舰炮一维弹道修正弹射击误差分离和校正研究*
2012-04-24汪德虎余家祥王连柱解维河
黄 义,汪德虎,余家祥,王连柱,解维河
(海军大连舰艇学院,辽宁 大连 116018)
一维弹道修正弹是为了提高密集度而采用阻力修正原理进行纵向距离修正的一种低成本弹药[1],作战效费比高、发展前景大。由于该弹工作原理与传统无控弹不同,射击诸元不仅包括发射诸元还包括修正诸元,仅改变发射诸元的传统射击校正方法[2]不再适用于一维弹道修正弹。为提高舰炮使用一维弹道修正弹射击精度和作战效能,必须针对该弹工作原理,分析射击误差,研究射击校正新方法。
1 舰炮使用一维弹道修正弹射击原理
舰炮使用一维弹道修正弹射击的原理是:在目标(或提前点)基础上增加射程扩展量进行射击诸元计算,以实现射击预定弹道远于目标(或提前点),跟踪雷达测量一段外弹道参数,火控设备进行弹迹滤波,预测弹着点,并求出其与目标(或提前点)偏差,解算射程修正量,形成修正指令,指令发送装置向飞行中的修正弹发送修正指令;弹上修正执行机构控制阻力环适时张开,实现打远修近[3]。其工作过程如图1所示。
图1中,坐标系O-XYZ为以发射点为原点的相对地球静止的直角坐标系,Si(i = 1,2,3,…)为发射后雷达所在位置,表示雷达测量的弹道坐标向量,用虚线表示的未修正弹道是指如果执行机构不工作的一段弹道。
2 射击误差和射击观测
2.1 射击误差
根据舰炮使用一维弹道修正弹的工作原理,射击误差主要包括预测误差和修正误差。预测误差指火控设备预测如果修正机构不工作的弹着点误差,主要包括雷达测量外弹道坐标误差、我舰状态误差、不开环状态弹道系数误差和气象误差等。其中,我舰状态误差是指摇摆角测量误差和航速航向测量误差,雷达测量外弹道坐标是相对量,需要由火控设备进行坐标转换和弹迹滤波,所以,我舰状态误差影响外弹道坐标精度。修正误差指修正机构的工作误差,主要包括阻力环张开时间误差[4]和开环状态弹道系数误差。

图1 舰炮发射修正弹工作过程示意图
2.2 射击观测
射击校正需要通过射击观测获取误差值,舰炮使用一维弹道修正弹射击误差的获取较传统无控弹困难。如图2所示,O点为发射点,OX表示射击方向,P点为目标(或提前点),C点为实际的修正执行机构工作的观测弹着点,Sn点为火控设备根据雷达测量的一段弹道坐标预测修正执行机构不工作的弹着点,Cn点为假设修正执行机构不工作的实际弹着点。向量CnSn即为火控设备预测如果修正机构不工作的弹着点误差,由于无法直接获取Cn点位置,所以,预测误差CnSn无法直接获取;SnP为预期的修正量,CnC为实际修正量,所以,修正误差为(CnC-SnP)=(CnSn-CP),其中,误差CP可以通过射击观测获取。但是,由于无法直接获取预测误差CnSn,所以,修正误差亦无法直接获取。

图2 预测误差和修正误差示意图
3 射击校正方法
根据舰炮使用一维弹道修正弹射击原理、误差组成和射击观测特点,本文提出先校正预测误差、再校正修正误差的射击校正方法。
3.1 校正预测误差
获取预测误差的方法是,修正执行机构不工作,发射n发弹,逐发预测弹着点,逐发观测弹着点,将观测弹着点与预测弹着点偏差平均值作为预测误差。如图3所示,O点为发射点,OX表示射击方向,S点为预测弹着点,C为观测弹着点,SC为预测弹着点误差;P点为目标(或提前点),与预测弹着点不重合。

图3 提前点、预测弹着点、观测弹着点示意图
校正预测误差的方法是,修正执行机构正常工作,将火控设备预测弹着点减去通过执行机构不工作获取的预测误差作为新的预测弹着点。
3.2 校正修正误差
校正修正误差原理是:由于舰炮使用一维弹道修正弹射击误差包括预测误差和修正误差,所以,校正预测误差后,观测弹着点相对目标(或提前点)误差仅为修正误差,取前n发观测弹着点相对目标(或提前点)误差的平均值作为修正误差,校正后续射弹射程修正量,形成修正指令,可以提高后续弹射击精度。
获取修正误差的方法是,修正执行机构正常工作,发射n发弹,逐发校正预测误差,逐发观测弹着点相对目标(或提前点)偏差,取其平均值作为修正误差。校正预测误差后,图2中的Sn点和Cn点重合,如图4所示,SnP为修正量的理论值,SnC为实际修正量,修正误差为(SnC-SnP)=-CP,可以通过射击观测获取。图2中为远弹,修正误差为负值,表示修近了。
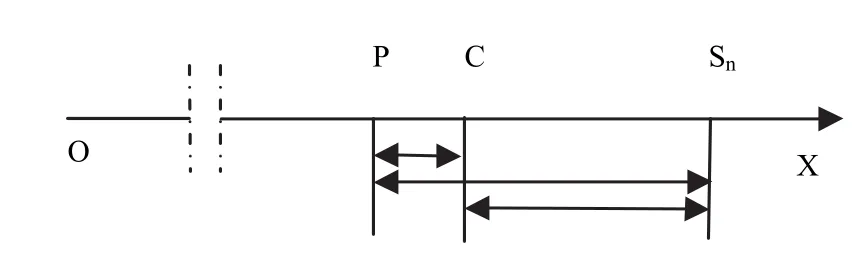
图4 修正误差示意图
校正修正误差的方法是,获取修正误差后,逐发发射修正弹,逐发预测执行机构不工作的弹着点,求出与目标(或提前点)的偏差,减去修正误差作为射程修正量,形成修正指令。
4 弹道模型
一维弹道修正弹预测修正机构不工作的弹着点以及根据射程修正量形成修正指令采用的弹道模型为[4-5]:

式中,C为弹道系数,阻力环闭合状态和张开状态取不同的值,空气密度函数,τ表示虚温,y表示弹道高,气压函数,p(y)表示“气压函数”,p0N表示“标准气压”,表示“标准阻力系数”,马赫数Ma=V/cs,,g表示“重力加速度”,Wx表示纵风,V为弹丸在弹道切线方向上的速度,Vx和Vy为V在水平和垂直方向上的速度分量。
5 仿真计算
以某型一维弹道修正弹为例,对射程 25km、纵深为50m的目标发射100发炮弹,采用Monte-Carlo法仿真10000次。雷达测距误差均值和均方差为10m,测角误差均值和均方差为 1.0mrad;舰艇摇摆角测量误差均值和均方差为1.0 mrad,舰艇航速测量误差均值和均方差为 0.8kn,舰艇航向测量误差均值和均方差为1.0 mrad;阻力环打开时间误差均值和均方差为1ms;弹道系数误差均值和均方差为标准值的 0.5%;虚温误差均值和均方差为 0.1°K,气压误差均值和均方差为0.1%p0N。校正预测误差和校正修正误差均采用4发弹误差平均值。不进行射击校正和按本文方法射击校正距离上命中弹数的均值和均方差以及命中概率如表1所示。

表1 不校正和校正命中弹数对比表
从表1可知,按本文方法射击校正,校正后能够提高命中概率。
6 结束语
舰炮使用传统无控弹射击校正方法不适用于舰炮使用一维弹道修正弹,本文根据舰炮使用一维弹道修正弹工作原理,分析射击误差构成和射击观测特点,将射击误差分为预测误差和修正误差,首次提出先校正预测误差、后校正修正误差的射击校正方法,仿真证明采用本文的射击校正方法能够显著提高射击精度。
[1]史金光,王中原,等.一维弹道修正弹气动力计算方法和射程修正量分析[J].火力与指挥控制,2010,35(7):80-83.
[2]汪德虎,戴耀,王建明.舰炮弹道观测校正研究[J].弹道学报,2002,14(2):48-51,56
[3]王中原,史金光,李铁鹏.弹道修正中的控制算法[J].弹道学报,2011,23(2):19-21,27
[4]陶陶,王海川.一维弹道修正弹阻力环修正控制算法研究[J].指挥控制与仿真,2009,31(3):88-90.
[5]韩子鹏.弹箭外弹道学[M].北京:北京理工大学出版社,2008.
