基于微型无人机的全自动三维重建方法实验
2012-04-19王海英胡震天刘容
王海英,胡震天,刘容
(南宁市勘测院,广西南宁 530022)
基于微型无人机的全自动三维重建方法实验
王海英∗,胡震天,刘容
(南宁市勘测院,广西南宁 530022)
针对测绘无人机应急响应能力较差的局限,基于微型无人机系统,设计灵活机动的地理信息快速获取流程,利用MAV平台获取的超低空影像进行全自动大场景三维重建的实验。方法分3个步骤,包括提取特征点并匹配,计算相机姿态参数,多视立体重建生成3D模型。最后,对 0.2 km2测区进行了MAV航拍得到154张照片,全自动生成DOM、DSM及纹理贴图场景3D模型,实验结果表明了本文方法的可行性和有效性。
MAV Multi-view stereo;3D reconstruction;DAISY
1 引 言
高空遥感影像近年来已成为空间数据获取的重要数据源。主要以卫星遥感和普通航摄技术为主的绘图手段,往往暴露出数据获取能力不足和现势性差等技术局限。测绘无人机以低成本,高精度,操作简便等特点,在测绘、数字城市建设、灾害应急处理、重大工程建设、国土监察等领域拥有独特的优势。而国内无人机系统大多面向测绘,设备专业、精度高,但部件繁多、体积庞大、工业制造集成度不高、应急响应能力较差[1]。得益于MEMS姿态传感电子器件的普及应用(iPhone 4等智能手机均内置MEMS三轴陀螺仪)以及相关技术的快速发展,近年出现了多种微型无人机系统(Micro Air Vehicle,MAV),成为灵活与便捷的超低空影像获取平台。

图1 Gatewing X100微型无人机
MAV具有体积小巧、重量轻、集成度高、响应快速及作业灵活等特点。例如比利时Gatewing公司[2]推出的测绘无人机X100,其重量不到 2 kg,如图1所示。X100采用弹射起飞,滑行降落方式,对起降条件限制很小,能够适应小区域突发事件的快速反应。由于机上载荷的限制,只能搭载普通数码相机,而非专业数码相机,这就给相应的数据处理技术方法带来了很高的挑战性。因此,本文就微型无人机搭载便携数码相机获取的超低空影像全自动三维重建方法进行实验。
2 MAV遥感影像获取平台
MAV系统用于遥感影像获取的主要特点是高度灵活性,能够从各种不同的超低空视角获取高分辨率的数码照片;此外由于微型无人机系统本身的翼展、起飞重量局限了其飞行姿态的稳定性,照片会呈现无规律的较大角度差异;对于低价位的自驾仪[3],甚至无法提供每一张照片拍摄时候对应的粗略GPS、姿态数据。这些特点使得目前的无人机航测流程难以直接应用于微型无人机搭载便携DC获取的照片集。
本文实验采用广西大学计算机与电子信息学院正在研制中的微型无人机——慧视I型MAV系统,搭载的便携数码相机为Panasonic LUMIX LX3,照片分辨率377 6×252 0像素,使用焦距24 mm超广角,获取的影像数据如图2所示。

图2 慧视I型MAV系统获取的影像数据
3 全自动三维重建方法
全自动三维重建方法分为3个步骤,首先对图像进行特征点提取并匹配,接着通过运动获取结构(Structure from motion,SFM)分析计算得到相机标定信息,然后进行多视立体重建(Multi-view stereo,MVS)生成表面格网模型,最后得到三维立体纹理模型。

图3 全自动三维重建方法框图
3.1 特征点提取与匹配
特征点提取的方法有Harris角点、SIFT和SURF等。本实验采用改进的SIFT方法[4]提取特征点,SIFT特征点具有尺度不变、旋转不变和光照不变的特点,有着很好的鲁棒性,非常适合用于宽基线匹配,因此能够一定程度的适应MAV采集图像姿态不稳定的问题。特征点匹配过程使用KD树提高搜索效率,同时采用由粗到精的匹配策略,以处理冗余度较高的数码照片集。
3.2 运动获取结构分析
SFM已经成为计算机视觉领域的所谓黄金标准技术[5],基于照片间特征点匹配关系,使用非线性优化方法回算相机参数及稀疏三维点云。本文实验采用与文献[6]相似的贪婪搜索SFM方法,采用递进的方法在RANSAC过程中逐台加入相机,初始相机对的标定采用五点法[7]确定稳定初值,避免非线性收敛到局部极值,得到错误相机标定结果。
3.3 多视立体三维重建
MVS是近年发展很快的计算机视觉技术,由已标定的多视角照片进行三维重建,目前比较好的方法有基于面片、基于法向量[8]和深度图融合的方法[9]。本文采用深度图融合的三维重建方法,其关键在于确定立体图像对进行深度图恢复,并将可靠性高的多深度图融合得到密集三维点云,以下阐述具体过程。
给定一图像对,Yi=(Is,It),其基线应该相对较大,使用DAISY描述子[10]沿对极线量测相识度,并计算稠密深度图。DAISY是由一系列梯度直方图串联组成,其计算先是分多个独立方向进行梯度计算,再将每个方向的梯度模值综合起来形成方向直方图,该计算过程可通过对各方向梯度进行不同尺寸的高斯滤波和简单阈值化实现。DAISY得到和SIFT直方图计算过程相类似的不变性,但其效率高很多,适合对图像逐个像素点计算描述子,因此非常适合用于密集匹配生成深度图。
为提高计算效率,直接使用DAISY匹配度分值来计算一幅图像中像素x拥有深度d的概率:

为决定是否将一个深度值赋给某个像素,沿对极线均匀采样选出最大概率前两位,并计算两者比值:

当RX大于某个阈值时,该深度值被认为是有效的,本文所有实验采用的阈值均为0.75,结果显示产生的3D点外点比较少。生成的稠密点云,经过泊松重构的方法能够生成3D表面格网模型。
4 实验结果
MAV设定航线自动飞行,拍摄区域在广西南宁市郊沙井某开发区,覆盖面积约 0.2 km2。搭载松下LX3数码相机,快门设置1/2 000 s,焦距24 mm,飞行相对高度 200 m,成图分辨率 0.1 m。航向重叠率70%,旁向重叠率40%,照片总数154张,图4所示为部分航拍照片。

图4 部分试验照片
SFM过程得到相机参数及稀疏三维点云,由图5可以看出微型无人机的飞行姿态不稳定,这是与一般航测无人机数据最大的不同,导致目前的无人机数据处理流程无法适用。图6所示为拼接影像及DSM,图7为DOM匀色前后对比,图8为进行纹理贴图后的3D模型。

图5 航拍照片姿态可视化示意图

图6 DOM与DSM
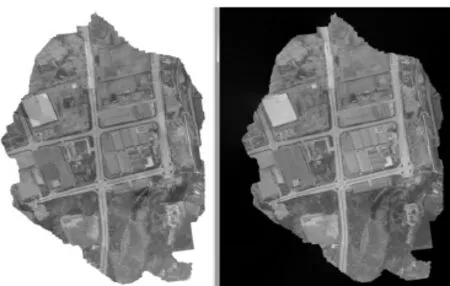
图7 DOM匀色前后对比

图8 纹理3D模型
5 结 论
本文针对测绘无人机应急响应能力较差的局限,基于微型无人机系统,设计了灵活机动的地理信息快速获取流程,进行了针对MAV平台获取的超低空影像进行全自动大场景三维重建的实验。实验共处理了154张1 000万像素的数码照片,自动计算每一张照片的姿态参数,筛选最佳立体像对进行DOM与DSM的自动生成,在此基础上最终得到纹理贴图三维模型。实验结果显示,本文数据处理流程能够顺利地完成整个三维重建过程,所得成果令人满意。未来工作将进行精度评估,以便将该技术更好地服务于测绘生产。
[1] 中国测绘科学研究院赴德国参加国际测绘技术与设备博览会的总结报告,2010.12
[2] Gatewing,http://www.gatewing.com/,2011.7
[3] 桂林飞宇科技公司,FY3ZT使用手册.2011
[4] Lowe,D.,Distinctive image features from scale invariant keypoint.Int.Journal of Computer Vision 60(2),2004,pp.91~110
[5] Hartley R I,Zisserman A.Multiple View Geometry in Computer Vision.Cambridge University Press,2004
[6] Hernandez Esteban C,Schmitt F,Cipolla R,Silhouette coherence for camera calibration under circular motion.PAMI 29,2007
[7] M.Goesele,N.Snavely,B.Curless,H.Hoppe,and S.M. Seitz,Multiview stereo for community photo collections.in ICCV,2007
[8] C.Strecha,R.Fransens,and L.V.Gool,Combined depth and outlier estimation in multi-view stereo.in CVPR,2006,pp.2394~2401
[9] D.Bradley,T.Boubekeur,and W.Heidrich,Accurate multiview reconstruction using robust binocular stereo and surface meshing.in CVPR,2008
[10] Tola,E.,Lepetit,V.,Fua,P.:Daisy:an efficient dense descriptor applied to wide baseline stereo.IEEE Trans.Pattern Anal.Mach.Intell.32(5),2010,pp.815~830
Research the Technology for Automatic 3D Map Rebuild Based on Mini-UAV
Wang Haiying,Hu Zhengtian,Liu Rong
(Nanning Exploration&Survey Institute,Nanning 530022,China)
For the limitations of the poor emergency response capability of mapping UAV,based on micro uav system,the design of flexible geographic information quickly get process,the automatic big scene 3D reconstruction for the micro low image acquired through the MAV platform is experimented in this article.It take three steps,including the extracting and matching feature points,calculating the structure parameters for camera and generating 3D model based on multi-view reconstruction.Finally,geting 154 imgaes from the 0.2 squar kilometers test area based on the MAV,and generating DOM,DSM and texture map scene 3D model automaticlly.The experimental result approve the feasibility and effectiveness of the method.
MAV Multi-view stereo;3D reconstruction;DAISY
2011—07—27
王海英(1977—),女,工程师,主要从事工程测绘及数据处理工作。
南宁市科学研究与技术开放计划项目(201002010A)
1672-8262(2012)01-42-03
P237
B
