基于一体化摄像机的清晰度评价函数研究
2012-04-27中国民航大学电子信息工程学院韩圣洁
中国民航大学电子信息工程学院 韩圣洁
1.引言
一般来说,一体化摄像机是指可以自动聚焦、镜头内建的小型摄像机。外观上,具有美观、小巧。应用上,其电源、视频、控制信号均有直接插口,安装方便。功能上可自动聚焦,近些年,一体化摄像机在视频会议、安防监控、高速公路监控等场合的应用越来越广泛。
自动聚焦技术的发展对一体化摄像机的广泛应用也起着非常重要的作用。传统的聚焦方法基本属于测距法,利用超声波或者红外线测量目标与摄像机之间的距离从而调整焦距以实现自动聚焦。由于要有发射和接收装置,提高了成本,并且会使得摄像机显得笨重。
随着数字图像处理理论的不断成熟,越来越多的自动聚焦算法是基于图像处理理论的。数字图像处理理论认为,信号或图像的大部分能量集中在幅度谱的低频段和中频段,但是图像细节的丰富度和轮廓的锐度取决于图像的高频成分。因此,各种检验图像边缘信息或计算图像高频分量的自动聚焦算法应运而生。一帧图像中的高频成分值被称为清晰度评价函数,自动聚焦的过程就是求取清晰度评价函数最大值的过程。当图像清晰时,图像细节丰富,在空域表现为相邻像素的特征值,如灰度、颜色等变化较大,在频域表现为频谱的高频分量多。可以评判图像中高频分量的大小,并判断对焦正确与否。
确定合适的清晰度评价函数是自动调焦的核心问题。理想的自动调焦评价函数必须具备以下几个特征[1]:
a.无偏性。计算出来的曲线要和图像的清晰度变化事实相吻合;
b.单峰性。在成像系统的正焦位置取得单一的极值,不能出现其他局部极值;
c.灵敏度。是指对不同程度的离焦图片,清晰度评价值要求有一定的差别;
d.具有足够的信噪比。在一定的噪声干扰条件下,保证系统正确地检测到离焦信号,完成自动调焦;
e.高效性。计算能够满足实时性要求,保证迅速完成自动调焦过程。
图1是图像高频成分含量与聚焦镜头位置之间的关系。
2.常用清晰度评价函数的研究

图1 图像高频成分含量与镜头位置的关系
图像清晰度评价函数在基于图像处理的自动调焦技术中起着关键的作用。图像清晰度识别技术近年来已引起国内外学者的重视,其中最流行的是时域对比度评价函数,常用的有Brenner函数、Tenengrad函数、Robert函数、Laplace函数、方差函数和平方梯度等[2][3][4];还有频域的频谱评价函数[5];小波变换评价函数[6];基于DCT变换的评价函数[7];神经网络评价函数[8]。其中频域类、统计学类等调焦函数由于在调焦过程中对环境的稳定性要求较高,并且其调焦曲线非常不理想,大多数都不能正确的表达焦点的位置,同时考虑到聚焦速度和准确性的要求,因此没有列入,我们选择常用的时域对比度评价函数进行分析。
Brenner函数,是最简单的与梯度有关的评价函数[9][10][11],它只是计算相差两个单位的两个像素的灰度差,该函数的优点是具有较高的灵敏度且计算量较小,其表达式为:

式中,I(x,y)表示图像中第x行第y列像素的灰度值。当调焦评价函数F(I)数值最大时,图像最清晰。
Robert梯度评价函数,是在灰度差分绝对值之和算法基础上考虑I(x,y)和I(x+1,y+1),灰度差的像元位置关系后,采用的一种评价函数,其表达式如下:

表1 光学系统参照表

式中I(x,y)表示图像中第x行第y列像素的灰度值。
方差函数,清晰聚焦的图像应有比模糊的图像具有更大的灰度级差异,所以方差函数也可以作为一个对焦清晰的评价标准[9][12]。方差函数定义为:

式中μ为平均灰度级,

I(x,y)表示图像中第x行第y列像素的灰度值。
平方梯度函数,它用相邻点的差分计算一个点的梯度值[12],其算法如下:

其中I(x,y)为一幅图像在点(x,y)的灰度值。
Tenengrad函数,它使用Sobel算子来算图像在水平方向和垂直方向的梯度,为了使图像边缘的梯度最大,对梯度进行平方运算,其表达式如下所示:

Laplace函数,使用Laplace算子和图像进行卷积得到图像的二阶微分,其微分平方和作为最后评价结果,其表达式如下:
3.清晰度评价函数的性能分析
为了便于比较这六种算法的性能和特点,按照清晰度评价函数应具备的特性,我们从三个角度对这六种清晰度评价函数的性能进行分析。本文采用小龙电器公司自主研制生产的一体化摄像机SMC-480,其光学系统参数表如表1所示。
3.1 清晰度评价函数的曲线特性对比
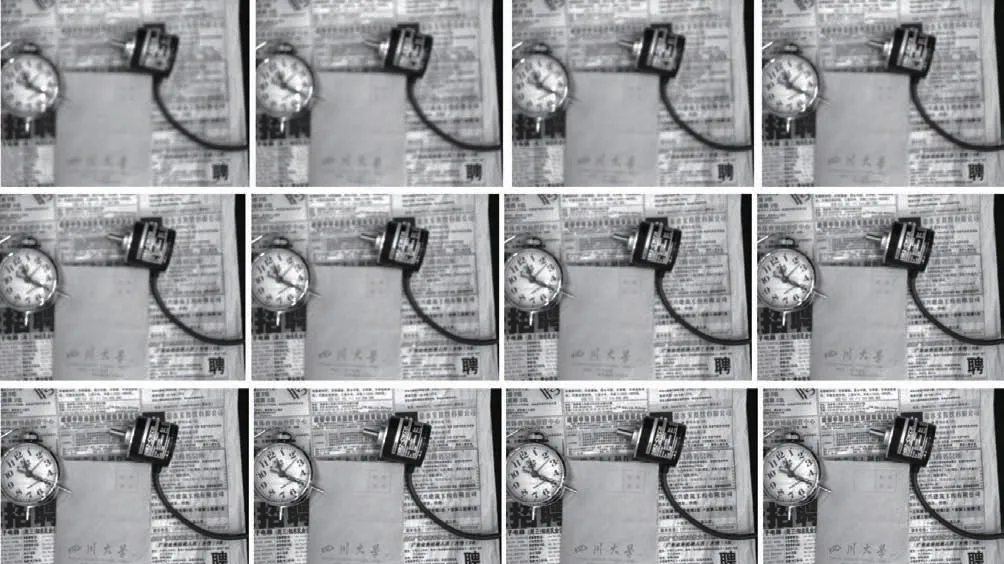
图2 实际调焦过程采集到的12张图像序列
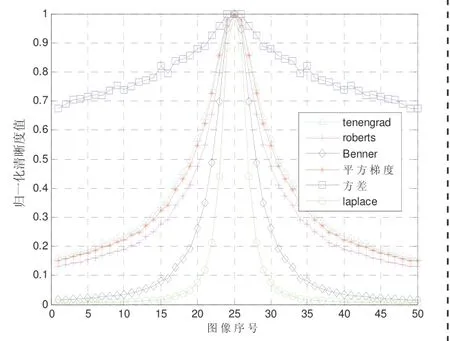
图3 不同程度离焦图像各函数归一化后的清晰度评价值

图4 不同程度离焦图像各函数的敏度测试
本文为研究清晰度评价函数,其数据源都是针对同一组图像进行处理,同时该组图像是对同一平面目标,通过控制一体化摄像机调焦镜头的前后纵向位置来实现图像的调焦,前后纵向移动的步进间隔距离为0.004mm。在聚焦点位置前后分别采集24个欠焦和24个过焦图像。加上聚焦良好图像,共得到50幅图像。采集的图像大小为640 pixel×480 pixel。本文的数据分析是以采集到的图像数据为依据,并将图像序号按由最远的欠焦状态经过聚焦状态后,再到过焦状态编排,共采集了50张图片,如图2给出了其中的12幅示意图。
为了便于比较各种算法的性能和特点,本文将上述六种算法的仿真结果描绘出来,如图3所示。它的纵坐标表示各种算法的归一化图像清晰度评价值,横坐标表示不同程度的离焦图片的序号,共50张。图4是对图3函数极值的局部放大。
从图3和图4中可以得出如下结论:1)对图像的单峰性来说,Brenner函数、Tenengrad函数、Robert函数、Laplace函数和平方梯度等能得到比较一致的结果,并且只有一个极值点,具有单峰性,符合要求,而方差函数的极值点不够突出,容易产生误调焦,因此不能使用。2)从图像的无偏性来说,Brenner函数、Tenengrad函数、Robert函数、Laplace函数和平方梯度等的清晰度评价值都随着图像的离焦或者变焦程度变化而变化,都在第25幅图像位置取得最大值,这和肉眼看到的事实是相符合的。3)从图像的灵敏度角度来看,Laplace函数和Brenner函数的峰顶宽度相对较窄,相对而言,Laplace函数更为尖锐,灵敏度高,因此适合于小范围精确调焦。也就是说,对微小焦距的改变更为敏感,性能上更加优良。Tenengrad函数、Robert函数和平方梯度的灵敏度居中,在焦点附近具有比较高的灵敏度,同时也有一定的调焦范围,适于中等范围的自动调焦。

图5 标准图像和模糊加噪图像对比
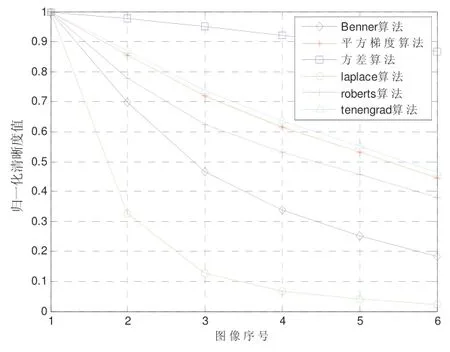
图6 图像清晰度判别函数比较

图7 模拟实验拍摄到的图片示意图

图8 图像清晰度判别函数比较
3.2 图像加噪声后清晰度评价函数的曲线特性
我们对标准图像加入噪声,根据模糊成像原理,可以用高斯函数对标准图像进行处理。高斯模糊的基本思路是根据二维正态分布公式生成一个高斯矩阵,求新图像中的每一点时,将高斯矩阵的中心对准旧图像的这一点,并将所有点根据高斯矩阵上对应的点加权平均。二维正态分布公式如下:

u,v分别为水平、竖直距离。高斯模糊的标准差σ,表示模糊的延伸距离,它的缺省值一般设为1。当时,高斯矩阵上对应的权值已经小得可以忽略,因此可以只计算一个大小为的矩阵。通过设置不同的模糊半径(radius)参数即需要移位的像素数,达到不同程度的高斯模糊效果。图像数据源仍是图二所示中采集到的图像,现在我们对标准图像分别进行1×1-6×6半径的高斯模糊,同时添加方差为20的高斯噪声,得到6幅图像,图5给出了其中一幅聚焦清晰和一幅清晰图像的加噪图像。
实验结果如图6所示,纵坐标是每个清晰度评价函数的归一化值,横坐标是受不同噪声影响的6幅不同图像,从图中可以看出,Laplace函数和Brenner函数在峰值附近变化明显,在一定的噪声干扰条件下,能识别出噪声影响的程度,该函数性能灵敏度高,具有足够的信噪比,其聚焦分辨力和抗噪性能明显优于其他方法。而Tenengrad函数、Robert函数和平方梯度的信噪比居中,方差函数的抗干扰性能则最差。
3.3 清晰度评价函数实验验证
上述中本文对清晰度评价函数的性能和特点进行了分析,不过为了进一步验证Laplace函数、Brenner函数、Tenengrad函数、Robert函数和平方梯度函数的性能,本文采集了另外图像进行验证。通过控制一体化摄像机调焦镜头的前后纵向位置来实现图像的调焦,前后纵向移动的步进间隔距离为0.008mm。在聚焦点位置前后分别采集14个欠焦和14个过焦图像。加上聚焦良好图像,即第15幅,共得到29幅图像。采集的图像大小为630 pixel×490 pixel。
通过matlab仿真,本文得到如下结论,如图8所示。
在图7中,Laplace函数、Brenner函数、Tenengrad函数、Robert函数和平方梯度函数的归一化清晰度评价函数值的最大值都在图像序号为15的位置,也刚好是最佳聚焦图像。这和实际图像采集中是相对应的。同时,就Laplace函数和Brenner函数相比较而言,他们都满足单峰性,不过Laplace函数更为尖锐,灵敏度高。Tenengrad函数、Robert函数和平方梯度和图3及图4的结论相一致。
4.结论
清晰度评价函数是数字图象处理的一个重要内容之一,对于实现一体化摄像机自动对焦具有重要的意义。本文在小龙电器公司生产的一体化摄像机SMC-480研究的基础上,针对目前常用的清晰度评价函数的实用性能加以评价,对比实验证明,Laplace函数和Brenner函数的峰顶宽度相对较窄,灵敏度高,因此适合于小范围精确调焦。Tenengrad函数、Robert函数和平方梯度的灵敏度居中,在焦点附近具有比较高的灵敏度,同时也有一定的调焦范围,适于中等范围的自动调焦。
[1]屈玉福.视觉瞄准测头的研究[D].哈尔滨:哈尔滨工业大学,2001:20-24.
[2]沈庭芳,方子文.数字图像处理及模式识别[M].北京:北京理工大学出版社,1998.
[3]夏德深,傅德盛.现代图像处理技术与应用[M].南京:东南大学出版社,1997.
[4]Castleman K R.数字图像处理[M].北京:电子工业出版社,1998.
[5]李奇,冯华君,徐之海,等.数字图像清晰度评价函数研究[J].光子学报,2002,31(6):736-738.
[6]谢攀,张利,康宗明,等.一种基于尺度变化的DCT自动聚焦算法[J].清华大学学报,2003,43(1):55-58.
[7]陈国金,朱妙芬,施浒立等.基于最小各向同性小波滤波的图像清晰度识别[J].光子学报,2008,37(2):395-399.
[8]陈国金,朱妙芬,施浒立.小波变换与神经网络复合的图象清晰度识别研究[J].红外技术,2007,29(11):670-674.
[9]TTE Yeo,S H Ong,Jayasooriah and R Sinniah.Autofocusing for Tissue Microscope.Image and Vision Computing.1993,11(10):629-639.
[10]Lawrence Firestone,Kitty Cook,Kevin Culp,Neil Talsania,and Kendall,Preston,Jr.Comparison of Autofocus Methods for Automated Microscopy.1991(12):195-206.
[11]Brenner,J F,Dew,B S,Horton,J B,King,T,Neirath,P W and Sellers,W D.An Automated Microscope for Cytologic Research.1971(24):100-110.
[12]H.Harms and H.M.Aus.Compaison of Digital Focus Criteria for a TV Microscope Systeml.Cytometry.1984:236-243.
