十字路口智能交通灯控制系统的FPGA实现
2012-04-24王维松王金生
王维松,王金生,章 伟,梁 齐
(1.合肥工业大学电子科学与应用物理学院,安徽合肥 230009;2.南京工业大学化学化工学院,江苏南京 210009)
汽车已经逐渐成为了人们日常生活中最主要的交通工具。但是,城市基础设施建设特别是城市交通道路的发展速度却满足不了汽车数量增长的需求,这就使城市交通拥堵现象越来越严重,车辆通行速度成为了城市发展的瓶颈[1-2]。在加强城市基础建设的同时,改善十字路口的交通信号灯运行模式,提高十字路口的通行效率,对缓解城市交通堵塞有着重要的现实意义。而目前城市的交通灯控制,是根据一定时间段的各车道车流量的调查而分配出的相对合理的固定红绿灯转化周期。但在特定的时间段,会出现某一方向车辆早已通行完,而另一方向车辆排队等绿灯的情况[3],这严重降低了实际的十字路口交通效率。
文中采用硬件描述语言VHDL设计了一种新型十字路口交通灯控制系统,其主控系统是Altera公司Cyclone系列 FPGA 芯片 EP1C6Q240C8[4]。该系统利用环形线圈感应车辆,通过无线发射/接收模块把信号传输到核心控制芯片进行处理,实时输出相应的红绿灯控制信号,从而动态调节各方向的通行时间,实现十字路口的车辆通行效率的最大化[5]。
1 系统结构简介
系统基本框图如图1所示,它分为车流量检测部分、交通信号控制部分和信号显示部分。在车流量检测部分,通过环形线圈传感器采集车辆信号,通过A/D转换器、信号放大电路和无线发射/接收模块,将采集到的信号转化为数字信号传输到交通控制部分,经过FPGA控制芯片的分析和处理,输出实时的红绿灯控制信号,并将控制信号显示在相应的红绿灯上,从而优化十字路口各车道的车辆通行效率[6]。
如图2所示,在十字路口的直行道和左转道口安装环形线圈感应该车道是否有车辆停留[7],人行道通行与否由相邻直行道红绿灯状况确定,若绿灯,则人行道为通行状态,反之亦然;右转方向信号灯状态由相关人行道信号灯状态决定,若人行道为通行状态,则右转方向为红灯,反之,则为绿灯。
2 传统交通控制系统状态分析
当前大部分十字路口的交通控制系统模式,都是根据道路交通状况,事先设定好的红、绿、黄色信号灯时间,来控制整个交通岔路口的车辆通行。目前最普遍的交通控制系统信号灯变化的基本模式如图3所示[8]。

图1 系统基本框架

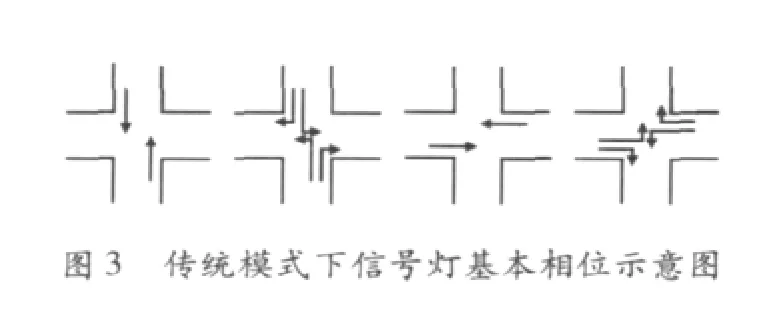
根据此模式下信号灯相位的基本要求,设定直行方向绿色信号灯时间为24 s,左转、右转方向绿色信号灯时间为6 s,黄色信号灯时间统一为3 s。其自动运行状态如表1所示。
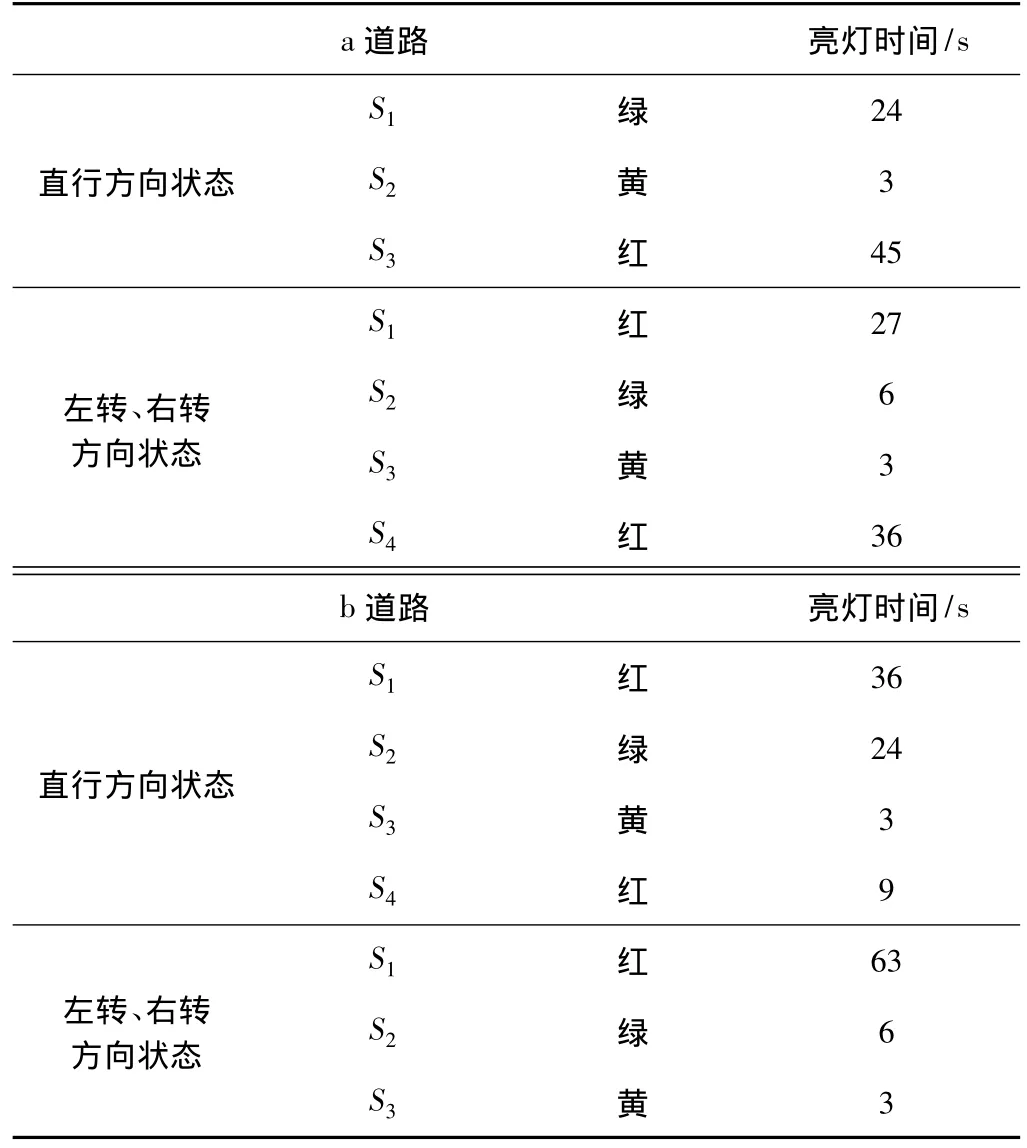
表1 交通灯状态转换表
从状态转换表可以看出,以a道路直行方向信号灯状态S1为出发点,3种颜色信号灯不断循环,显示时间为S1+S2+S3=72 s,即为交通控制系统的一个周期时间。通过计算,可得a道路直行方向绿灯时间概率为24/72=33.33%,左转、右转方向绿灯时间概率为6/72=8.33%,b道路状态与a道路相同。无论十字路口车流量状况如何,传统模式下的各个路口和方向的车辆通行概率保持不变。
3 智能交通控制系统仿真
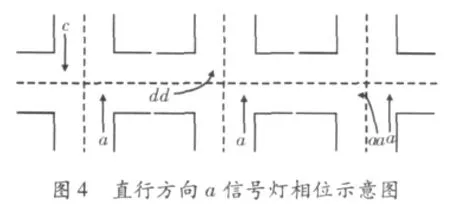
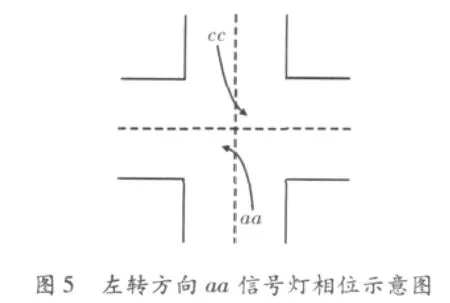
智能交通控制系统相对于传统的交通控制系统,最大的创新点在于,实现了车辆通行相对方向不同步的信号控制,它会根据车流量的变化及时调整交通信号控制策略,最大限度提高了十字路口车流量的通行效率。整个控制电路包括了两个控制模块:直行方向控制模块与左转方向控制模块,右转方向和行人通行时间由直行方向控制模块概括。控制程序运行时,两个模块交替运行,进行循环控制。直行4个方向与左转4个方向的信号相位分别一致。例如,a方向具体相位如图4所示。aa方向具体相位如图5所示。
控制电路以1 Hz时钟脉冲作为系统时钟,它包含了8路输入信号和48路输出信号[9],具体信号分布如表2所示。

表2 控制电路输入、输出信号列表
系统主要适应十字路口车流量不均衡的状态,设定十字路口车流量状况为a车道、b车道车流量大,c车道、d车道车流量小,如图6所示。利用EDA软件Quartus II 7.2,通过硬件描述语言VHDL进行模拟设计和仿真[9],可得此状态下智能交通控制系统的仿真结果,如图7所示。

图6 十字路口车流量不均衡示意图

图7 车流量不均衡状态下智能交通控制系统仿真结果示意图
统计图7中100 s内a车道、b车道3种车辆通行方向的车辆通行时间,可得a车道、b车道直行方向车辆通行平均概率为(50+40)/200=45%,a车道、b车道左转、右转方向车辆通行平均概率为(46+18+50+57)/400=42.75%。
比较传统模式下的交通控制系统和智能交通控制系统在十字路口车流量不均衡状态下的车辆通行概率,可以发现,道路直行方向的车辆通行概率从33.33%提升到了45%,道路左转、右转方向的车辆通行概率从8.33%提升到了42.75%。因此,在车流量不均衡的情况下,本智能交通控制系统相对传统模式下的交通控制系统,提高了十字路口的车辆通行效率,也满足了预期的设计要求。
4 硬件设计与测试
完成了智能交通控制系统的设计、编译、仿真后,将设计程序中输入、输出端口进行引脚绑定并下载到开发板上EP1C6Q240C8核心芯片中。制作外围电路如图8所示,并4路直行方向绿灯信号和4路左转方向绿灯信号接入到开发板上的8个数码管上,调整外围电路的输入电压,观察数码管状态。通过实际测试,8个数码管的显示结果正常,运行稳定、可靠,达到了设计要求。

图8 外围电路的原理图
5 结束语
利用EDA软件Quartus II 7.2,采用硬件描述语言VHDL进行编程,实现了智能交通控制系统的设计、仿真,并利用EP1C6Q240C8 FPGA芯片制作成控制系统进行测试,实现了对交通信号灯相对方向不同步的控制功能,可在实际应用中提高城市十字路口的车辆通行效率,缓解城市的交通压力。本设计具有设计效率高、成本低、可靠性强、维护容易及可扩展性强等优点,展现了EDA技术和FPGA器件在智能交通控制方面应用的优越性。
[1] TU Xiaoku.The research of intelligent timing control system for urban traffic signal light[C].Ningbo Univ.of Technol.,Ningbo,China:2011 International Conference on Consumer Electronics,Communications and Networks,CECNet,2011:5425-5428.
[2] THOMAS WINTERS.LITS:Lightweight intelligent traffic simulator[C].Univ.of Central Arkansas,Conway,AR,USA:International Conference on Network-Based Information Systems,NBIS'09,2009:386 -390.
[3] 陈姚节,黄小童,张玉浩.基于CPLD的交通信号灯设计[J].教育教学论坛,2011(23):62 -63.
[4] EL-MEDANY W M,HUSSAIN M R.FPGA -based advanced real traffic light controller system design[C].Univ.of Bahrain,Sakhir:Intelligent Data Acquisition and Advanced Computing Systems:4th IEEE Workshop on Technology and Applications,2007:100 -105.
[5] 王国海.基于MSP430F149的路口交通灯智能控制系统的研制[J].计算机应用与软件,2011,28(2):65-66,108.
[6] 曹元军,周志成,徐伟,等.基于无线传感器网络的交通信号灯控制[J].计算机与信息技术,2007(4):105-106,110.
[7] 王正勇.基于FPGA的交通信号控制器的设计[J].电子测量技术,2008,28(10):188 -190.
[8] 周春蕾.基于FPGA技术交通灯智能控制系统的研究[D].河北:河北科技大学,2010.
[9] 王永强.基于FPGA的交通灯控制器的设计[J].中国对外贸易:英文版,2011(12):426.
