖泊进行了深度反演,得到的反演结果如图4a所示。详细结果受比例尺所限,仅能给出了典型区域的局部放大图(图4b);更为精确的一个湖泊的水深反演结果由图4c显示,同时也列出了该湖泊实测水深差值后得到的水深分布图,用以与遥感反演结果对比。

图4 水深反演结果(湖泊面积大于1 km2)
由图4可知,利用Landsat 5 TM影像和Stumpf模型能较好的反演出阿拉斯加北极滨海平原湖泊深度,整体结果比较稳定,未出现明显的偏差。图4c也显示出反演深度与实测深度有较好的一致性,遥感反演结果能够刻画出湖盆的形态,而且与实测结果基本吻合。
3.4.2 精度验证 未参与模型参数计算的1 400个实测数据被用来进行水体深度反演精度验证,分别提取这1 400个实测点所在位置的反演深度值,将实测值作为真值,计算反演结果与实测值的平均绝对误差(MAE)、均方根误差(RMSE)以及平均绝对百分比误差(MAPE)分别为0.37、0.54和24.02%,精度验证结果如表2中总体精度一栏所示。
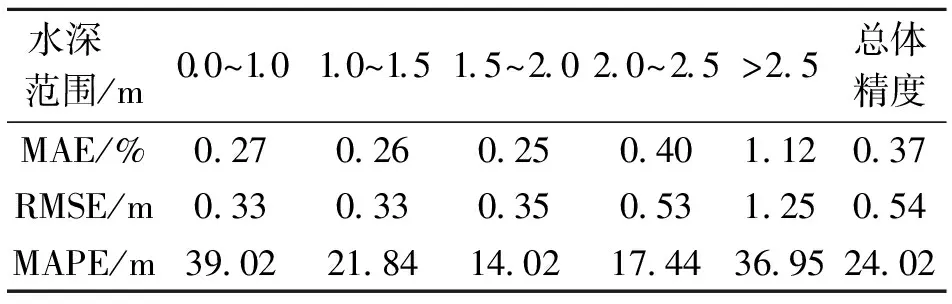
表2 不同水深范围误差检验表
为了进一步检验Stumpf模型在不同水体深度反演的适用范围,文中根据实测水体深度划分为5个不同区间。由表2可看出,Stumpf模型在1.5~2.0 m深度范围内取得最好效果;而当湖泊深度较高或较低时,模型的反演结果出现较大误差。由于研究区的极地湖泊深度一般都小于2.0 m,因此该模型能在研究区极地湖泊水体深度反演中取得较好精度。
4 结 论
阿拉斯加北极滨海平原上广布着数以千计的冻融湖泊,其水体深度是北极滨海平原地表环境的一个重要参数,也是研究区域性气候变化、生态系统演化的关键数据。为了获取研究区内所有冻融湖泊的水体深度,研究中利用28个湖泊的船载声纳实地测量深度值,以及Landsat 5 TM遥感影像对研究区3 187个面积大于0.1 km2的湖泊进行遥感反演,并采用Stumpf遥感水深反演模型进行参数估计与精度验证,获取其水体深度的空间分布。具体结论如下:
1)利用遥感反演方法可以快速有效地获取大范围的湖泊深度数据,是研究北极滨海平原冻融湖泊的形态特征的有效方法。
2) 极地地表和大气环境是影响水深反演的重要因素,而Stumpf水体深度反演模型和FLAASH大气校正方法能较好的适应极地湖泊水深反演的工作。实验结果也表明,论文所采用的工作方法了技术流程对阿拉斯加北部滨海平原的湖泊深度反演有较好的精度。
3) 由于极度湖泊平均深度不大,遥感反演深度的方法能够探测出极地湖泊的湖盆形态,并在较大范围内获得多个湖泊同期的平均深度数据;从反演结果上看,阿拉斯加北部滨海平原极地湖泊平均深度具有沿山麓向滨海平原逐渐下降的趋势表现的十分明显。
致谢:本研究采用的阿拉斯加北极滨海平原冻融湖的实地勘测数据均由辛辛那提大学地理系Kenneth M Hinkel教授主持的国家自然科学基金项目(KMH 0094769 & 0713813)提供,包括研究区内28个船载声纳仪测量湖泊深度数据;辛辛那提大学Hongxing Liu教授提供了有益的帮助和指导;遥感数据来自美国地质调查局(USGS)提供的Landsat TM遥感影像。
参考文献:
[1]SMITH L C,SHENG Y,MaCDONALD,et al.Disappearing Arctic lakes [J].Science,2005,308(5727): 1429.
[2]WALTER K M,ZIMOV,CHANTON,et al.Methane bubbling from Siberian thaw lakes as a positive feedback to climate warming [J].Nature,2006,443(7107): 71-75.
[3]SEARCH.Study of environmental arctic change: Plans for implementation during the international polar year and beyond [R].Fairbanks,Alaska: Arctic Research Consortium of the United States (ARCUS),2005.
[4]HINKEL K M,JONES,EISNER,et al.Methods to assess natural and anthropogenic thaw lake drainage on the western Arctic coastal plain of northern Alaska [J].Journal of Geophysical Research,2007,112(F2): F02S16.
[5]ARP C D,JONES B M.Geography of Alaska lake districts: Identification,description,and analysis of lake-rich regions of a diverse and dynamic state [R].U.S.Geological Survey Scientific Investigations Report 2008-5215,2009: 40.
[6]ARP C D,JONES B M,WHITEMAN M,et al.Lake temperature and ice cover regimes in the alaskan subarctic and Arctic: Integrated monitoring,remote sensing,and modeling [J].JAWRA,2010,46(4): 777-791.
[7]BLACK R F.Gubik formation of Quaternary age in northern Alaska [M].U.S.Government Printing Office,1964.
[8]BROWN J,SELLMANN P.Permafrost and coastal plain history of arctic Alaska[R].Alaskan Arctic Tundra.Arctic Institute of North America,1973,25:244.
[9]LIKES E.Surface-water discharge of Ogotoruk Creek in[R].environment of the Cape Thompson region,Alaska,U.S.Atomic Energy Commission Report PNE-481,1966: 125-132.
[10]BROWN J,DINGMAN S L,LEWELLEN R I.Hydrology of a drainage basin on the Alaskan coastal plain [M].U.S.Army Materiel Command,Cold Regions Research & Engineering Laboratory,1968.
[11]LEWELLEN R I.Studies on the fluvial environment,Arctic Coastal Plain province,northern Alaska [M].Littleton: National Technical Information Service,U.S.Dept of Commerce,1972.
[12]PRESCOTT G W.Preliminary notes on the ecology of freshwater algae in the Arctic slope,Alaska,with descriptions of some new species [J].American Midland Naturalist,1953,50: 463-473.
[13]CARSON,C E,HUSSEY K M.Hydrodynamics in three Arctic lakes [J].The Journal of Geology,1960,68: 585-600.
[14]HOBBIE J E.Limnology of tundra ponds,Barrow,Alaska [M].Dowden,Hutchinson & Ross,1980.
[15]王艳姣,董文杰,张培群,等.水深可见光遥感方法研究进展 [J].海洋通报,2007,26: 92-101.
[16]GAO J.Bathymetric mapping by means of remote sensing: methods,accuracy and limitations [J].Progress in Physical Geography,2009,33: 103-116.
[17]DIERSSEN H M,ZIMMERMAN R C,LEATHERS R A,et al.Ocean color remote sensing of seagrass and bathymetry in the Bahamas banks by high-resolution airborne imagery [J].Limnology and Oceanography,2003,48: 444-455.
[18]STUMPF R P,HOLDERIED K,SINCLAIR M.Determination of water depth with high-resolution satellite imagery over variable bottom types [J].Limnology and Oceanography,2003,48: 547-556.
[19]LEGLEITER C J,ROBERTS D A,MARCUS W A,et al.Passive optical remote sensing of river channel morphology and in-stream habitat: Physical basis and feasibility [J].Remote Sensing of Environment,2004,93: 493-510.
[20]MARQUARDT D W.An algorithm for least-squares estimation of nonlinear parameters [J].Journal of the Society for Industrial and Applied Mathematics,1963,11: 431-441.
[21]MORE J.The Levenberg-Marquardt algorithm: Implementation and theory [J].In Numerical Analysis,1978,630: 105-116.
[22]ITTVIS.ENVI 4.8 Help [M].Boulder,CO,2010.
