感应式火炬接力机器人设计与制作
2012-03-23三峡电力职业学院刘远明
三峡电力职业学院 刘远明 高 晓 胡 瑞 李 莉
感应式机器人是采用感应循迹的方法制作的一种循迹机器人,机器人的轨道被隐藏起来,循迹方式与传统的光电循迹机器人完全不同,由于这种循迹方式不受光线的干扰,因而大大扩展了这种循迹机器人活动空间,特别方便在室外进行这样的竞赛活动。竞赛时,三个机器人组成一个竞赛队,分别放置在赛道的不同位置,在裁判一声哨响之后,第一个机器人被哨声启动,点亮火炬,寻着赛道前进,在与赛道第二个机器人相会时,第一个机器人火炬熄灭,停止前进,第二个机器人点亮火炬继续前进,同样的方式,第三个机器人接过火炬后,一直前进至终点指定位置,机器人停止运行,火炬熄灭。本竞赛以达到终点的时间评定成绩,时间越短,成绩越好。与传统光电循迹机器人竞赛不一样,在竞赛的赛道上,没有明显的轨道线,机器人竞赛的赛场就是一副写真的图画,机器人循迹的轨道,是隐藏在这幅图画背面的不干胶铝箔胶带,正因为这样,这个竞赛给观众们增添了更多的神奇和乐趣。
1.感应式火炬接力机器人结构
机器人包括循迹传感器、传感器电路板、单片机控制电路板、动力电机、导向轮、碰触开关、LED火炬灯、电源等,和光电循迹机器人结构基本相同,可以直接用光电循迹机器人改装。图1是本文机器人车体结构示意图。
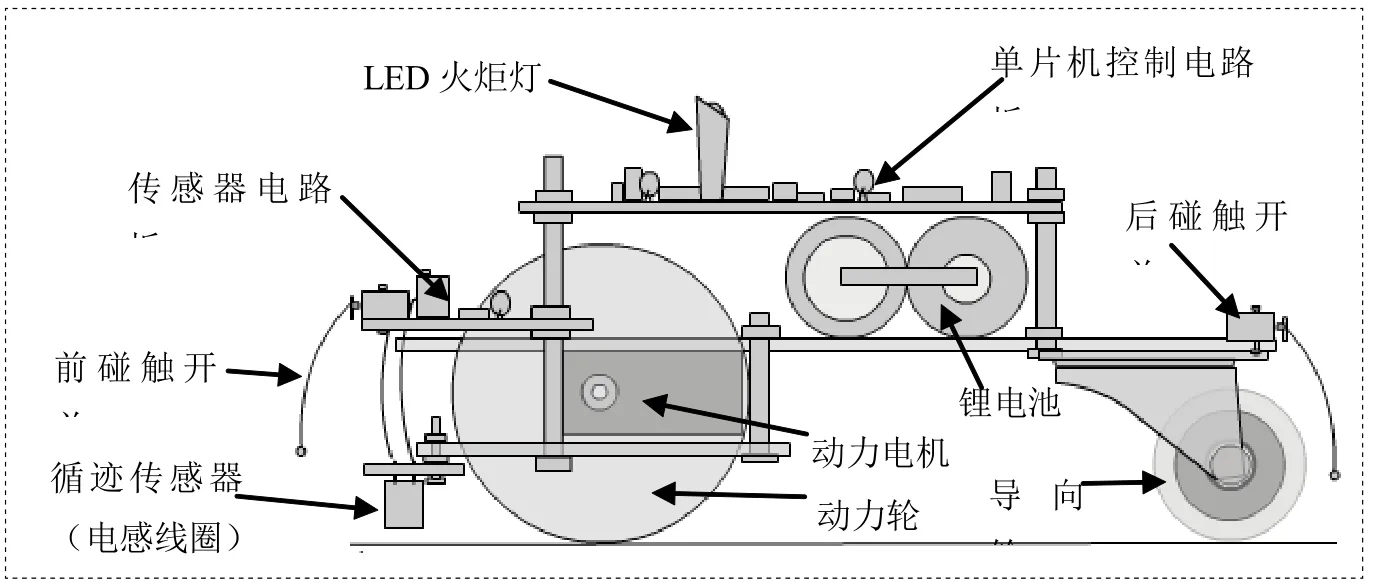
图1 感应式火炬接力机器人结构图
2.感应式循迹机器人电路设计
感应式循迹机器人电路结构与光电循迹机器人也基本相同,由循迹传感器电路,单片机控制电路,电动机驱动电路等组成,不同点在于,感应式循迹机器人采用了金属探测器作为循迹电路。
2.1 感应式循迹原理
感应式循迹传感器就是一个电感线圈。传感器电路是一个电感三点式振荡电路,这实际上是一个金属探测器电路,见图2-a,工作原理是,电感线圈L与电路中C1、C2、C3、VT1等构成一个电感三点式振荡电路,正常工作时,其产生的震荡信号经VT2放大,由D1、D2、C6等进行整流、滤波,使三极管VT3的基极获得了一定幅度的基极电压而导通,其集电极输出低电平。若把电感线圈L靠近金属物体,线圈的变化磁场会在金属物体内感应出涡流而产生铁损,线圈的Q值下降,电路振荡减弱直至停止振荡。作用在VT3基极上的电压将不复存在,三极管VT3由导通变为截止,其集电极输出高电平,我们把这个信号经处理后送给单片机I/O端口,单片机就可以通过检测该端口的信号变化,了解机器人的运行状态,给出相应的控制指令。电路中,通过调整可调电阻RP的电阻大小,可调节电路的正反馈幅度,使振荡电路刚好处于振荡的临界点上,这样可调节传感器的探测灵敏度。图2-b是作为传感器的电感线圈实物。把不干胶铝箔粘贴在赛道上作为轨道,就可以通过电感线圈与铝箔的位置了解机器人的运行状态并进行方向控制。

图2 感应式传感器电路原理图
2.2 机器人控制电路
本电路需要实现这样一些功能,1)声控启动。第一棒机器人在拍手或有哨声响后,要自动进入运行状态,点亮火炬,开始循迹前进。2)第二、第三棒机器人由碰撞来启动电路。3)第一、第二棒机器人碰撞后停止运行。4)火炬点亮和熄灭控制。5)循迹控制。6)电机的驱动控制等。控制电路采用AT89S51单片机,根据上述这些功能,要为单片机的控制设置合理的I/O口。电路见图2,P1.0口为声控电路连接口,P3.2、P3.3为火炬交接时,碰撞开关连接口,在电路板上焊装两个按钮开关,可以对碰撞效果进行检验、调试。P0.0为火炬连接口,该口连接一只LED模拟火炬。P3.4-P3.7为传感器电路的连接口,这里安排了4个端口,连接4个感应式传感器电路。单片机的P2.0-P2.3连接电动机驱动电路,驱动电路采用L293D专用集成块,可使电路设计制作变得简单一些,图4是一个声控模块电路原理图。
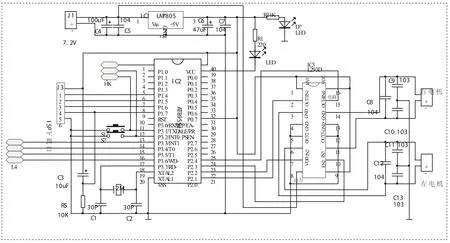
图3 单片机控制电路
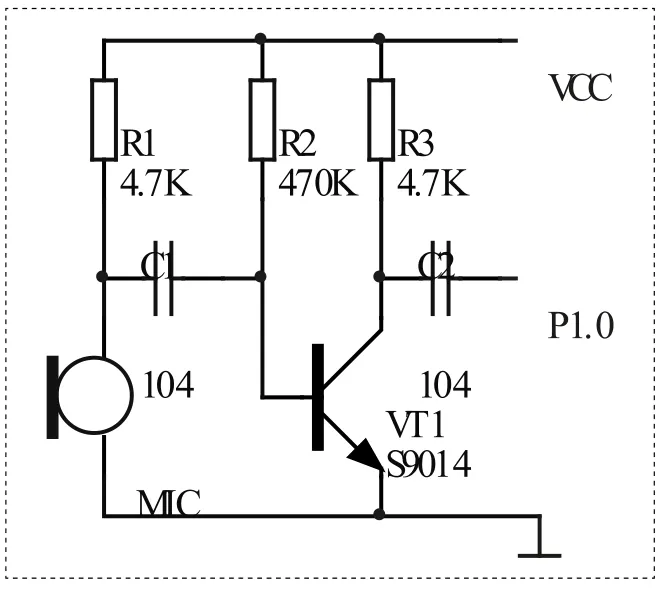
图4 声控模块电路
3.感应式机器人循迹控制设计
3.1 循迹轨道线与传感器布局
循迹用铝箔轨道线宽度为25mm,设置在赛道的中间,带不干胶,可以直接粘贴在赛场上。传感器由4个电感组成,排布在铝箔线两边,中间两个电感基本骑跨在铝箔线上,见图5-a。

图5 传感器循迹状态分析
3.2 循迹状态分析
图5示列出了机器人循迹过程中,传感器可能出现的5种循迹状态,图5-a,传感器L2、L3跨骑在铝箔线上,此时,L1out=0,L2out=1,L3out=1、L4out=0。此时,机器人工作在前进状态。图5-b,机器人出现右偏,传感器L3向右脱离铝箔线,4个传感器对应输出状态为:L1out=0,L2out=1,L3out=0、L4out=0,这时,机器人需要向左调整运动方向,其运行状态应为:左转。图5-c,L2也向右脱离铝箔线,L1靠上铝箔线,传感器状态为:L1out=1,L2out=0,L3out=0、L4out=0,此时,机器人运行状态应为:急左转。图5-d,铝箔线出现转角,传感器状态为:L1out=1,L2out=1,L3out=1、L4out=0,机器人运行状态:左转90度。有时机器人运行过快,可能冲出赛道循迹线,如图5-e,此时传感器状态为:L1out=0,L2out=0,L3out=0、L4out=0,机器人离线处理方法:后退!运行中传感器的可能出现的状态有很多,将其分类归纳,然后建立一个和运行方式对应的控制表,以此为基础,作为我们的单片机程序编写依据。
3.3 建立循迹状态与电机控制编码表
表1中,列出了部分循迹状态的编码,这个编码对应着电动机状态的控制编码,每个控制状态要维持一定的时间,把时间参数的编码和电机控制状态的编码组合后放入一个字节中,控制码放入字节的高4位,时间参数的编码放在低4位,这样可以让机器人运行程序的编写变得简捷起来。

表1 部分循迹状态对应的电机控制编码表
4.火炬接力赛程序编写
4.1 循迹控制程序编写方法
按照表1的编码方法,可以得到一个更加完整的编码表,这个表以循迹码为序,从0至F进行编排,对不可能出现的循迹状态,以“/”表示,这种状态时,让机器人的控制状态都为“前进”。这样,我们就可以获得16种循迹状态下对应的机器人运行状态的组合控制码。编写程序时,按循迹编码的大小顺序,把这个组合码放在表中,机器人运行时,让单片机不断扫描P3口获取循迹码的情况,通过查表的方式,取得到组合编码,直接把高4位控制编码送入P2端口,控制电动机运行,把延时参数送入延时子程序,就可以实现对感应式机器人的运行控制。
4.2 火炬接力赛软件流程图
除了实现感应循迹控制外,还要完成机器人火炬接力竞赛任务,前面我们在单片机控制电路设计中,已经为火炬接力安排了单片机控制端口,按照上述要求,实现火炬接力的软件流程图见图6。

图6 机器人火炬接力赛程序流程图
5.电路安装与调试
5.1 感应式传感器的安装与调试
感应式机器人电路中,采用的元件和光电循迹机器人基本相同,可以直接用光电循迹机器人改装,其循迹传感器的传感器元件L选用电感量为6.8mH的立式成品电感,根据传感器数量,每个传感器要制作一个金属探测器电路,本文采用了4个传感器,因此,需要把四个金属探测器电路集中做在一个电路板上,这样便于安装。作为传感器的电感元件,要事先固定在一个支架上,然后安装在机器人前方底盘的合适位置。要注意的是:1)中间两个传感器不能距离太近,至少要相距20mm,不然会相互干扰,不能正常工作。2)传感器底面距地面的距离3-5mm为宜,传感器灵敏度交高的,可以适当高一点,一般5mm足够了。3)安装之前,需要调整好传感器的灵敏度,方法是,把要调的传感器电路接入电感,传感器电路板接上电源,如果电路处于震荡状态,电路板上的LED会亮着,这是,用螺丝刀调电路中相应的可调电阻RP的大小,让这个LED由亮变灭,灭了以后,再轻轻的旋动螺丝刀,让这个LED正好亮起来,这样做,是为了让电路处于震荡的临界状态。这时,把螺丝刀靠近被调的这个电感元件的底部,LED应该熄灭,让螺丝刀正好熄灭的这个距离,就是传感器的灵敏度,这个距离一般在3-8mm之间。每个传感器电路,都要用这种方法进行调试,这是感应式循迹机器人正常工作的关键步骤,由于这个调试与环境因素没有关系,较之光电传感器的调试,要方便很多。
5.2 碰撞开关的安装与调试
这之前,需要先把机器人运行程序下载到单片机中,分别按下S1、S2,机器人应能启动和停止,这表明碰撞开关的控制程序没有问题。
碰撞开关选用成品轻触开关比较好,机器人前后各安装两个,两两并接起来,然后接入单片机对应接口,在调试整机的时候,按下后面碰触开关,机器人能被启动,作为火炬的LED亮起来,按下前面的碰触开关,机器人能停止工作。
5.3 声控模块的调试
第一把火炬手机器人需要声控启动,声控模块在接收到哨声或拍手声后,会输出一个脉动信号给单片机端口,以此来启动机器人运行,模块的灵敏度不要太高,不然会出现还没有准备好,机器人就被外界声音启动工作,在1米距离内拍手或哨音能启动机器人就行。
5.4 接力运行实验
最后,检验编写的程序正确与否,可以把机器人接通电源后,用声控或碰后面碰触开关的方法启动机器人,把机器人拿在手上观察,此时,机器人应工作在后退状态,把机器人放在贴好的铝箔线上,机器人前进运行,并能在转弯处自动转弯,把机器人4个传感器都压在铝箔线上时,机器人也应该停止运行。通过这样的试验,就可以组队参加机器人火炬接力的竞赛了。
6.结语
感应式机器人由于采用了新的循迹方法,传感器制作简单,调试方便,运行可靠。大大提高了循迹机器人抗干扰能力,扩展了机器人的活动空间,有利于促进学生的机器人制作竞赛等科技活动的开展,机器人火炬接力赛很好地利用了这一特点,受到学生的广泛欢迎和积极参与。
[1] 李全利.单片机原理及应用[M].高等教育出版社,2001.
[2] 懂雷刚,崔晓微,张丹.智能循迹电动小车的设计[J].大庆师范学院学报,2010,30.
[3] 黄勇.金属探测器的研究与设计[C].华南理工大学,2010.
