侧风干扰工况电动汽车EPS反向助力控制及试验
2012-04-24赵景波周冰贝绍轶
赵景波, 周冰, 贝绍轶
(1.江苏技术师范学院机械与汽车工程学院,江苏常州213001;2.江苏技术师范学院计算机工程学院,江苏常州213001)
0 引言
电动汽车产业是国家战略性新兴产业之一,具有低碳、清洁、低耗等环保节能的显著特性。电动助力转向系统(electric power steering,EPS)是电动汽车设计装配过程中的关键部件之一,直接通过电动机的输出给驾驶员提供助力,电动机只有在转向时才工作,在不进行转向时几乎没有动力消耗;且具有轻型小巧、装配迅速、易于调整、噪声及废气污染小等优点[1],也是底盘集成控制技术的研究热点之一[2]。
EPS控制策略的设计是其开发的关键,在传统的正向助力策略中,EPS根据输入的方向盘扭矩信号和车速信号确定基本助力,实现助力过程[3]。汽车在侧风干扰的特殊工况下,驾驶员输入的方向盘扭矩信号为零,由于侧风的作用,汽车产生沿侧向风作用方向的偏移,由于车轮与方向盘之间的刚性连接,方向盘被动产生与车轮同向的偏转,因而产生一个被动的方向盘扭矩。设计一种反向助力策略和柔性PID控制方法,以侧风干扰下的方向盘被动扭矩为输入信号,计算目标电流,通过电动机进行反向助力,在驾驶员无输入情况下实现主动转向控制,避免汽车过度偏驶。
1 EPS系统动力学模型
EPS系统如图1(a)所示,控制器根据各传感器输出的信号决定电动机的转动方向和最佳助力扭矩,向电动机和离合器发出控制信号,通过功率驱动电路控制直流电动机的转动,电动机的输出经过减速机构减速增扭后,驱动齿轮齿条机构,产生相应的转向助力。通过精确的控制算法,可任意改变电动机的扭矩大小,使传动机构获得所需的任意助力值。建立EPS系统动力学模型,如图1(b)所示[4]。
由于转向盘的转动惯量和粘性阻尼,为旋转的弹簧-质量-阻尼系统,有

式中:Js为转向盘、输入轴的转动惯量;Bs为输入轴粘性阻尼系数;θs为输入轴旋转角;θe为输出轴旋转角;Ks为扭杆的刚性系数;Th为作用在转向盘上的转向转矩;Tsen=Ks(θs-θe)为扭杆的反作用转矩。
EPS系统采用永磁有刷直流电动机,有

式中:Jm为电动机和离合器的转动惯量;Bm为电动机粘性阻尼系数;θm为电动机的转角,电动机的转速ωm=;Tm为电动机电磁转矩;TL=Kr(θm-Gθe)为电动机的负载转矩(即助力转矩);Kr为电动机和减速机构的输出轴刚性系数;G为蜗轮-蜗杆减速机构的减速比。
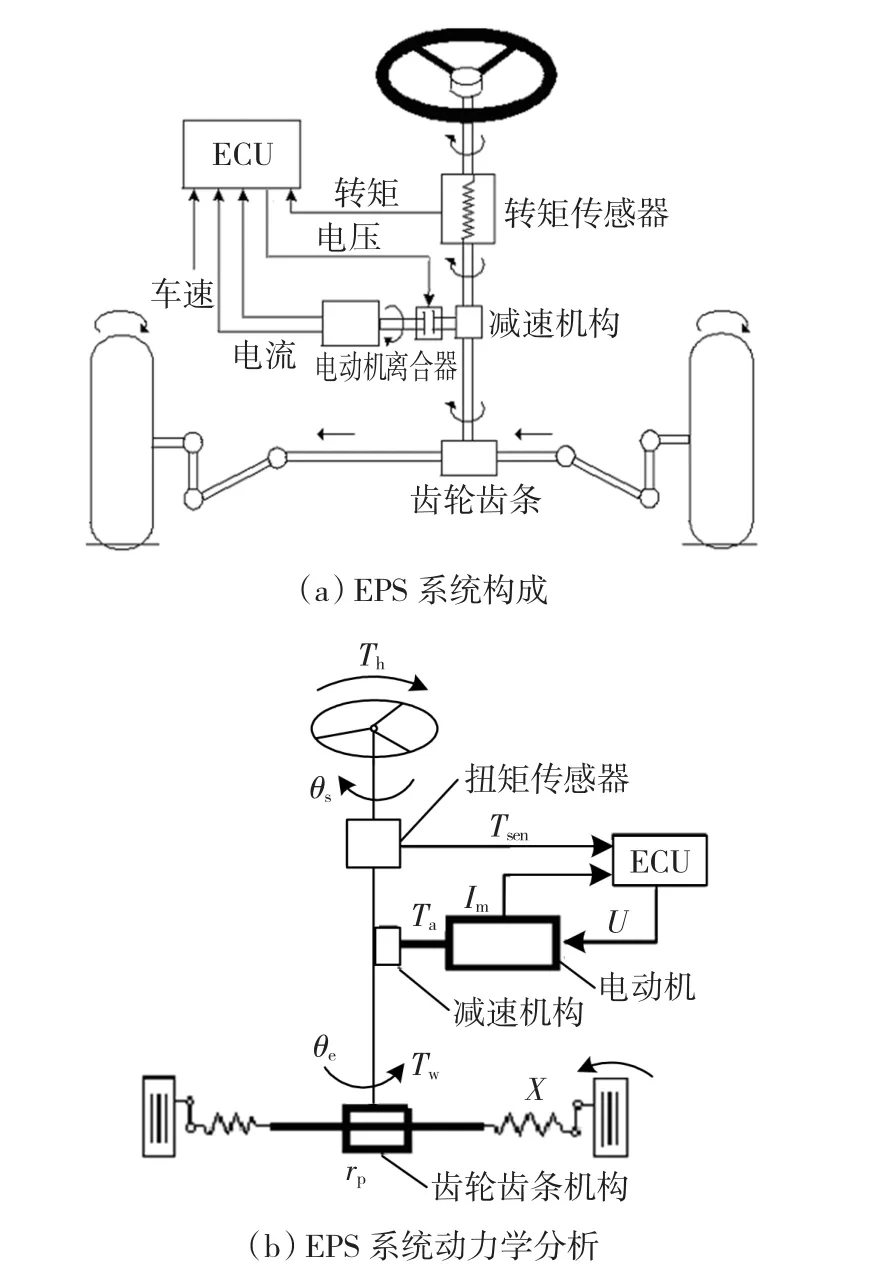
图1 EPS系统动力学分析Fig.1 Dynamics analysis of EPS system
EPS系统的输出轴子模型为

式中:Je为输出轴的转动惯量;Be为输出轴的阻尼系数;Tw为作用在输出轴上的反作用转矩。
EPS系统的齿条子模型为

式中:mr为齿条及小齿轮的等效质量;Br为齿条的阻尼系数;xr为齿条的位移;rp为小齿轮半径;FTR为轮胎转向阻力及回正力矩等作用于齿条上的轴向力。
根据以上各式,可得


2 侧风干扰下整车动力学模型
假定侧向风的作用垂直于汽车直线行驶方向,在通常情况下,汽车行驶过程中受到由行驶速度产生的行驶风和自然风的合成作用,假定自然风作用方向垂直于直线行驶汽车的预定方向。为分析侧风对汽车运动的影响,设行驶风速度为v,自然风速度为w,合成风速度为vr,其方向与汽车纵轴线的夹角为 τ,称为流入角,如图2 所示[5]。
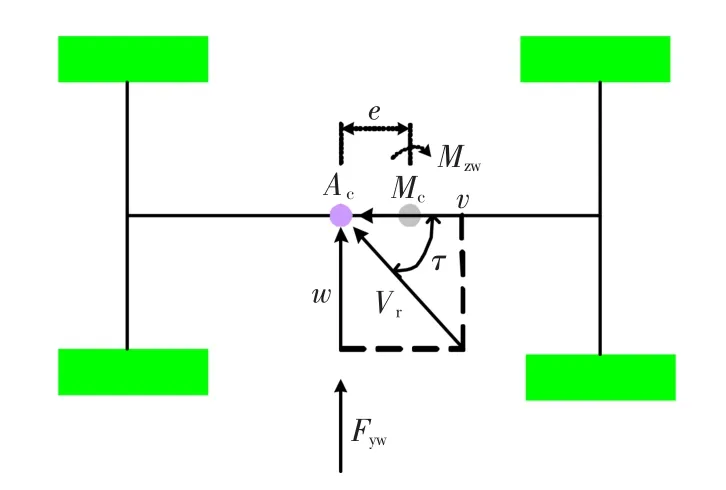
图2 侧向风作用Fig.2 Anti-wind effect
侧风产生的气动力称为侧风力,以Fyw表示,其作用在风压中心Ac上。由于风压中心一般不与质心Mc重合,其距离记为力臂e,引起横摆力矩Mzw;如果风压中心位于质心前,则横摆力矩将使汽车顺风横摆,对行驶稳定性不利。侧风力与横摆风力矩与合成风速度平方成正比[8],有

式中:Mzw取绕汽车质心逆时针方向为正;A为汽车迎风面积;ρ为空气密度;Cy为迎风角决定的侧风力系数。
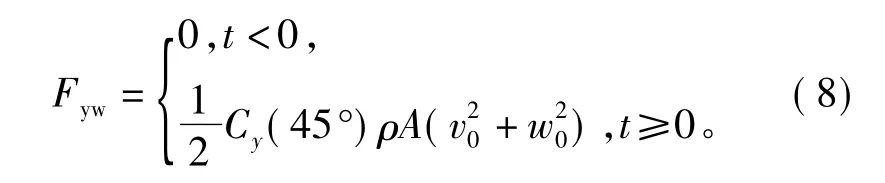
当汽车以60 km/h速度经过风速为60 km/h的侧风带时,取侧风力系数Cy(45°)=0.9,选取空气密度ρ=1.225 0 kg/m3,汽车正面投影面积为A=5.355 m2,阶跃风的数学表达式为
汽车在外界干扰作用下的整车转向动力学模型如图3所示,为便于掌握操纵稳定性的基本特性,把整车的转向模型简化成二自由度的汽车模型。
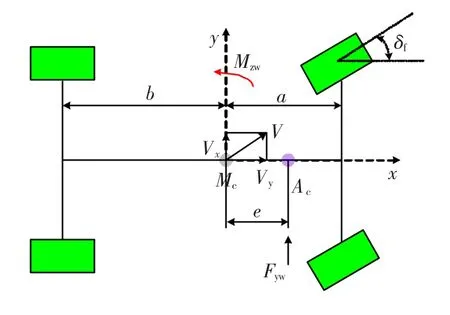
图3 侧风干扰下整车动力学模型Fig.3 Full vehicle dynamics under anti-wind interference condition
此模型以前轮转角为输入,汽车只作平行于地面的平面运动,忽略左右车轮由于载荷变化而引起的轮胎特性的变化,左右转向角相等。假设汽车在水平路面上的速行驶度为v,侧风作用于车体右侧,风压中心位于质心前e处,根据牛顿第二定律,其动力学方程为
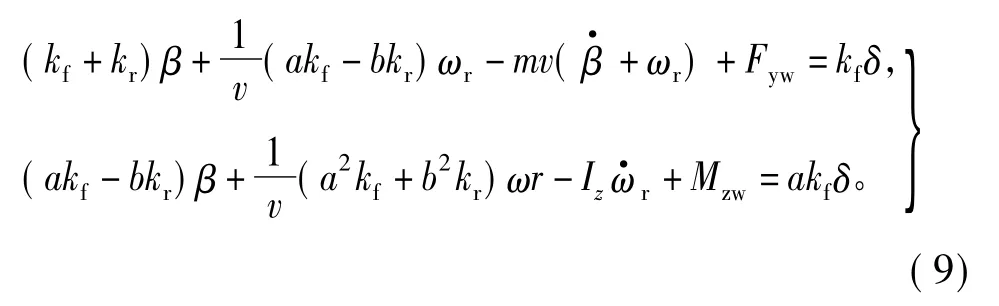
式中:m为汽车质量;a为前轮到质心的距离;b为后轮到质心的距离;Iz为汽车绕z轴的转动惯量;β为质心侧偏角;δ为前轮转角;ωr为汽车横摆角速度;Kf为前轮侧偏刚度;Kr为后轮侧偏刚度;V为汽车行驶速度;Fyw为侧向干扰风;Mzw为侧向干扰风横摆力矩;Mc为汽车质心。
取状态变量为 X2=[β ωr]T,输入为 U2=[Fywδ],输出为 Y2=[β ωr]T,得到系统的状态方程和输出方程为

上述模型中的主要参数:整车整备质量M=900 kg;最大总质量 Ms=1 330 kg;前轮轮距 a=1 360 mm;后轮轮距b=1 355 mm;整车绕z轴转动惯量Iz=1 591.2 kg·m2;悬架上质量绕x轴的转动惯量Ix=293 kg·m2;前轮侧偏刚性2k1=35000 N/rad;后轮侧偏刚性2k2=35 000 N/rad;侧倾力臂h=0.5 m;电动机转矩系数CT=0.02 N·m/A;电动机的反电动势常数Kb=0.02 Vs/rad;助力机构传动比G=16.5;电动机电枢电阻 R=0.1 Ω;电动机电感L=0.01 H;方向盘转动惯量Js=0.001 2 kg·m2;方向盘阻尼系数Bs=0.261 N·m·s/rad;扭杆刚性系数Ks=90 N·m/rad;小齿轮半径rp=0.007 8 m;电动机转动惯量Jm=0.000 47 kg·m2;电动机阻尼系数Bm=0.003 34 N·m·s/rad;电动机输出轴刚性系数 Km=90 N·m/rad;侧向风作用力臂 e=0.4 m。
3 反助力控制策略设计及仿真分析
侧风干扰情况下EPS反向助力控制策略如图4所示,理想的助力特性应该能充分协调好转向轻便性与路感的关系,并且助力后的效果应该与驾驶员手动转向的感觉一致。由于直线型助力特性简单、数据量小、存储方便,有利于控制系统的设计,在实际中容易调整,设计如图5所示的反向助力策略助力特性[5]。
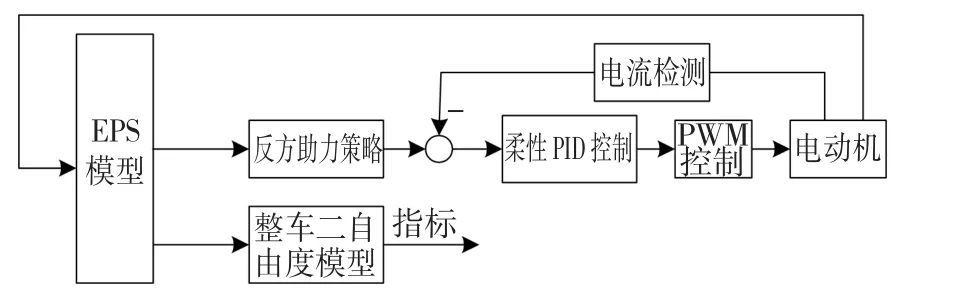
图4 汽车EPS反阻力控制策略Fig.4 Reverse assistance control strategy of EPS system
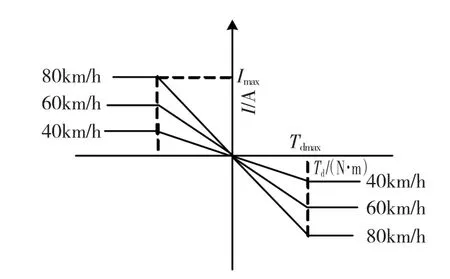
图5 反向助力控制策略助力特性Fig.5 Characteristic of reverse assistance control strategy
图5中

反向助力策略的电机助力电流与方向盘转矩反向,电机的输出转矩阻碍方向盘转动,进而阻碍前轮偏转;在同样的风速下,汽车车身所受侧向风力随车速的增大而增大,高速时因车轮所受地面摩擦较小,侧风可造成较大的不稳定性,因此在高速时采用比中低速更大的助力;由于汽车低速时所受侧向风力较小,加之路面摩擦加大,侧向位移不明显,因此将助力区域设于40 ~80 km/h的中高速区间[6-7]。
常规PID参数整定的过程存在着系统稳定性与准确性之间的矛盾,为解决控制系统的稳定性与准确性的矛盾,以及增强系统对不确定性因素的适应性、鲁棒性,设计柔性PID控制方法,根据当前误差的大小,判断系统误差所在的运行状态,实时调整控制器结构和控制参数。柔性PID控制参数变化规则如表 1 所示,Kp,1、Kd,1、Ki,1为 PID 控制器初值,a∈(0,1)、b∈(0,1)、c∈(0,1)、m∈(0,1)为调节参数,并且m<b。

表1 柔性PID控制器参数变化规则Table 1 Parameter rules of flexible-PID control
对EPS反向助力控制的人-车系统进行仿真,输入为电机控制的前轮转角以及阶跃侧向风,分别在无助力、正向助力和反向助力3种情况下进行仿真比较。设定车速为40 km/h,侧向风风速为60 km/h,此时汽车所受侧向风力为620 N,系统响应见图6和表2、表3所示。

图6 汽车响应仿真分析Fig.6 Simulation analysis of vehicle response

表2 汽车响应的峰值仿真分析Table 2 Peak response analysis of simulation
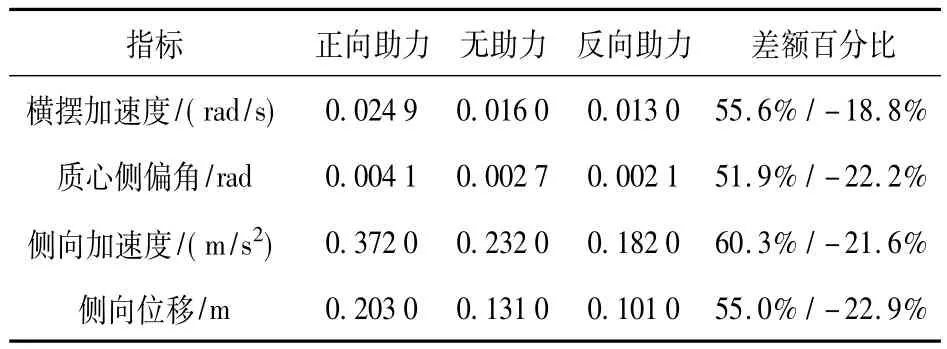
表3 汽车响应的平均值仿真分析Table 3 Average response analysis of simulation
结果表明,车速为40 km/h时,侧向风作用的过程中,正向助力策略对方向盘施加与侧风同向的转矩,增加了前轮的偏转,其助力特性决定了此速度时正向助力较大,与无助力情况相比,上述的4个指标均有60%左右的增幅,加剧了车身的不稳定性;与无助力情况相比,横摆角速度、质心侧偏角、侧向加速度和侧向位移均有20%左右的削弱;反向助力策略阻碍了前轮的偏转,使得汽车行驶更加稳定。
4 实车试验及分析
在现有的条件下,选用水力来模拟风力,将水通过高压水枪喷射到车身上模拟侧风对汽车的作用力,如图7所示,设定试验车速为40 km/h,汽车在宽度大于6 m,长度大于50 m的平整路面上沿预先画好的直线行驶;采用开环试验方法,在距离高压水枪作用前2 s处,松开方向盘;高压水枪垂直于车身行进方向,距离汽车3 m,水流作用在预先标记好的风压中心上;试验过程中,采集横摆角速度和侧向加速度的峰值和平均值,测量汽车的侧向偏移[8-9]。
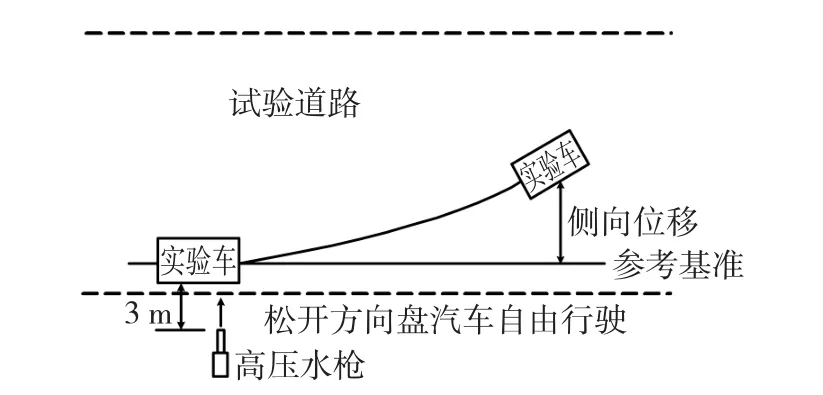
图7 侧风干扰试验Fig.7 Tests under anti-wind interference condition
试验结果如图8和表4、表5所示,经多次重复试验,用卷尺在停车处测量汽车中轴线到参考基准的平均侧向位移分别为正向助力控制1.38 m、无助力控制0.85 m和反向助力控制0.5 m。结果表明,正向助力控制恶化了汽车的稳定姿态,加大了横摆、侧向加速度以及侧向位移;与无助力控制相比,反助力控制的横摆角速度、侧向加速度的峰值与平均值得到28% ~32%的削弱,侧向位移得到41%的削弱,显著改善了汽车的稳定姿态,在侧风干扰下,反向助力控制具有更好的操纵稳定性。

图8 侧向干扰下车身响应试验结果Fig.8 Body response under anti-wind interference condition

表4 试验结果的峰值比较分析Table 4 Peak response analysis of tests
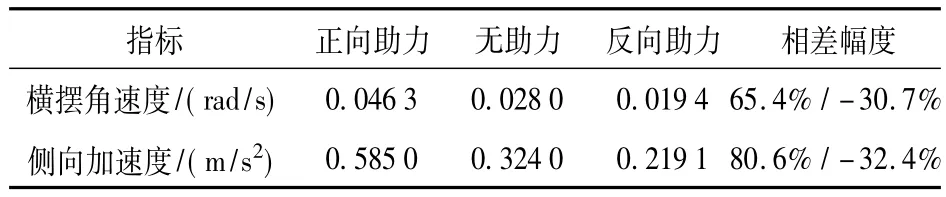
表5 试验结果的平均值比较分析Table 5 Average response analysis of tests
5 结论
1)反向助力策略通过电动机进行反向助力,在驾驶员无输入情况下实现主动转向控制,阻碍前轮的偏转,削弱横摆角速度、质心侧偏角、侧向加速度和侧向位移,显著改善汽车的稳定姿态。
2)考虑侧风干扰的电动汽车EPS系统反向助力控制及试验对EPS系统控制策略的开发、功能的增强和优化以及转向操纵安全的提高具有重要的工程应用意义。
[1] 管欣,宗长富,王化吉.汽车底盘动力学性能主观评价研究现状与展望[J].汽车工程学报,2011,1(3):159 -174.GUAN Xin,ZONG Changfu,WANG Huaji.Current situation and prospect of research on subjective evaluation of vehicle chassis dynamics performance[J].Chinese Journal of Automotive Engineering,2011,1(3):159 -174.
[2] NAGAI Masao.Perspectives of research for enhancing active safety based on advanced control technology[J].Journal of Automotive Safety and Engergy,2010,1(1):14-22.
[3] 赵景波.汽车EPS混杂控制系统理论、设计及实现研究[D].镇江:江苏大学汽车与交通工程学院,2009:105-107.
[4] 赵景波,周冰,李秀莲,等.电动汽车EPS曲线型助力特性的设计及试验[J].电机与控制学报,2011,15(12):96-102.ZHAO Jingbo,ZHOU Bing,LI Xiulian,et al.Design and test of curved assist characteristic for electric vehicle EPS system[J].E-lectric Machines and Control,2011,15(12):96 -102.
[5] 陆地,李甲锋,王建信.一种高可靠性直流无刷电机调速装置[J].哈尔滨理工大学学报,2011,16(6):46 -49.LU Di,LI Jiafeng,WANG Jianxin.A highly reliable brushless DC motor speed control device[J].Journal of Harbin University of Science and Technology,2011,16(6):46 -49.
[6] ZHAO Jingbo,BEI Shaoyi,ZHANG Lanchun.On reverse control strategy and anti-wind disturbance analysis of automotive EPS system[J].Applied Mechanics and Materials,2011(39):529 -534.
[7] 赵景波,周冰,贝绍轶.电动汽车 EPS系统阻尼工况 Bang-Bang-PID 控制[J].电机与控制学报,2011,15(11):96 -100.ZHAO Jingbo,ZHOU Bing,BEI Shaoyi.Bang-Bang-PID control of automotive EPS system under damping condition[J].Electric Machines and Control,2011,15(11):96 -100.
[8] 袁朝春,陈龙,江浩斌,等.车辆电动助力转向系统试验研究测试方法:中国,200710190076.5[P].2007-11-16.
[9] 《汽车工程手册》编辑委员会.汽车工程手册(试验篇)[M].北京:人民交通出版社,2001:252-277.