舰船辐射噪声模拟器设计*
2012-03-27曹占启陈宝柱
曹占启 陈宝柱
(91388部队 湛江 524022)
1 引言
舰船的辐射噪声是由舰船上机械运转和舰船运行产生并辐射到水中的噪声,它是舰船最重要的声学特征。舰船的辐射噪声是被动式声纳设备的信息来源,可用于对舰船目标进行探测、定向、定位、跟踪和识别等。在水声装备的研制、仿真、试验中[1],往往需要产生舰船辐射噪声信号用于装备设计验证和性能检验,相对于实际进行海上航行试验,通过模拟器产生噪声信号方式既可以保证安全,又能节约大量的资源。本文在分析舰船辐射噪声频谱特性的基础上,综合使用环境、技术特点、价格等因素,从工程应用的角度提出了一种以FPGA和单片机为控制核心的模拟器软硬件设计方案。
2 舰船辐射噪声模型
2.1 舰船辐射噪声的来源及特性

图1 典型舰船辐射噪声频谱曲线
舰船辐射噪声信号的频谱是由连续谱和离散谱叠加而成的混合谱[2],如图1所示,通常主要由机械噪声、螺旋桨噪声和水动力噪声三部分叠加而成。机械噪声指航行或作业舰船上的各种机械振动通过船体向水中辐射而形成的噪声,包括推进系统噪声和辅机噪声,是强线谱和弱连续谱的迭加;螺旋桨噪声是由螺旋桨转动所产生的噪声,包括螺旋桨空化噪声和螺旋桨叶片振动噪声;水动力噪声由不规则的、起伏的海流流过运动船只表面而形成,它是水流动力作用于舰船的结果。
舰船辐射噪声功率谱中的连续谱反应噪声信号中随机信号的能量分布。大量的测试和分析表明,舰船噪声的连续谱存在一峰值,其频率的上限因舰船的类型而异,但都在200Hz~400Hz[2],当频率低于谱峰频率的上限时,频率随着频率的增高较平直,它占有辐射噪声的绝大部分能量。功率谱中的线谱与舰船的辅机、推进系统及螺旋桨有关,反应噪声信号的周期性噪声部分的能量分布,它们多分布在低频,而且不同舰船的噪声频谱的频率和幅值并不相同,这些线谱成为识别舰船的主要特征。
2.2 舰船辐射噪声线谱模拟
由螺旋桨引起的轴频,叶片频及其谐波的线谱频率通常在100Hz以下,与目标的航速有关;各类恒速辅机振动及结构共振引起的线谱谐波分量在幅度、频率上是相对稳定的高频线谱,一般在1000Hz以下的频域[3]。由于推进系统、螺旋桨及辅机引起的线谱噪声具有周期性的特点,所以可以用周期信号做线谱模型。线谱分量可通过产生一系列正弦信号来模拟[4]:

其中,ni为第i阶谐波组包含的谐波分量,每一组谐波有独立的随机漂移相位φi(t)、fi和ain是能够根据具体舰船进行设置的参数。
2.3 舰船辐射噪声连续谱模拟
舰船辐射噪声是非平稳随机过程,可以用局部平稳过程来拟合[5]。将高斯白噪声信号通过满足噪声频谱特性要求的特定频率响应的FIR滤波器,即得到连续谱分量的模拟。常用的FIR滤波器的设计方法主要有:窗函数法、频率抽样法、最佳一致逼近法和最小二乘法等[6],本文采用基于最小二乘方法设计自适应FIR数字滤波器。图2显示的是宽带连续噪声功率谱,低频部分以3dB/oct上升,高频部分以6dB/oct下降[7]。
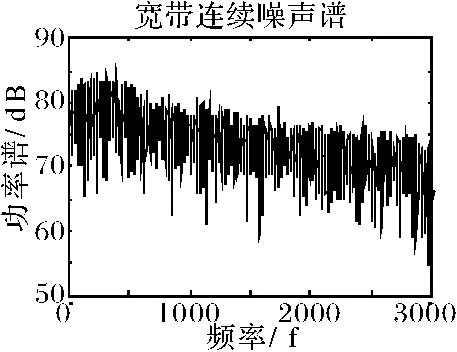
图2 宽带连续噪声功率谱
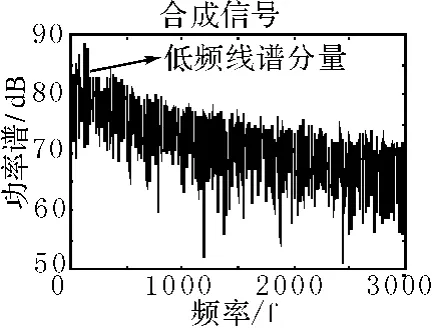
图3 舰船辐射噪声功率谱
2.4 舰船辐射噪声合成
图3是舰船辐射噪声功率谱图。其中,连续谱由白噪声通过特定滤波器获得,频率范围为0~3000Hz;线谱根据实际船的速度变化按照公式(1)获得,线谱频率取f=nms,n为谐波次数,m为叶片数,s为转速,实际应用中线谱通常取3~5个[2],图3显示低频部分有5个线谱分量。
3 辐射噪声模拟器工作原理
舰船辐射噪声模拟的设计思路是在满足指标要求的情况下,降低研制成本,提高设备可靠性。本文从两个方面进行考虑:一是尽量采用成熟技术;二是软硬件模块化设计。舰船辐射噪声模拟器组成框图如图4所示,主要有便携式计算机、模拟器主机、承重电缆和宽带换能器四部分组成。便携式计算机负责模拟器主机参数设置、产生各种噪声信号、实录噪声数据分析和噪声数据传输;控制模块以单片机为核心,负责接收便携式计算机传来的噪声数据,控制模拟主机工作;存储模块储存噪声数据;数模转换模块负责将数字信号转换为模拟噪声信号,匹配模块负责输入输出阻抗匹配和信号隔离。舰船辐射噪声模拟器可以通过两种方式模拟产生噪声:一是根据数据库里已有的噪声,调制声源级并附加多普勒频移后发射噪声;二是根据实录噪声数据分析频谱特性,模拟产生噪声。在实际使用中,一般不连接计算机,计算机只负责将干扰器数据库中的数据发送到模拟器主机既可以模拟器主机脱离,当要进行实时可编程操作时,计算机现场编制噪声信号,现场控制模拟器主机工作。
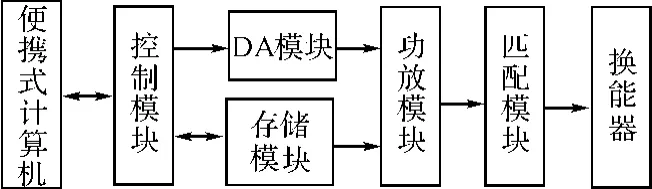
图4 舰船辐射噪声模拟器工作原理
4 噪声模拟器的整体设计
模拟器的外场使用环境比较恶劣,因此采用计算机与模拟器主机分离的设计,以提高设备的可靠性。计算机可采用笔记本或者平板电脑,这样既可以有效避免计算机电磁辐射对微弱模拟输出信号干扰,又有利于外场操作使用。
4.1 电路设计
系统整体电路设计框图如图5所示,以单片机和FPGA芯片为核心,形成系统的控制电路和信号发生电路[8]。单片机实现模拟器主机的人机交互功能,FPGA受控于单片机,并能在自身时钟控制下产生噪声信号。

图5 舰船辐射噪声模拟器主机框图
4.1.1 控制电路
模拟器主机控制电路以单片机为核心,负责计算机与信号发生电路之间数据的中转、主机参数的控制。单片机采用Atmel公司的8位低功耗COMS微控制器ATmega8。由于串口通信速度慢,使用不方便,本系统采用单片机中断和串行传输通信方式模拟USB通信,单片使用12MHz外接晶振,经过8分频可以达到1.5MB/s的传输速度,完全满足设备数据传输需要。单片机通过USB接口接收来自计算机的数据,并通过包头判断该数据包是命令包还是数据包,若是命令包则对命令包进行解析,产生响应命令,若为数据包,则通过FPGA将噪声数据存储到FLASH中。
4.1.2 信号发生电路
信号发生电路主要由FPGA、FLASH、DA和功放组成。FPGA用来提供FLASH地址寻址功能、单片机访问FLASH的时序及采样率的设定。考虑到价格因素,FPGA采用Xilinx公司XC2S100,其内部集成了地址增一发生器、双路地址选择控制接口、数据缓存器、D/A逻辑控制接口、显示控制器、时序控制器等,非常适合复杂时序逻辑的设计。FLASH采用SAMSUNG公司的NANDFLASH芯片K9F8G08,存储容量为8Gbit,它以页为单位进行读写,以块为单位擦除,具有硬件数据保护功能。DA模块和功放部分可以根据数模转换精度和噪声谱级要求进行选择。
4.1.3 电源电路
模拟器主机采用220V交流输入,以减少电源体积,采用开关电源,经过多级稳压后直流+5V输出,这样可以放在功放发射期间对主机电源的冲击,另外,通过DC-DC模块将数据、模拟部分完全隔开,减小数字电路的干扰。
4.2 软件设计
软件分为计算机部分和单片机部分。计算机部分负责人机交互界面,噪声数据库生成,录音噪声分析;单片机部分负责噪声数据的转存、命令的解析,显示屏的显示、噪声发射控制等。
4.2.1 计算机软件
计算机软件采用NI公司的虚拟仪器编程软件Lab-Window/CVI进行开发[9]。程序采用模块化设计,保证软件有较强的可移植性、可维修性和可扩充性。图6显示的计算机部分的软件流程。软件开始运行之前,是需要进行模拟器主机与计算机之间的串口连接,串口连接线采用直连线,进入主控界面之后,软件将会自动查询模拟器主机连接的串口,查询到串口连接主机后将直接进入联机状态,否则进入脱机状态。联机状态下可以进行噪声数据库管理、噪声数据下载以及主机控制操作,主机控制操作包括辐射噪声信号的发射控制、噪声种类频段的选择、噪声数据的下载、发射换能器深度以及发射噪声谱级显示;脱机状态下可以进行录取噪声谱分析、数据库管理。
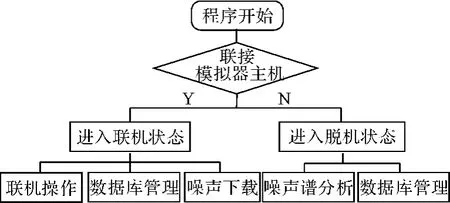
图6 计算机软件流程图
4.2.2 单片机软件
单片机软件分为通信子程序,输入子程序,显示子程序,A/D驱动子程序和FPGA驱动子程序五部分,采用汇编编程,保证了系统的实时性和稳定性[12]。
5 结语
舰船辐射噪声的仿真和模拟一直是水声领域的研究热点,在水声装备的研制及部队模拟训练方面发挥着重要的作用。本文在进行舰船辐射噪声模拟器设计时,采用成熟仿真技术,模块化的软硬件电路,克服了传统模拟技术价格高、结构复杂、可靠性差等不足,具有较强的实用性。
[1]邢国强,孙超,唐建生,等.典型舰船噪声的时域模拟[J].鱼雷技术,2005,13(4):8-11.
[2]王之程,陈宗岐,于沨,等.舰船噪声测量与分析[M].北京:国防工业出版社,2004:24-33.
[3]叶平贤,龚沈光.舰船物理场[M].北京:兵器工业出版社,1992:15-17.
[4]马徐琨.浅析水下高速航行体对转螺旋桨辐射噪声线谱建模[J].声学学报,2002,27(11):502-506.
[5]李正刚.舰艇声特征逼真模拟技术方法探讨[J].舰船科学技术,2000,22(3):40-45.
[6]张立萍.RLS自适应滤波器的Matlab设计与仿真[J].赤峰学院学报,2011,27(4):25-56.
[7]肖心敏.舰船辐射噪声主动模拟技术研究[J].舰船科学技术,2002,24(2):29-35.
[8]姚远,李辰.FPGA应用开发入门与的典型实例[M].北京:人民邮电出版社,2010:326-340.
[9]宋宇峰.Lab Windows/CVI逐步深入与开发实例[M].北京:机械工业出版社,2003:5-12.
[10]王世成,王国涛,翟国富,等.密封电子元器件微粒碰撞噪声自动检测系统的研究[J].计算机与数字工程,2010(9).
[11]罗洁,瞿安连.白噪声驱动的线性系统动态特性测量方法[J].计算机与数字工程,2012(2).
[12]胡汉才.单片机原理及其接口技术[M].北京:清华大学出版社,2010:35-46.