2D雷达与3D雷达航迹关联问题研究
2012-03-24孙宇宸
熊 伟,孙宇宸,高 峰
(1.海军航空工程学院电子信息工程系,山东 烟台 264001;2.中国航天科工集团四院,北京 100854)
雷达组网充分利用各个雷达的资源和信息融合优势,借助通信手段连接成网,由中心站统一调配,通过多个雷达之间的协调和性能互补的优势,克服了单个雷达的不确定性,提高了整个组网系统的整体作战能力。但其前提是各个雷达之间数据必须要进行有效的航迹关联。航迹关联是多目标跟踪系统中的关键环节,是进行目标航迹融合、状态估计以及态势评估的基础,航迹关联的是否精确直接影响整个系统的性能[1-5]。
航迹关联模型一般要求同时对2部或2部以上雷达进行航迹关联,并且雷达的量测维数必须一致。现实的雷达网中装备着大量的2D雷达,但又经常存在其他种类和性质的雷达,典型的情况是2D雷达与3D雷达同时对目标进行观测。如何将2D雷达和3D雷达的信息进行有效地航迹关联,以便在融合中心获得更为精确的目标状态估计,这是目前许多多雷达系统需要解决的一个重要问题[6-9]。
本文通过建立1部2D雷达与1部3D雷达对目标观测的几何模型,采用2D雷达升维来达到维数匹配的问题,从而解决2D雷达与3D雷达的航迹关联问题。
1 升维法
1.1 赋给仰角升维
1)粗关联。
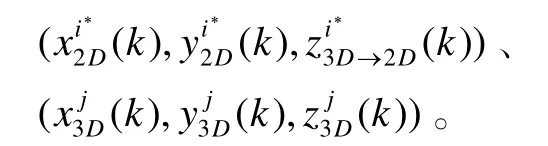
2D雷达与3D雷达的量测如图1所示,设2D雷达和3D雷达的量测向量分别为:
式中,M、N分别代表2D雷达和3D雷达探测到的目标个数,k代表时刻。
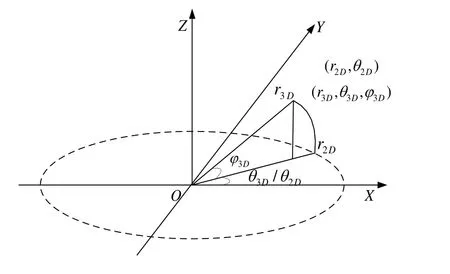
图12 坐标雷达与3坐标雷达的量测
由于2D雷达缺少俯仰信息,所以先从距离和方位信息着手,进行航迹粗关联,挑选出可能关联的粗关联对。对于3D雷达的每一个目标j,通过距离和方位信息,在2D雷达中找到与其粗关联的目标序列 [i∗],设其长度大小为s=size[i∗],粗关联的表达式如下:
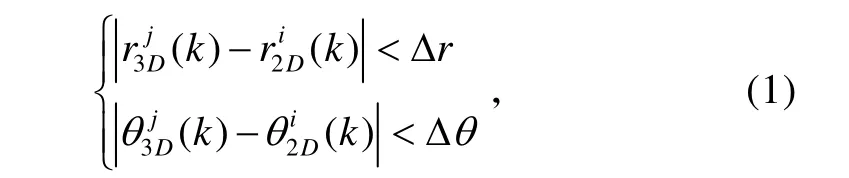
式中,Δr和θΔ为相关波门,可以通过具体的仿真来确定[10]。
通过上式在2D雷达中找到与3D雷达粗关联的目标序列 [i∗],并把与粗关联目标序列 [i∗]对应的3D雷达的俯仰信息赋给2D雷达的粗关联目标序列,这样,2D雷达的量测向量就升到三维,与3D雷达量测向量形成匹配,为下面的航迹精关联做好了准备。
2)精关联。
按上述方法进行粗关联判决,3D雷达航迹集合中的1条航迹可能与2D雷达航迹集合中的多条航迹粗关联成功。然而,每一个量测只能有1个源。也就是说,3D雷达航迹集合中的1条航迹至多只能与2D雷达航迹集合中的1条航迹关联,反之亦然。因此,在粗关联成功之后,将进行航迹精关联,以确保信息相关的准确率。
升维后,2D雷达与3D雷达的粗关联对表示为:
把2D雷达与3D雷达的粗关联对转换到直角坐标系下,得到目标的量测向量分别为:
在每一组粗关联对中找出唯一的精关联对,以达到2D雷达与3D雷达航迹关联的目的。
假设2D雷达与3D雷达对同一目标的状态估计误差是统计独立的,利用检验统计量对粗关联对进行精关联检测。

式中:X是状态估计向量;P是状态估计误差协方差。
这里我们构建关联矩阵如下:
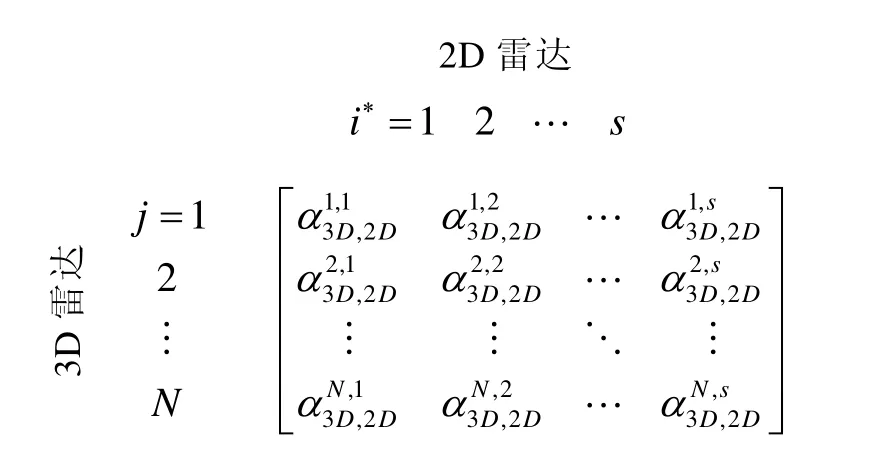
在关联矩阵中,粗关联不成功的元素项设为+∞。
在关联矩阵的每一行找出最小的元素且该元素要小于使用χ2分布获得的某一门限,作为每一个粗关联组最终的唯一精关联对,若最小的元素大于门限值,则表明该粗关联组中没有与3D雷达关联的航迹;若小于门限值的最小元素不止一个,则取使航迹间位置差矢量序列的平均范数最小的∗i为最终关联对,即选择使下式成立的∗i为j的关联对,

i的编号集合。
赋给仰角升维由于在粗关联中要用到2D雷达与3D雷达距离和方位信息的比较,所以该法只适用于2D雷达与3D雷达同地配置的情况。
1.2 估算仰角升维
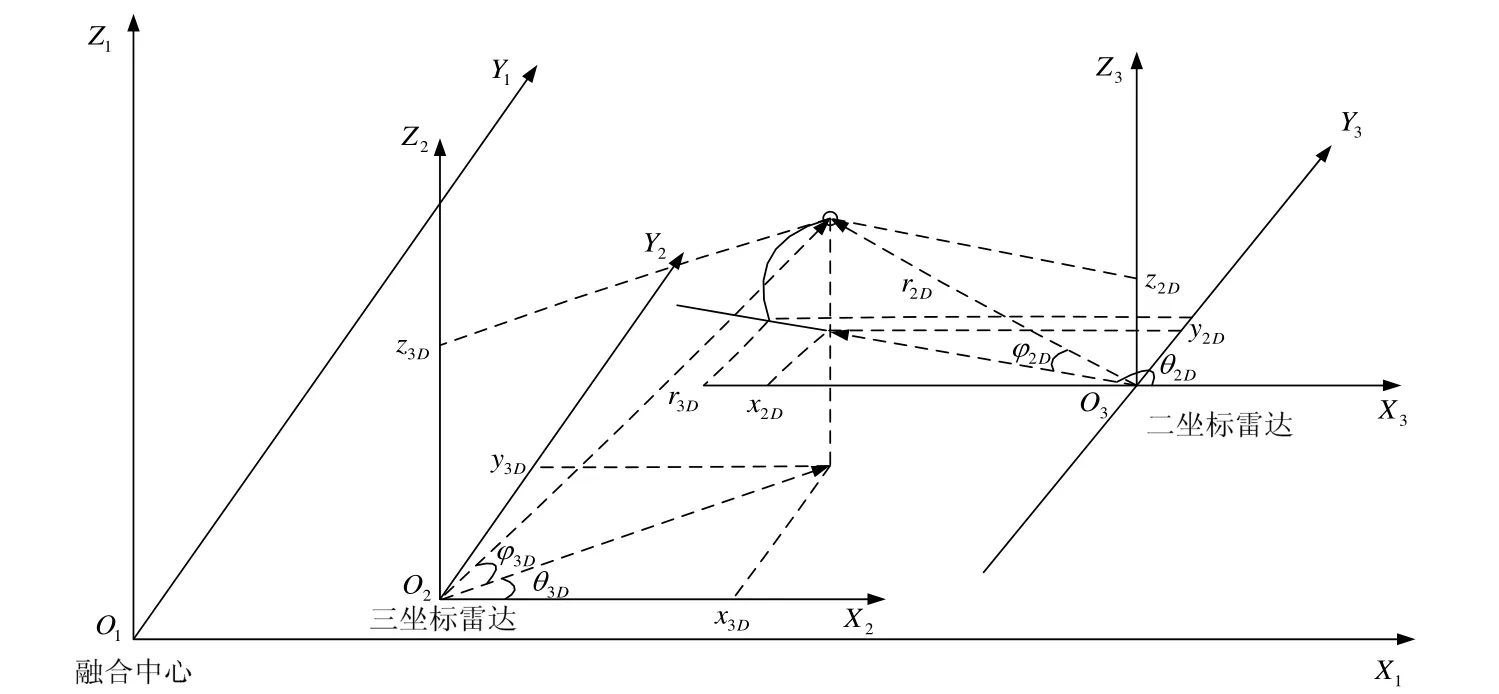
图2 估算仰角与估算高度模型图
对k时刻同一个目标来说,它在地球坐标系下的位置是固定不变的。因此,可以利用这一特性来估算出2D雷达目标测量所缺的俯仰角。
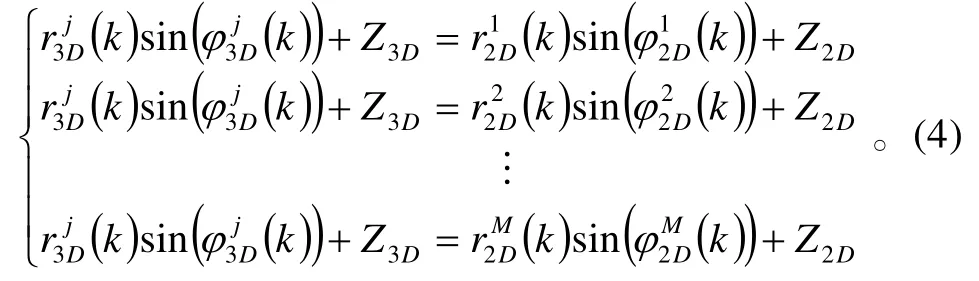
解式(4)得
在估算出k时刻3D雷达目标j相对于2D雷达各个目标的俯仰角之后,2D雷达目标的量测向量就表示为由在地球坐标系下,对k时刻同一目标的位置是固定不变的特性,把k时刻3D雷达目标j的极坐标信息转换到直角坐标系下为再转换到地球坐标系下,得到3坐标雷达目标j的量测向量为在地球坐标系下经滤波最 终 得到3D 雷 达的滤 波值然后把2D雷达目标的量测向量转换到直角坐标系下为再转换到地球坐标系下,得到2坐标雷达M个目标量测向量为在地球坐标系下经滤波最终得到2D雷达的滤波值
在得到k时刻3D雷达目标j的滤波值与2D雷达目标M个滤波值后就可以作关联了,2D雷达M个目标的滤波值符合关联规则的,则认为该2D雷达目标与3D雷达的目标j关联。关联时利用检验统计量进行关联检测,

在完成3D雷达目标j的航迹关联后,再重复利用上述方法进行3D雷达其他目标与2D雷达的航迹关联。
从上述的推导可以看出,估算仰角升维既适用于2D雷达与3D雷达同地配置的情况,也可适用于两者异地配置的情况,在不考虑地球曲率影响距离的情况下,有较强的适应性[11]。
2 仿真
2.1 仿真环境
考虑一部2D雷达与一部3D雷达同地配置的情况,坐标均为(2 000 m,3 000 m,5 000 m),三维空间中20架战机进行匀速直线运动,战机的初始x、y、z位置均在10 000~30 000 m 间产生,战机的初始速度在40~100 m/s 间均匀分布,初始方位角在0~2π间均匀分布,初始俯仰角在0~π/2 间均匀分布。假设2D雷达的测距和测方位角误差为m、3D雷达的测距、测方位角和测俯仰角误差为不考虑雷达系统误差的影响,2部雷达的采样间隔均为T=2 s,用蒙特卡洛方法进行50次仿真,每次仿真时长为N=40 s。仿真时使用搭载Pentium(R)Dual-core E2210 CPU、NVIDIA GeForce 9400 GT 显卡,装有Microsoft Windows XP Professional Service Pack 3系统的电脑。
2.2 仿真结果与分析
图3给出了仿真环境,20架战机在两部雷达的监视区域内做匀速直线运动;图4、5、6分别给出了仿真环境下,2D雷达与3D雷达两种航迹关联算法的正确、错误与漏关联概率,从图中可以看出,估算仰角升维的正确关联概率要高于赋给仰角升维,达到0.988 8左右。此外它的漏关联概率均为0,但是赋给仰角算法的正确关联概率也非常高,相比较估算仰角升维,只下降了1.557 4%。
图3 仿真环境
图4 正确关联概率
图5 错误关联概率
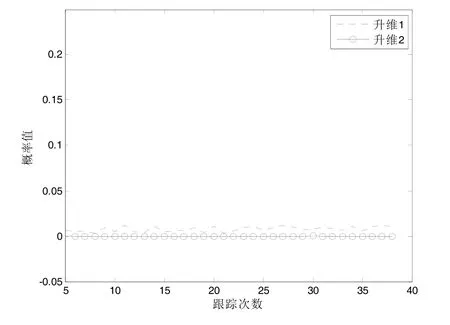
图6 漏关联概率
图7给出了目标批数为20时两种算法耗时比较图,图8给出了算法耗时随目标批数变化图。从图中可以看出估算仰角升维的耗时要大于赋给仰角升维,实时性略不如赋给仰角升维。
图4~8中,升维1代表赋给仰角升维,升维2代表估算仰角升维。
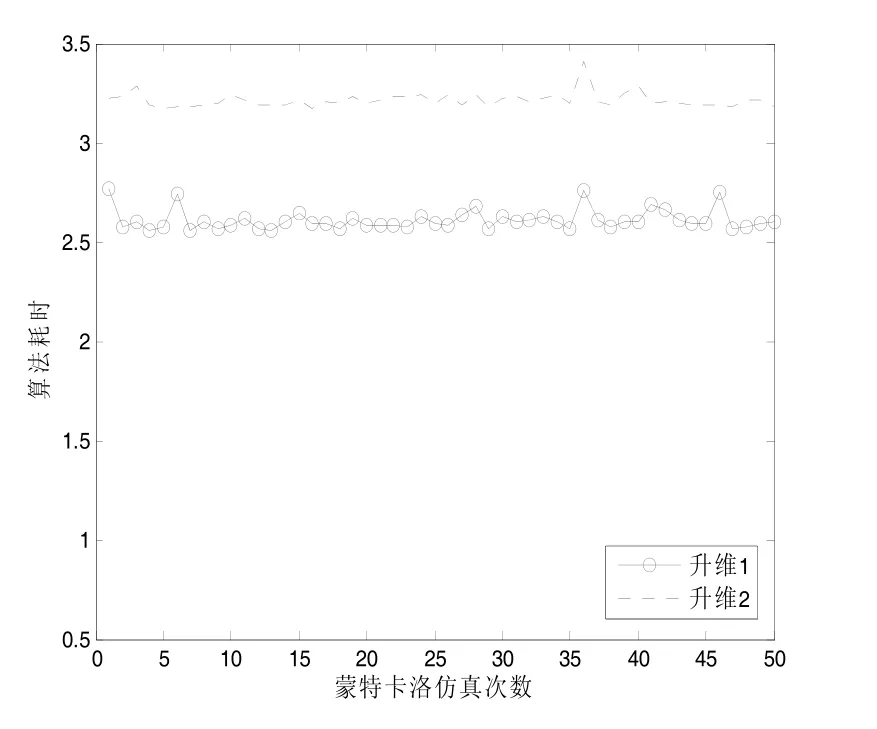
图7 算法耗时比较图

图8 算法耗时随目标批数变化图
表1给出了两种航迹关联算法随目标个数增加的关联概率,从表中可以看出两种关联算法随目标个数的增加下降都很小,相邻目标批数级之间,降幅最大的只有1.32%,两种算法均能维持较好的关联性能,即使是在目标非常密集(120批)的情况下,它们的正确关联概率最低的也能达到92%以上,具有较强的鲁棒性。
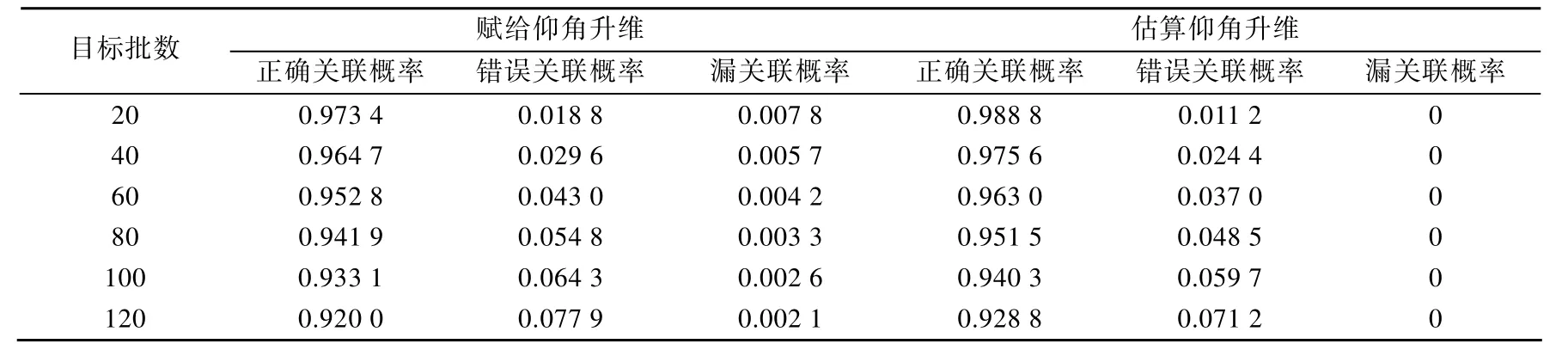
表1 降维法与升维法的航迹关联概率
4 总结
本文针对在工程应用中2D雷达没有俯仰观测,无法直接进行2D雷达和3D雷达航迹关联的问题,通过利用2D雷达升维,以达到维数匹配的目的,从而实现2D雷达和3D雷达的航迹关联。仿真结果表明,本文提出的算法均具有较好的关联效果,且有较强的鲁棒性。但是,如何把升维带来的误差引入到2D雷达和3D雷达的航迹关联中,以进一步提高航迹关联的准确性,是进一步要研究的问题。
[1]BAR-SHALOM Y,WILLIAM D B.Multitarget-Multisensor Tracking,Applications and Advances[M].New York:Artech House,2001:143-147
[2]BAR-SHALOM Y.A Tutorial on Multitarget-Multisensor Tracking and Fusion[C]//IEEE National Radar Conference.New York,1997.
[3]何友.分布式多传感信息融合算法研究[D].北京:清华大学,2006:83-87.
[4]何友,王国宏,陆大惍,等.多传感器信息融合及应用[M].2 版.北京:电子工业出版社,2000:128-183.
[5]王本才,何友,王国宏,等.双战无源均值定位算法精度分析[J].四川兵工学报,2010,31(4):78-81.
[6]徐毓,李锋.不同维状态的多传感器航迹融合[J].传感技术报,2004,17(2):117-121.
[7]何友,熊伟.带反馈分布式不同维传感器状态估计技术[J].宇航学报,2003,24(6):574-578.
[8]张殿程,江晶,陆泳舟.两坐标与三坐标雷达配准方法及其应用分析[J].空军雷达学院学报,2009,23(6):391-398.
[9]高蕊,秦超英,张希彬.不同维状态的多传感器MAP 航迹融合方法[J].昆明理工大学学报,2006,31(3):117-120.
[10]文云峰,石章松,王芳.基于多假设的航迹关联方法研究[J].舰船科学技术,2011,49(2)
[11]朱红绯.地球曲率对双基地雷达定位精度影响的计算机仿真[C]//中国自动化学会第十六届青年学术年会.北京:解放军出版社,2001:641-644.
