中型组足球机器人全场定位系统的研究
2012-03-27耿小飞毛丽民庄梦秋夏德伟
耿小飞,毛丽民,庄梦秋,夏德伟
(常熟理工学院电气与自动化工程学院,江苏常熟 215500)
中型组足球机器人全场定位系统的研究
耿小飞,毛丽民,庄梦秋,夏德伟
(常熟理工学院电气与自动化工程学院,江苏常熟 215500)
针对基于两个特征点的全场定位中存在盲区、定位不够精确、不够稳定等缺点,提出了一种基于场线信息的全场定位方法,该方法Hough变换检测场线,并利用场线信息定义世界坐标系.在满足实时性要求的情况下,实现了精确,稳定的定位.
全向视觉;基于场线;全场定位
机器人足球世界杯(RobCup)是国际上一项为促进分布式人工智能、智能机器人技术及其相关领域的研究与发展而举行的大型比赛和学术活动[1-2].现在足球机器人自定位发展到综合利用全向视觉系统、里程计、加速度计、陀螺仪等多种传感器的信息融合定位方法[3].科尔曼滤波定位法、Markov定位法、粒子滤波定位法[4]等算法也得到广泛的应用.人工神经网络[5]和多传感信息融合技术[6]也为目标识别开辟了新的途径.
在RobCup比赛中,定位系统在足球机器人中是机器人导航的基本环节、重中之重,是解决其他问题的前提和基础,因为只有明确了自身位置,目标点才有意义,也才能在此基础上做出路径规划.本文主要研究了基于两个特征点的全场定位和基于场线信息的全场定位方法,目的是快速、准确地实现机器人的全场定位.
1 足球机器人全场定位的几何算法

图1 基于一个路标和一个角柱的全场定位示意图
1.1 基于两个特征点的全场定位
图1是基于一个路标和一个角柱的自定位.右门与地面接触的中点M(路标)的确定:先找出右侧球门区域,计算出它的中心坐标(x,y),它与机器人坐标系的原点连线,该直线上由蓝色向绿色过度的点就是点M.N点是角柱上黄色的区域,因为黄色的高度大致与全景镜面的高度差不多.由全景反射镜可以测得M,N与机器人的距离分别是r1,r2.M,N之间的距离近似等于球场宽度的一半.根据余弦定理可以得到

这样可以确定O点的坐标为(xN-r2sinθ,yN+r2cosθ).
目前基于全向视觉的足球机器人全场定位方法是利用球门,立柱等地表信息的几何三角定位方法[7].在比赛中,可以利用的地标特征较少,当地标被遮挡时,无法获得地标点的准确信息,这种定位方法误差较大.
1.2 实验结果
表1为基于一个路标和一个角柱的全场定位方法在光照条件为16盏60 W日光灯,无阳光直射的10.8× 7.2 m(实际场地的0.6倍缩放)的实验室场地中的实际测试结果.场上除去绿色场地、白色长线、红色球之外无其他干扰.
从表1的数据可以看出,这种方法有一个明显的缺点:机器人若偏离球场中央较大时,会存在较大的偏差,如表中的(50,50)点.另外,当机器人与定位点之间存在障碍物遮挡时,如表中(490,380),该点距离在中圈内,但由于测试时放置了障碍,导致该定位方法在该点存在盲区,定位结果也出现了较大误差.
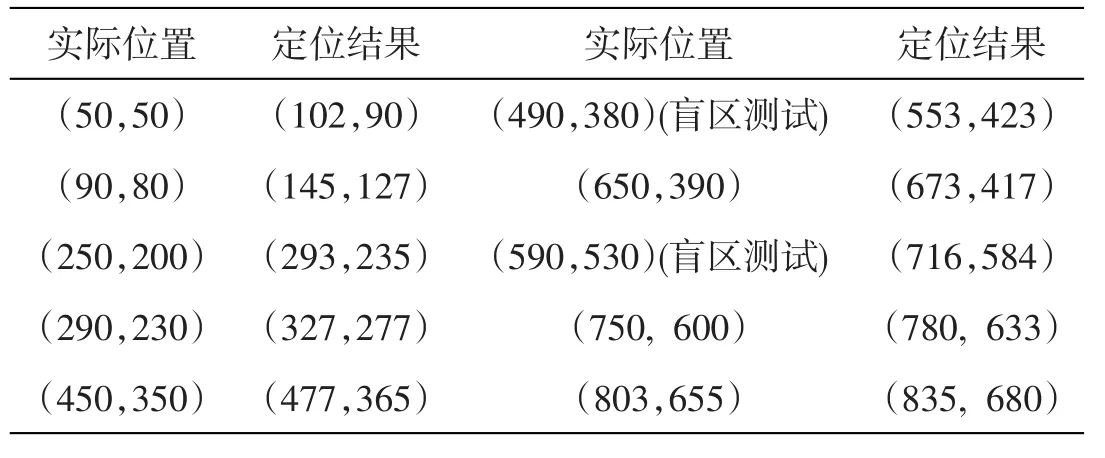
表1 基于一个路标和一个角柱的全场定位实验结果(单位:
2 基于场线信息的全场定位方法
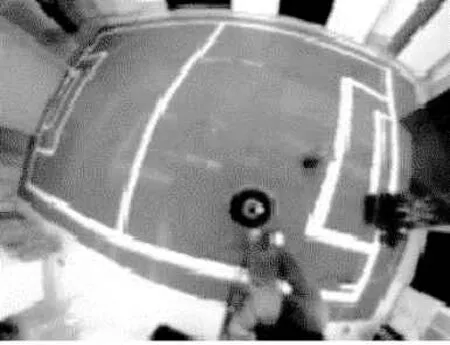
图2 预处理前图像
机器人全场定位是指机器人在世界坐标系中的位置和朝向信息,定位值用(x,y,θ)[8]表示,其中x,y表示机器人的位置坐标,θ表示机器人的朝向.机器人的场地中只有比较有限且对比强烈的几种颜色,如果能够快速地将白色场线从图像中提取出来并与环境的几何模型比较就能够实现机器人在场地上的实时全场定位.
由于全景相机加工精度等原因造成的误差,我们往往需要对获得的图像进行诸如去噪[9]、锐化等预处理[10].
从图2和图3可以看出,经过预处理后的图像具有更高的对比度与更加清晰的边缘,更有利于场线的提取.
2.1 利用快速Hough变换[11]检测场线
快速Hough变换的具体描述如下:
1)确定由m个特征点组成的图像空间P={pi=(xi,yi)|i=1,2,…,m};
2)按顺序依次从P中取出一个点pj作为种子点;
3)从由剩余特征点组成的点集P1={pi=(xi,yi)|i=j+1,2,…,m}中随机选择出特征点pk用于第4)和第5)步的运算,直至已随机选取的特征点数量达到P1中特征点数量的一定比例,则转第6)步;
4)计算

5)考虑一条直线上的任意两个点按照(1)式计算的结果一定相等,且一条直线至少需通过两个点,进行如下累积计算:如果θjl与已存在的所有θjl都不相等,即θjk与所有的θjl关系都满足|θjk-θjl|≥δ1,则新开一个累积存储单元H(θjk)←1,否则如果θjk与已存在的某一θjl的差距很小,即满足|θjk-θjl|<δ1,则H(θjl)←H(θjl)+ 1.回到第3)步;
6)获得具有最大累积数的累积存储单元,如果该H(θ)大于阈值T1,则认为可能存在一条过点pj的直线(ρ,θ),按下式计算直线参数:


图4 利用快速Hough变换检测场线的结果
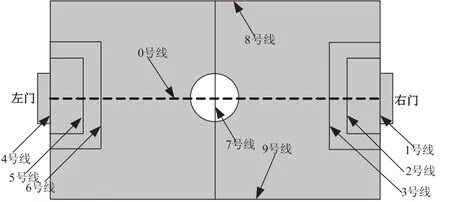
图5 世界坐标系
7)依次选取P中所有的特征点p=(x,y),将在可能的直线(ρ,θ)上即满足;
|xcosθ+ysinθ-ρ|<δ2的点从P中删除,如果被删除的点数目超过阈值T2,则确认该可能直线为图像上存在的直线.如果P中剩余特征点数目大于T3,则初始化累积存储空间,回到第2)步;
8)算法结束.
图4中红色的线是利用Hough检测场线的结果.从图中的情况可以看出利用Hough变换进行场线的检测可以得到很好的效果,为后续的坐标定位提供了有利条件.
2.2 判断检测得到的直线的归属
机器人场地的边线共有9条白线,我们将其编号为1~9.为了便于定位,我们利用球门目标定位的结果,将两个球门中心点连接起来,定义为0号线.如图5所示,图像上物体之间的距离通过乘以一个固定系数可以转换为实际的世界坐标系物体之间的距离.利用已知的场地环境信息,如球门到白线的距离,不同白线之间平行与垂直关系,白线与球门之间的方位等等,可以判断每条白线的归属.
(1)将检测出来的直线分为互相垂直的两组;
(2)根据所检测到的直线与0号线的关系、球门中心点到检测直线的距离、球门中心点与检测直线之间的方位等来判断该直线是场地的1~9号线中的哪一条.
2.3 利用得到的白线进行机器人的自定位
完成判别检测到直线的归属后,可以获取足球机器人到相应白线的距离和垂线方位角,利用这些信息可以进行机器人的自定位.
在实际的应用中我们会碰到如有多组互相垂直的白线、多条平行的白线和一个球门中心点等情形,此时可以得到多组位置信息,我们需要根据白线和机器人距离远近程度对得到的多组位置信息进行加权平均,最终得到机器人的位置信息,使该算法更具有鲁棒性.
表2为基于场线信息的全场定位方法在光照条件为16盏60 W日光灯,无阳光直射的10.8×7.2 m(实际场地的0.6倍缩放)的实验室场地中的实际测试结果.场上除去绿色场地、白色长线、红色球之外无其他干扰.该条件下机器人足球比赛场地上的白线是非常明显的标志,采用全景视觉的足球机器人在球场的任何位置都能看到场地上的白线.如果能够准确检测出白线,完成对整个球场地图的创建,即可实现对场上目标的绝对定位.
结合表2的数据可以看出,基于场线信息的定位方法与基于一个路标和一个角柱的全场定位方法相比,从定位精度和稳定性上来看都有明显提高.由于该种方法需要笔记本电脑对获取的连续帧做更多的图像处理分析,主要表现为大量的矩阵信息的计算,选用高性能的计算机可以在单位时间内抓取并处理更多的视频帧,得到的信息也就更能反映当时的情景,也即提高了系统的实时性.

表2 基于场线信息的全场定位方法实验结果(单位:cm)
3 结语
本文综述了RobCup足球比赛中常见的几种基于视觉的几何定位法、基于两个特征点的定位方法和基于场线信息的定位方法.基于两个特征点的算法实现简单,所需计算量小,但抗干扰能力弱,定位存在盲区且定位不够稳定;基于场线信息的定位方法算法比前者复杂,图像处理的计算量也比前者大得多,但在稳定性与精度方面与前者相比得到了很大的提升.
[1]何泽宇,付庄,曹其新,等.具有输入饱和特性的中型足球机器人运动控制研究[J].计算机工程与应用,2003,18:105-107.
[2]卢惠民.机器人全向视觉系统全场定位方法研究[D].长沙:国防科技大学,2005.
[3]刘寅东,张一龙,姜亚萍.轮式移动机器人轨迹跟踪控制的参数化方法[J].东北电力大学学报,2009,29(2):73-78.
[4]厉茂海,洪炳熔.移动机器人的概率定位方法研究进展[J].机器人,2005,27(4):380-384.
[5]李春梅,周骥平,颜景平.人工神经网络在机器人视觉中的应用[J].制造业自动化,2000,2(9):533-536.
[6]杨树谦,宋桌.红外成像制导在飞航导弹上的应用[C].中国宇航学会.2003年全国光电技术学术交流会暨第十六届全国红外科学技术交流会论文集(上).长沙:中国宇航学会,2003:205-208.
[7]徐则中,庄燕宾.移动机器人定位方法对比研究[J].系统仿真学报,2009(7).
[8]张弦,苏志远.自主移动机器人定位技术研究综述[J].机电产品开发与创新,2010(2).
[9]谢凤英,赵丹培,姜志国.Visual C++数字图像处理[M].北京:电子工业出版社,2008.
[10]章毓晋.图像处理和分析[M].北京:清华大学出版社,1998:149-181.
[11]卢惠明,郑志强.一种新的用于检测直线的快速Hough变换[J].计算机应用,2005(10).
A Research into Omni-vision Based Location for Middle-sized Soccer Robot
GENG Xiao-fei,MAO Li-min,ZHUANG Meng-qiu,XIA De-wei
(School of Electrical and Automation Engineering,Changshu Institute of Technology,Changshu 215500,China)
Accurate omni positioning is the premise of the medium-sized group of robots working properly.Omni positioning based on two feature points is neither precise enough nor stable enough and there is a dead zone, which proposes an omni positioning method based on the information of the field lines.The Hough is transformed to detect field lines,and the world coordinate system of the message definition of the field lines is used to meet the real-time requirements of the case so that accurate and stable positioning can be achieved.
omni-vision;field lines;omni positioning
TP368.1
B
1008-2794(2012)10-0100-04
2012-08-20
耿小飞(1989—),男,江苏张家港人,常熟理工学院电气与自动化工程学院自动化专业2008级学生.
毛丽民(1981—),男,江苏常熟人,讲师,硕士,研究方向:机器人与目标跟踪,E-mail:maolimin_1981@163.com.