移动机器人环境视觉小波稀疏压缩传感和识别*
2012-04-24马如远金明亮刘继忠柴国钟
马如远,金明亮,刘继忠* ,柴国钟
(1.浙江工业大学机械学院,杭州310000;2.南昌大学机电工程学院,南昌330031;3.嘉兴学院机电工程学院,浙江嘉兴314001)
环境认知是通过图像传感器获取环境图像信息,将图信息像看成一个数据矩阵,通过计算机分析处理,进行特征提取和模式识别,完成相关后续任务(如智能机器人自主运行,智能交通等)的重要举措。图像采集部分大多采用DSP与图像传感器相连,采集到的数据由PC机进行后续处理。然而采集到的数据量庞大,一般都有几十万到几百万个数据,会严重影响系统运行速度与处理性能,特别是对嵌入式视觉系统或处理实时性要求较高的视觉系统。自从2006美国斯坦福大学的Donoho和Candès从信号分解和逼近理论提出了压缩传感[1],为这一问题的解决提供了新的方法。压缩传感将采样与压缩结合起来,有效减少采集的数据量,降低系统整体复杂度,加快系统运行速度和提高系统处理性能,但目前压缩传感的研究仍还大都集中在不同方法的压缩传感及信号重构方面[2-8]。2011年米红妹[9]针对雷达回波压缩传感信号进行了低分辨雷达目标识别研究,Ren Yuemei[10]也对基于压缩传感的空间目标识别进行了有益的尝试,虽然前者是基于雷达信号特征的稀疏采样抽取,后者是通过稀疏系数构建获得识别信息库,但也从侧面对直接压缩传感信号特征识别提供了支持。本文将从提高移动机器人嵌入式视觉处理速度和实时性出发,进行机器人环境视觉压缩传感信号直接特征识别研究。不同于事先路径规划的移动机器人运行[11],移动机器人嵌入式视觉系统处理实时性对于自主运行机器人具有极其重要性,环境视觉压缩传感信息的直接特征识别,对于提高嵌入式视觉系统处理速度和处理性具有更进一步的意义。文献[12]借用压缩传感思想和压缩图像矩阵实现了移动机器人嵌入式视觉实时导航,赵士彬等提出了一种基于压缩感知的低功耗高效率CMOS图像传感器[13],为移动机器人嵌入式视觉压缩感知提供了可行性。本文基于正交小波稀疏,通过道路和草坪典型环境图像压缩传感直接特征提取识别与环境认知研究和实验,验证压缩传感信息直接特征提取识别的可行性。
1 压缩传感理论
压缩传感理论表明:如果原始信号或图像具有稀疏表示,通过合适的优化算法,可由少量的采样值或观测值来进行信号或图像的重建。其核心思想是将压缩与采样合并进行,可以大大减少数据处理量,一般过程是:首先采集信号的非自适应线性投影(测量值),然后根据相应重构算法由测量值重构原始信号。因此,压缩传感理论主要包括信号的稀疏表示、编码测量和重构算法等三个方面[14]。
(1)信号的稀疏表示就是将信号投影到正交变换基时,绝大部分变换系数绝对值很小,所得到的变换向量是稀疏或者近似稀疏的,可看作是原始信号的一种简洁表达,这也是压缩传感的先验条件。通常变换基可以根据信号本身的特点灵活选取,常用有离散余弦变换基、快速傅里叶变换基、离散小波变换基、Curvelet基、Gabor基以及冗余字典等。
(2)在编码测量中,首先选择稳定的投影矩阵,为了确保信号的线性投影能够保持信号的原始结构,投影矩阵必须满足约束等距性RIP(Restricted I-sometry Property)条件,然后通过原始信号与测量矩阵的乘积获得原始信号的线性投影测量。最后,运用重构算法由测量值及投影矩阵重构原始信号。
(3)信号重构过程一般转换为一个最小L0范数的优化问题,求解方法主要有最小L1范数法、匹配追踪系列算法、最小全变分方法、迭代阈值算法等。
本文主要针对自主移动机器人视觉环境感知的实时性问题,对环境视觉压缩传感采样,不经过信号重构过程,而是基于小波稀疏,直接进行典型纹理环境图像压缩传感信息的特征提取与识别研究,验证这种方法及提高视觉处理实时性的可行性。
2 小波稀疏
稀疏性是信号本身的特性,指信号可由少量的非零元素来表示。图像信号包括已压缩后的商用编码标准的JPEG和JPEG2000多为稀疏信号[15]。设信号x是长度为N的K稀疏信号,那么它则可由冗余基ψ∈RM的K(K≪M,M≥C0KlogN)个基向量的线性组合来表示,如下式(1)所示。

式中α表示变换系数,α=ψTx。文中采用正交小波基进行稀疏,给定基本小波函数ψ(t),则信号f(t)的连续小波变换为:
a为尺度参数,b为平移参数。
通常小波框架都不是L2(R)的正交基,其信息存在冗余,若小波函数的伸缩平移系{ψa,b(t)}a,b∈Z是正交系就可以得到无冗余的小波框架。设ψ(t)∈L2(R)的一个可容许小波,若其二进伸缩平移系满足下面关系:

正交小波提供原始信号的正交分解,各分解系数彼此独立,从而可以去除冗余,减少数据量。由于小波只对信号的低频部分做了进一步的分解,而对高频部分也即是信号的细节部分不再做继续分解,所以小波变换能够很好表征一大类以低频信息为主成分的信息,但它不能很好地分解和表示包含大量细节信息。数据量较大的高频系数只是在信号具有奇异性的地方,其小波系数模值才显著大于零,其它地方将非常小甚至为零,小波细节的这种特性为信号压缩和减少数据量提供了可能。与一般小波不同的是,正交小波可以对高频部分提供更精细的分解,而且这种分解是无冗余的。为验证正交小波稀疏效果,本文首先采用经典Lena图像进行了稀疏分析,结果如图1所示,可以看出稀疏后的图像在较小范围内的保留了原始图像的信息。实际环境图像本文采用表征移动机器人野外运行环境的路面和草坪两种典型环境图像,由于包含了许多边缘和纹理的重要细节信息,采用正交小波稀疏后得到的柏油道路、同类草坪纹理环境图像的正交小波稀疏后的图像分别如图2和图3所示。

图1 Lena图像正交小波稀疏
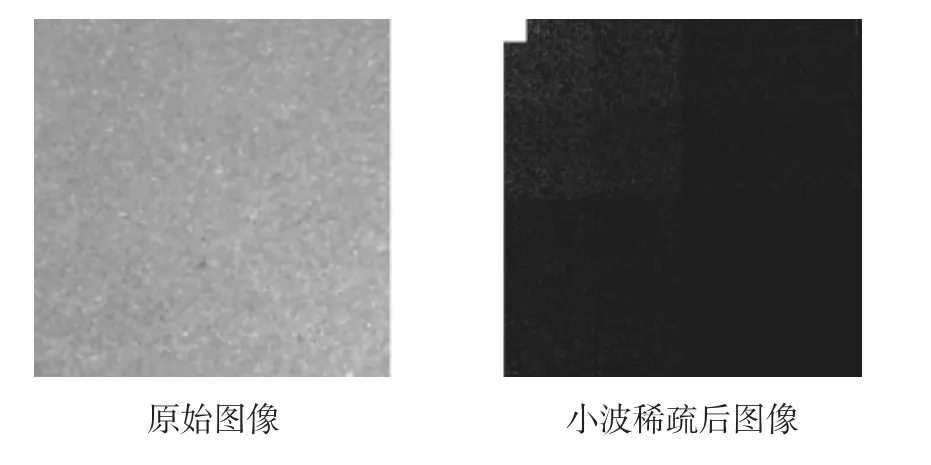
图2 路面图像正交小波稀疏

图3 草坪图像正交小波稀疏
3 压缩传感信息特征提取与环境认知
3.1 纹理特征参数提取
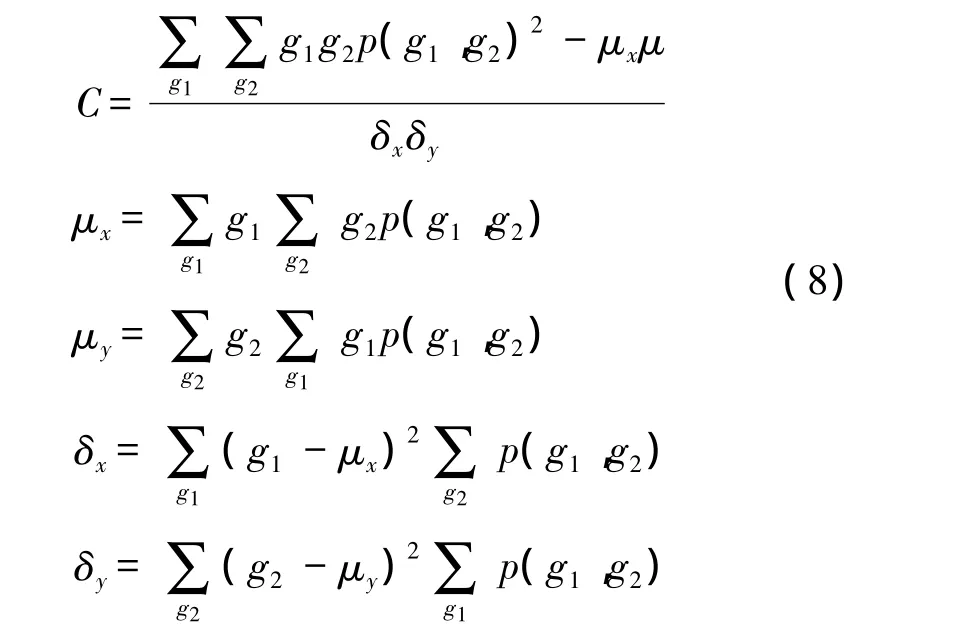
纹理是很多自然景物的一个重要特征。通常认为纹理是指图像在灰度或颜色分布呈现某种规律性,这种规律性在不同类别的纹理中有其不同特点。自然界中的马路和草地,它们的纹理基元没有明确的形状,而是某种灰度或颜色的分布,这种分布在空间位置上的反复出现形成纹理,这样的重复在局部范围内往往难以体察出来,只有从整体上才能显露,属于典型的自然纹理。纹理特征描述对象物表面的粗糙程度和它的方向性,一般而言,自然纹理图像通常采用统计分析方法,主要是基于图像像素的灰度值的分布与相互关系,基本原理是选择不同的统计量提取纹理图像的统计特征。文中采用灰度共生矩阵方法[16],进行纹理特征提取,原理方法如下:
设一幅N×N图像的在任意一点(x,y)扫描至另外一点(x+a,y+b),若对应的灰度值为(g1,g2),统计出每一种(g1,g2)值出现的次数,然后排列成一个方阵,并用(g1,g2)出现的总次数将它们归一化为出现的概率p(g1,g2),这样的方阵称为灰度共生矩阵。若a=1,b=0,像素对是水平的,为0°扫描;a=1,b=1,像素对是右对角线的,为 45°扫描;a=0,b=1,像素对是垂直的,为 90°扫描;a=1,b=-1 时,像素对是左对角线,即135°扫描。纹理图像的共生灰度矩阵一般采用下面的四个主要参数对图像进行识别:
纹理能量:

纹理惯性:

纹理熵:

纹理相关性:
本文随机选取10幅柏油道路、同类草坪环境图像,对小波稀疏后的图像进行了纹理特征参数提取,结果发现此两类环境图像的四个扫描方向上的同种参数结果相近,具有一定的旋转不变性的纹理参数特征。因此,可取参数均值¯E、¯H、¯I、¯C作为图像认知的特征参数。两种图像小波稀疏后的四种特征参数均值和最大均值误差如表1所示。

表1 小波稀疏后两种典型环境图像的特征参数
文中图像是在智能轮椅移动机器人固定嵌入式视觉系统与环境距离,图像传感器装有辅助照明装置情况下[12]采取得到。为分析日照对嵌入式视觉压缩传感图像纹理特征参数的影响,取不同光照下(稍弱、中等、较强)的同一环境图像进行了小波稀疏压缩传感纹理参数特征提取研究,结果发现当光照强度增强的情况下,实验样本中的纹理惯性I、纹理熵H略有增加,纹理能量E、纹理相关性C略有减小,当光照变化不大的情况下可近似忽略光照影响。
3.2 典型环境认知识别
由上述可知,同种环境压缩传感图像具有相近的特征参数,可取训练样本特征参数均值¯E、¯I、¯H、¯C作为特征判断阈值,我们将待识别压缩传感环境图像的特征参数与判断阈值的相近度定义为相似度函数作为识别依据。那么与某种环境压缩传感信息特征阈值相近度越大,越说明属于该种环境。为使相似度函数与其数值结果相一致,我们取待识别图像特征参数与判断阈值的欧氏距离的倒数作为相似度判据函数FS,即

i表示不同压缩传感环境参数特征阈值序号,如果该种压缩环境图像的第i个相似度函数FS的数值最大,说明待识别压缩传感环境图像与第i种特征阈值最为相近,也就说明属于第i种特征环境,即
FS(i)=max(FS)
⇒{待识别环境∈第i种特征环境}
本文i取1或,即柏油道路或同类草坪。
随机取4幅柏油道路、4幅同类草坪共8幅图像作为验证样本,进行小波稀疏后分别计算特征参数纹理能量¯E、纹理惯性¯I、纹理熵¯H、纹理相关性¯C和相似度判据函数FS,得到对应8幅图像的相似度判据函数的数值如表2所示。
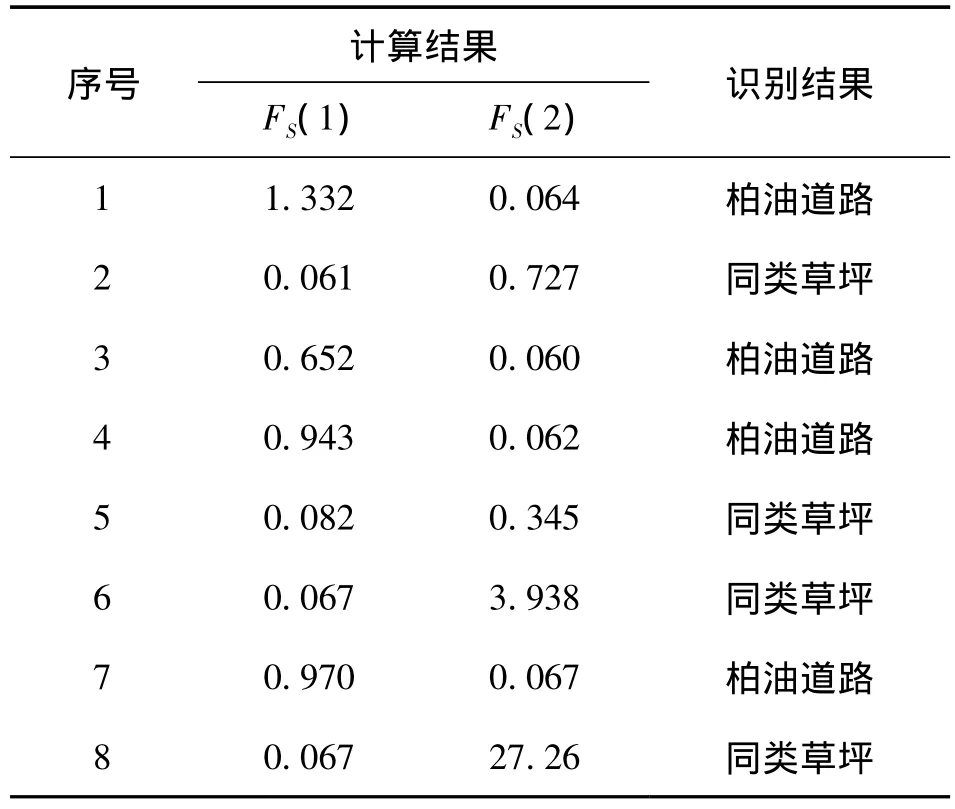
表2 压缩传感信息典型环境图像识别结果
由表2结果可以看出,待识别图像与两个判据特征阈值的相似度差别较大,通过压缩传感后的直接信息,可以正确识别两种典型环境,说明了通过压缩传感信息进行直接环境认知的可行性。下一步可进一步研究多类型环境感知(包括其他不同类型环境和形状等其他图像特征压缩传感表征)与嵌入式视觉处理实时性问题,以及光照、距离对压缩传感特征表征影响的函数修正。
4 结束语
为了提高移动机器人视觉环境感知处理实时性和视觉系统运行性能,文中基于小波稀疏进行了两种典型环境的压缩传感信息直接特征处理识别研究,结果表明在小波稀疏下,利用压缩传感信息可以直接识别纹理环境图像,为进一步的压缩传感信息的直接特征识别和特征保留研究提供了前期基础,为基于视觉特别是嵌入式视觉的自主移动机器人环境认知实时性问题的解决提供了一种新的思路。
[1] Donoho D.Compressed Sensing[J].IEEE Transactions on Information Theory,2006,52(4):1289-1306.
[2] 佘青山,徐平,罗志增,等.一种新的分块压缩传感图像重建算法[J].东南大学学报(自然科学版),2011,41(sup):27-31.
[3] 魏苗,练秋生.基于压缩传感的宽带频谱协方差感知算法[J].传感技术学报,2011,24(7):1022-1026.
[4] Usman M,Prieto C,Odille F,et al.A Computationally Efficient OMP-Based Compressed Sensing Reconstruction for Dynamic MRI[J].Physics in Medicine and Biology,2011,56(7):N99-N114.
[5] Amini Arash,Marvasti Farokh.Deterministic Construction of Binary,Bipolar,and Ternary Compressed Sensing Matrices[J].IEEE Transactions on Information Theory,2011,57(4):2360-2370.
[6] 练秋生,陈书贞.基于混合基稀疏图像表示的压缩传感图像重构[J].自动化学报,2010,36(3):385-391.
[7] 苏晓园,练秋生.基于迭代收缩法和三维复数小波的视频压缩传感重构[J].光电工程,2010,37(2):108-112,121.
[8] 金炜,符冉迪,叶明,等.采用残差估算的卫星云图压缩传感重建[J].应用科学学报,2011,29(5):495-499.
[9] 米红妹,邱天爽.基于压缩传感特征提取的低分辨雷达目标识别[J].计算机应用,2011,31(8):2105-2107.
[10] Ren Yuemei,Zhang Yangning,Li Ying.A Space Target Recognition Method Based on Compressive Sensing[C]//Proceedings-6th International Conference on Image and Graphics,Hefei,China,2011:582-586.
[11]陈世明,聂森,丽楠,等.模糊空间中基于人工势场的移动机器人运动规划[J].南昌大学学报(工科版),2010,32(2):192-195.
[12] Liu Jizhong,Wu Xuepei,Xia Jiating,et al.Visual Navigation of a NovelEconomicalEmbedded Multi-Mode IntelligentControl System for Powered Wheelchair[C]//Advances in Neural Network Research and Applications,LNEE,2010,67(6):503-511.
[13]赵士彬,姚素英,徐江涛.基于压缩感知的低功耗高效率CMOS图像传感器设计[J].传感技术学报,2011,24(8):1151-1157.
[14] 李树涛,魏丹.压缩传感综述[J].自动化学报,2009,35(11):1369-1374.
[15]金坚,谷源涛,梅顺良.压缩采样技术及其应用[J].电子与信息学报,2010,32(2):470-475.
[16]彭辉.基于纹理特征的图像识别分类[J].计算机与信息技术,2007,11:16-20.
