态势估计中的想定模型和仿真技术
2012-03-15沙岩
沙 岩
(中国电子科技集团公司第54研究所,河北 石家庄 050081)
想定模型[1]的建立是为了产生仿真的脚本,通过传感器对脚本的多次播放进行观测,对传感器在可观测区域的观测数据(比如实体的行为序列、类型、数量)进行分析和估计,分析和评估的结果与脚本进行对比,以此来验证传感器模型的有效性,接近脚本的观测数据视为理想的传感器模型的数据输出。输出的观测数据作为融合跟踪和目标识别的原始数据输入,最终为态势估计器服务。
在面对大规模条件下虚拟战场的仿真要求时,如何描述大量存在的各种各样的实体模型成为一个难点。随着仿真规模的不断扩大,仿真的精度越来越高,要求模型能够尽可能详尽地模拟真实世界的概念和对象[2]。为了让仿真更加贴近现实,如何描述模型之间存在着的各种复杂关系等问题就必须考虑进建模需求之中,要将众多的复杂模型设计融合到一起,将给设计者带来不小困难,解决问题的思路自然转到以群体组织为中心的群体组织建模技术上[3]。对群体组织进行建模的时候,模型能够较好地解决描述子群体组织或者原子实体间组织关系、交互关系和约束限制的问题,突出群体组织的特性。本文将本体引入群体组织建模技术中,并结合作战想定生成的特点和作战仿真的需求,实现一个基于本体的群体组织想定模型[4]。
vsTasker4.0是一款仿真想定制作工具软件。它能够提供完全开放性的想定规划及计算机兵力生成工具,用于仿真陆、海、空和空间实时虚拟战场环境,用于开发、生成、执行战场想定,规划战场环境,可为态势显示平台提供必要的仿真手段。
可以通过vsTasker提供的图形界面来编制想定,对应的态势显示窗口可以全面地观察虚拟战场的变化。想定中的实体模型可以扩展,允许用户将自己的模块和应用程序集成到vsTasker。
针对想定中已经添加过高斯白噪声的传感器观测数据的不确定性,可以对传感器观测数据进行分析。
1 仿真数据与态势估计的联系
按照想定模型设定、脚本的产生和播放、数据的观测和分析、融合跟踪和目标识别、态势估计的流程顺序即可将仿真数据最终服务于态势估计器[5]。
(1)想定模型的主要工作:根据设定的双方作战环境配置,生成具有时空约束关系的战场群体剧情。设定的敌我双方想定包括:双方侦察传感器地理坐标、工作参数、工作模式、观测范围、仿真时间等;订制双方主动探测雷达、雷达侦察设备、通信侦察设备等侦测系统工作状态(如地理位置、工作参数、警戒范围等);双方目标(海、空)类型、机群(海面舰队、空中编队)组成、任务、机动目标的规划航迹以及实体之间的时空关系等。
(2)脚本的产生和播放部分:主要是设定想定中实体交互过程中的条件性和随机性,对设定好的想定模型进行多次仿真。通过对脚本的播放,传感器获得具有随机性的观测数据。
(3)数据的观测和分析部分:主要是根据设定的想定模型,通过地面上的传感器对观测区域内的目标产生观测数据,包括目标位置、目标类型和目标数量等,同时对实体交互过程的条件性和随机性进行观测,即观测同一模型的不同变体。用对观测数据的分析和估计的结果与脚本对比的匹配程度来验证通过传感器获得的观测数据是否可以作为最终进行态势估计的有效无偏输入。并将这些情报信息提供给融合跟踪部分。
(4)融合跟踪部分:在进行必要的坐标转换后进行机动目标跟踪、多传感器航迹级融合跟踪,以提高目标的跟踪精度和跟踪可靠性。
(5)态势估计部分:在航迹形成和目标识别的基础上,对目标进行行为预测与判断,并给出各个目标的威胁判断等级。
由此可见想定建模和仿真研究是为态势估计器服务的一种有效的研究方法。
2 基于本体的群体组织想定模型
群体本体描述了想定中的概念以及概念与概念之间的关系,所以首先要尽可能列举出想定中群体所涉及的所有概念,并且应该对这些概念有明确的理解或详细的解释,这样才有利于更好地理解群体本体建立的目标[6]。想定中群体组织相关的概念数量众多,如果不加区别地逐一进行分析和描述会显得混乱,给下一步概念之间关系的定义上带来困难和混淆,所以首先对概念进行分类,再逐类理清概念的含义。定义的群体本体中的概念分为三类,分别是实体类型概念、属性类型概念和交互类型概念。
(1)实体类型概念,主要表示军事仿真领域需要涉及到的各种实体、装备、专有名称等。概念的定义和区分在本知识领域的概念体系中起重要作用。概念基本上都是由名词构成,例如:舰队、驱逐舰、护卫舰、雷达、传感器、飞行编队等。
(2)属性,所有的概念都会具有若干个属性,属性本身也属于概念的范畴。属性的特点在于每一个属性肯定描绘了某个或某些概念的特征和性质。因此,当定义了一个概念的时候,就必然要定义其所具有的属性。属性也是由名词构成,例如对于飞行编队来讲,飞机的名称、编号、坐标、航速、航向等都属于属性。
(3)交互关系,某些概念之间存在交互和动作,用以改变相应概念的属性值和状态,把这些交互和动作的定义归类为交互关系。交互关系大多是由动词构成。例如:巡逻、侦查、护航等。
定义了基本概念后,对这些概念进行分层组织,用于描述概念间的隶属关系,借以体现想定中群体组织的层次结构。做法是采用自底向上的方法,由最底层、最细小的概念定义开始,将这些细化的概念组织在更加综合的概念之下,形成一个等级层次结构,最终构成群体本体。
3 仿真实例及其结果分析
3.1 仿真实例
3.1.1 剧情
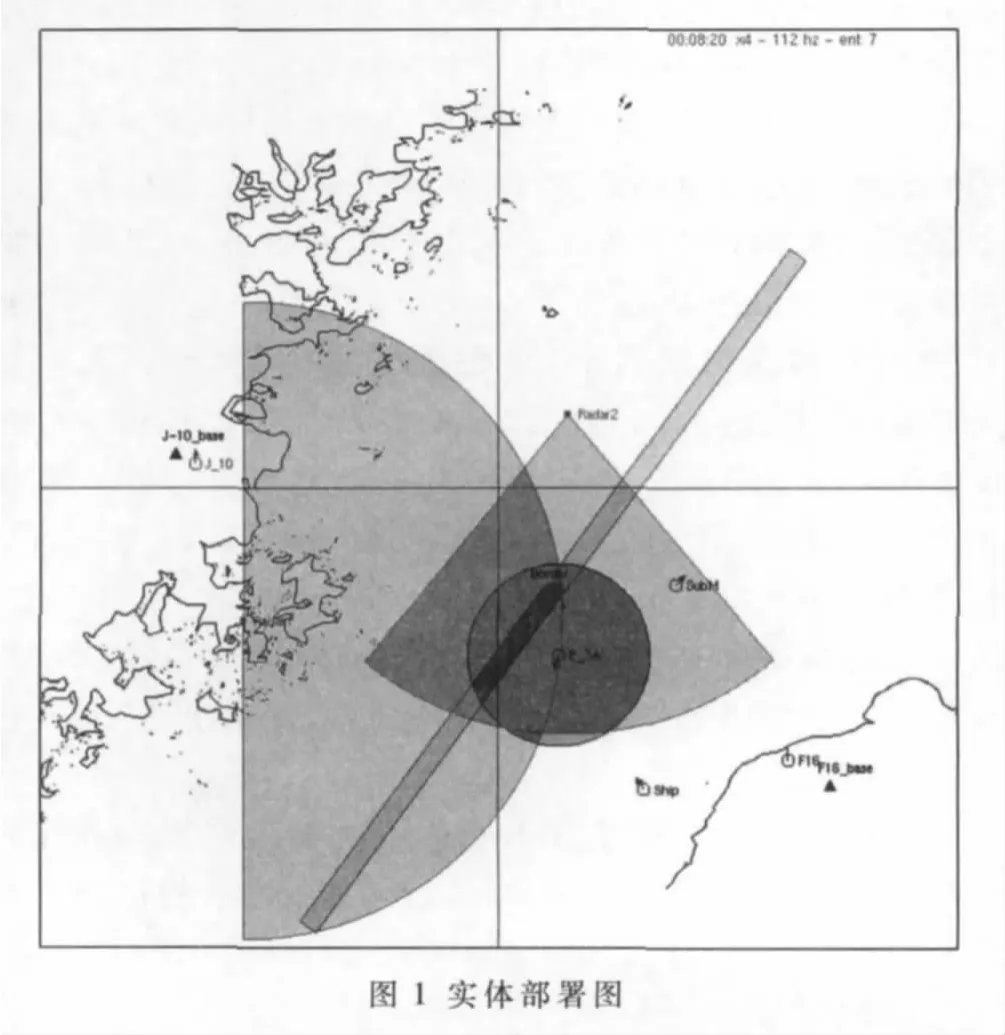
想定的实体包括A方 (图1中左侧海岸线区域)的两个雷达 radar1、radar2和 J-10,B方 (图 1中右侧海岸线区域)中的船ship、F16和预警机E3-A。环境是图1所示海域。
开始时,J-10在A方的一侧巡逻,如图1所示。J-10带有机载雷达,如果机载雷达发现B方战斗机或者预警机,J-10战斗机将脱离巡逻路线前去拦截;如果J-10接收到地面雷达指令,也可以对B方的E-3A和F-16进行攻击或者拦截。F-16在B方一侧巡逻,接受E-3A的指令。E3-A在靠近B方的区域飞行,当E3-A到达雷达扫描交接和图1中的长方形区域的交界处时,J-10接受地面雷达的命令后脱离巡逻路线前去拦截。当E3-A的雷达探测到飞行的J-10时,会向巡逻中的船ship和F16基地各发送一条信息,以此保护E3-A。同时巡逻中的F16接受消息后会朝着E3-A所在位置的方向起飞进而对J-10进行拦截以此保护E3-A。当地面雷达观测到F16的攻击任务时会向J-10发送一条消息,J-10会在机载雷达观测到E3-A时发射一枚导弹击毁E3-A,然后返回基地。同时F16会朝着J-10飞行的方向追,当靠近边界时F16随后返回基地。
A方的地面雷达1和雷达2对脚本的多次播放进行探测。随后对观测的数据(对方实体的行为变体和运动属性等)进行分析。
3.1.2 利用vsTasker生成剧本
主要包括以下几个步骤:
(1)创建数据库和场景对象
创建数据库后,就可以在数据库里创建场景对象。
(2)创建想定中包括的所有实体对象
向场景中添加2个Point Feature,包括2个飞机基地。2个飞机基地分别为A方的J-10基地和B方的F-16基地,分别命名为J10_Base和 F16_Base;另外还添加了矩形形状的Special Zone,表示分界区域Border。
设定了A方飞机的巡逻路线和B方飞机的侦察和逃跑路线。在场景中添加了3个Path Features。其中1条为A方J-10飞机的巡逻路线;1条为B方预警机E3-A沿边界的侦察路线;1条为B方F-16的飞行路线。每条Path上的关键点都设置了位置和相应的速度,速度就是飞机到达该点的速度。
想定中总共有10个实体,其中A方有4个,包括J-10基地、J-10飞机和两部地面雷达。B方有4个,包括F-16基地、F-16、一艘船,另外还包括2个导弹实体。
(3)建立相关的逻辑类和知识类,将相应的逻辑类和知识类加入到相应的实体中
添加好实体后,根据想定给每个实体添加相应的Models,利用这些Models,实体才能进行相应的活动。在创建实体时,vsTasker会根据所选实体模板(Template)自动添加一些Models。对A、B双方的飞机都选用了模板basic_wing, 则 vsTasker会自动添加 PtfStatus、WingDyn和Visual这几个子Model。利用PtfStatus可以设置实体的敌我属性、健康状况等属性。这里利用它区分A、B双方的所有实体。由于双方飞机都装备了机载雷达,且都要从基地出发和返回基地,以及沿着指定的路线飞行,所以对所有的飞机实体,都要添加 Radar、MotionGoto和 MotionSlide三个子模型。对A方的两部地面雷达,需要添加Radar模型。添加了Radar模型后,就可以对雷达的属性进行设置。
雷达属性中的Detection Curve可以设置雷达的检测概率曲线。需要先在Graphs中建立一条曲线,然后在这里选择曲线。
实体的动作流程在vsTasker中抽象为逻辑类和知识类。因此需要对各种实体动作流程建立相应的逻辑类和知识类。
定义好逻辑类后,就要给各个实体添加相应的逻辑类实例了,并且要对各个实例的属性和方法进行设置。对A方的两部地面雷达,都为它们添加了逻辑类SaveR-adarData的实例。雷达的保存数据逻辑可以用文本的方式记录观测数据。SaveRadarData类有5个成员变量,表示运动状态的噪声水平。
(4)生成仿真引擎代码、编译和运行
到目前为止,态势想定的设计工作就完成了,接下来就是要让想定按照设计运行起来。运行一次就生成海空场景中实体运动和交互的一次剧本,雷达对剧本推演的一次观测生成一系列数据。推演结束后想定回到初始状态,对实体添加不同的子模型可以生成同一类型想定的不同变体。
3.2 仿真结果分析
添加了高斯白噪声的传感器radar1和radar2对场景中的F-16进入雷达观测区域后进行观测,观测得到的是一系列间断的时间点、三维坐标、瞬时速度等数据。
雷达对进入雷达观测区域的实体的运动属性的观测是随机的,因为雷达上加了高斯随机噪声。雷达对观测区域的实体的运动属性通过一系列间断的点反映出来,这些间断的点在整数上不是连续的,有一些点因为雷达监测概率小于1和高斯随机噪声存在的原因是检测不到的。而真实情况在剧本的推演过程中雷达观测点(观测到的实体的时间点)在整数部分是连续的。通过雷达观测的数据与真实剧本推演的过程产生的数据进行对比可以检测态势估计器仿真数据的有效性。
通过雷达对F-16观测的运动属性的分析按照以下原则进行:
(1)对进入radar1和radar2观测区域雷达所观测到的点平均分为10份,对每一份雷达观测到的时间点进行分析,如果观测到的时间点占真实数据(整数上连续的时间点)的比例超过75%,则认为此份观测数据有效。
(2)对每份数据进行分析后,对一次观测的10份数据进行统计,如果超过8份的数据有效,则认为一次剧本推演过程中雷达观测的实体运动属性数据有效。
(3)对剧本推演50次,如果对于每个雷达超过48次剧本推演过程中通过雷达观测的实体运动属性的数据有效,则认为此观测数据可以作为态势估计器的无偏输入。
Radar1一共观测到112个真实时间点,而真实的数据是从251~390在整数部分上连续 (一共 140个时间点,分成 10份,每份 14个真实点),第一份真实数据从251~264,radar1 没有观测到 255、260、264 三个时间点,观测到的概率为79%,大于75%,可以认为第一份雷达观测数据有效。用同样的方法对第2到第10份数据进行分析,获得观测概率依次是 57%、86%、79%、86%、86%、93%、86%、71%、86% 。超过 75%的份数有 8份,所以认为radar1对剧本第一次推演过程中的F-16的运动属性的观测有效。通过同样的方法对radar1观测场景的剧本推演50次,符合条件(1)和(2)的有 49次,所以认为通过radar1观测场景的剧本推演过程中的F-16的运动属性观测有效,可以作为最终实现态势估计器训练和测试的仿真数据。
对于radar2对F16运动属性的观测数据,真实的数据是从201~490在整数上连续的时间点,一共 290个时间点,均分为10份,每份29个时间点。第一个时间点从201~229,radar2观测到 23个时间点,观测到的概率为79%。用同样的方法对第2到第10份数据进行分析,获得观测的概率依次是 86%、79%、89%、96%、93%、93%、86%、79%、86%,符合条件(2),所以认为 radar2 对剧本第一次推演过程中的F-16的运动属性的观测有效。通过同样的方法通过radar1观测场景的剧本推演50次,符合条件(1)和(2)的有 48次,所以认为通过radar2观测场景的剧本推演过程中的F-16的运动属性观测有效,可以作为最终实现态势估计器训练和测试的仿真数据。
利用同样的方法可以对场景中预警机E3-A、船ship的运动属性进行观测,从而构成对整个B方实体的运动属性的观测。
以个体实体为中心的行为建模与表现方法已难以满足现代军事复杂多变的应用需求,对群体组织行为建模和仿真技术的研究变得尤为重要,本文正是基于群体的建模方法研究。通过仿真获得实体数据的代价与真实战场场景相比要小得多,获得实体数据的方式也更容易,所以有一定的应用价值。
[1]王宝树,申屠晓锋.态势估计模型的研究与实现[J].计算机工程,2004,30(6):125-127.
[2]张国春.面向体系对抗仿真的建模方法研究[D].北京:国防大学,2004.
[3]张会.虚拟群体组织协同行为建模方法研究[D].长沙:国防科技大学,2006.
[4]张磊,谢彦宏.基于UML的海军作战仿真想定设计方法研究[J].计算机仿真,2009,26(5):14-16.
[5]PEREZ A G,BENJAMINS V R.Overview of knowledge sharing and reuse components;Ontologies and Problem Solving Methods[C].Proceedings of the IJCAI-99 workshop on onto logies and problem-solving method.2009.
[6]STUDER R,BENJAMINS V R,FENSEL D.Knowledge engineering,Principles and Methods[J].Data and Knowledge Engineering,1998,25(1-2):161-197.
