网络柔性重构的智能机理浅析*
2012-03-12兰巨龙程东年张风雨
兰巨龙,程东年,王 雨,张风雨
(国家数字交换系统工程技术研究中心 郑州 450002)
1 引言
网络重构[1]是一项全新的全面提升网络业务支持水平的结构性方法。从具体的结构形态上看,可重构网络分为针对功能的重构和针对性能的重构、静态重构和动态重构、节点重构和网络重构等。
网络对其结构实施重构的具体目标有两种类型:实现异型网络能力的融合和实现通用网络能力的增强。异型网络能力的融合是指网络同时具有并可以灵活地组配多种不同的基础传送能力,如电路、虚电路、分组的信息交换模式等,网络根据应用的固有特征和数据传送要求对自身资源进行分配和调节,动态调整不同基础传送能力的组合以及容量。通用网络能力的增强是指网络的基础传送能力仅有一种,如仅有分组信息交换模式,但网络通过基础传送能力到网络服务效果的“最佳对应”支持多种网络应用和业务。从总体上看,这两种能力均以其单一的网络同时支持多种网络应用和业务,但从时间和空间的重构操作粒度上看,前者侧重于大粒度的重构,而后者则更强调细粒度重构。
作为无连接、变长分组交换,IP已经被作为各类信息网络数据传递的基础模式。使用IP的信息网络具有以下4个共同的特征。
·对链路层意义的物理网络而言,是一个实现异型物理网络间互联的“超网”。
·具有语义透明性,并不针对任何特定的业务或应用,因而网络可以支持的应用类型不受限制。
·提供无连接的信道,将网络的数据传送行为与网络的内在特征相分离,这种解耦合为网络奠定了健壮性的物质基础。
·是时间和空间双重意义的统计复用信道,使得各类上层应用的数据可以在单个网络传送节点上实现时间意义的按需资源共享,而在整个网络范围内实现空间意义的按需资源共享。
网际互联、语义透明、简单健壮的优质特性,使得IP成为可重构网络的基本数据交换模式,换句话说,以实现通用网络能力的增强为目标的可重构网络将成为可重构网络的一种重要形态,因为这类可重构网络基于单一的数据交换模式构建网络结构和资源重构的控制结构,从而向特征和要求均时变的多种网络应用提供相应的时变数据信道,最终用跟随特征和要求做同步变化的服务能力,全面提升网络对业务的支持水平。然而,基于单一和通用网络能力构建网络结构和资源重构的机理、机制和控制结构却成为这类可重构网络设计的重大挑战。作为可重构网络结构调整方式的所谓“柔性”,对于服务效果与应用要求的一致匹配至关重要。支持网络结构柔性的工作机理和内在结构是什么?当前的研究多围绕结构柔性的宏观特性展开,并未清晰地回答诸如网络对其结构和资源进行重构的内在方式等问题。
2 网络结构的柔性简介
对于可重构网络而言,针对其结构和资源进行动态调整的控制结构是位于网络功能体系结构下层的基本数据交换模式和位于上层的应用时变特征及要求之间的一块“垫片”。该垫片在本质上具有功能意义而非结构意义,即其旨在实现基础数据传送能力到多样、多变应用要求的一致匹配,而具体的重构结构既可以是集中式的,也可以是完全分布式的。
柔性是重构控制结构的工作模式。作为重构控制结构的内在要素,柔性是网络针对应用要求对其内在结构、资源做出隐性和动态调整的方式,其目的是实现网络服务效果对时变应用要求的一致和稳定的符合(或匹配)。在该意义上,网络重构的柔性应当具有渐变跟随、整体要求、隐性隔离和自主驱动4个具体特征。
本文特别强调柔性的渐变跟随特征,它可以解释为网络结构对应用要求的“限距跟随”。这里的“跟随”指通过改变内在结构改变网络资源对应用要求的划分,进而使得被动时变的资源划分所表现出的网络实际服务效果尽可能地接近主动时变的应用要求;“限距”是指上述跟随所导致的服务效果与应用要求之间的差距有界,即该差距的绝对值既有下界,也有上界。下界的作用是消除时变应用要求在小尺度上的随机波动对网络结构带来的不必要影响,从而消除结构对要求的过度敏感性。显然,结构对要求的非敏感性也具有损害应用实际得到的服务效果的负面作用。这就是说,下界的设置应当同时考虑应用要求本身的随机波动特性,即下界的值应当反映应用要求在较小时间尺度上的有效和稳定的变化。设立差距上界是为了满足应用对网络服务效果降级的容限要求。用服务效果与应用要求之间差距的上界直接表达服务效果降级的最大程度,就能为网络重构操作建立直接依据,避免服务效果持续、稳定地降级,进而最大可能地保证各个应用均得到所需以及合理的网络服务效果。
显然,与时变的资源划分和应用要求相同,服务效果与应用要求之间的差距也是时变的。因此识别该时变的差距以及该差距与差距上限之间的“差距”是至关重要的。从应用对服务效果降级的容限特性这一角度看,网络应当做到在服务效果降级的最大限度之内允许应用要求最大程度地随机波动。此外,该时变的差距与差距界之间的数量关系可以成为网络重构操作有效性的重要判断依据。一方面,对差距下界的超越构成启动网络重构操作的触发条件,而对差距上界的超越则构成加强网络重构操作的触发条件;另一方面,差距稳定在上、下界之间意味着对相应的网络重构加强操作的肯定,而差距稳定在下界之下则是对相应的网络重构操作的肯定。
网络服务效果与应用要求之间差距的界因应用类型的不同而不同,对于由多种不同类型的应用汇聚而成的汇聚型应用,界的设定将是值得深入考虑和研究的问题。
针对服务效果与应用要求稳定可靠变化的网络重构才是有效的。换句话说,网络重构的有效性应当表达为网络结构对服务效果与应用要求稳定可靠变化的针对性。因此,应当也必须将服务效果与应用要求之间随机波动的稳定特征作为网络重构操作的直接依据。从该意义上讲,支持网络柔性重构核心特征的一种可行的机理是“智能低通随动”,其含义包括如下3个方面。
·可重构网络应当建立适当的低通滤波机制,用于抽取网络服务效果和应用要求的随机行为中相对稳定可靠的特征,形成直接表达该稳定可靠特征的低通信号。
·随动是指网络对应用提供的时变服务效果随时变的应用要求而动,其本质是网络对自身结构做出实时改变进而使得时变的网络服务效果受控。
·“低通”和“随动”机制应该是智能化的,即驱动网络重构的机制应当以“感知—决策—调整”的智能方式驱动具体的低通和随动操作。智能可以粗略地分为低阶和高阶两种类型,低阶智能指对静态特征进行感知、适应及局部自主优化,而高阶智能则对动态特征进行感知和适应及全局性的自主优化。
3 网络的知识驱动机理和功能结构
传统电信网和互联网分别是网络和终端具备智能的例子。近期研究表明,网络智能正被赋予新的内涵,这就是网络自主和自动适应对其多样和时变的要求。然而网络智能的必要性和可行性仍是一个颇有争议的问题,争论的一个焦点是网络为智能付出的代价是否抵得过智能所产生的收益。笔者以为,代价和收益的轻重应当同社会要求和科学技术与时俱进。一方面,社会的整体进步对当今网络的信息服务提出了前所未有的高要求;另一方面,在器件、硬件、软件、人工智能等技术已经大幅提高的今天,使网络具备智能已不存在技术障碍,并且智能所带来的收益完全有可能显著超过其代价。
事实上,使开放型网络具备智能的研究和努力一直在进行着。当前互联网的体系结构中存在着一个显著的差异,即端系统具有应用特定的强语义特征,而网络具有语义的透明性。该差异意味着网络的高等级目标——应用语义与网络内部的低等级任务特征被明显地割裂,导致当网络内部发生某种异常状态时,网络本身并不知晓它对高等级目标的意义,因而也不可能采取任何行动,网络内部的分组丢失、队列拥塞以及TCP流控就是典型的例子。1990年,网络体系结构顶级科学家、美国MIT的Clark D教授针对开放型网络首次提出了一种全新的体系结构要素——“知识面”(knowledge plane)[2],Clark教授认为传统网络中算法式的方法不能满足和适应复杂的行为要求,基于智能方法的“知识面”强调,经抽象得到高等级的网络目标,再将高等级的目标与低层的操作决策有机关联,就能够综合各种不完整甚至冲突的信息,从学习历史行为和现状中改善未来的行为,从而达到高等级的网络目标。知识面网络体系的概念结构如图1所示。

图1 知识面网络体系的概念结构
Clark教授敏锐地看到了知识与任务之间的区别和关系。他指出:任务通常能划分成互不相交的任务子集,然而知识却不能划分成多个互不相干的知识子集。一项高等级网络目标不能通过对多个独立功能 (分别对应多个任务)的组合实现,相反,应当解析知识的内涵,依据内涵界定的要素及其关系确定功能和任务,最后对各个任务进行多个层面、多种程度的有机关联。
对于具有知识面的系统而言,其核心功能结构具有闭环、学习和推理3个要素。闭环有3个不同能力等级的形式,即初级的“识别—解释”环、中级的“识别—解释—建议”环、高级的“识别—行动”环。知识面中的“学习”和“推理”有两个要义:学习环境、改进自身。例如,针对安全的学习建立一种“透视”机制,发现隐藏在透明数据平面的恶意实体,进而对行为、相关性和应用需求进行建模,推理则对现有知识进行综合并做出新的推断和是否信任的判断。
知识面定义的网络结构是功能性的,MIT的Li[3]进一步给出了具体的知识面网络结构,创立了网络知识面NetKP和高层SepcKP两种知识面功能实体。其中,NetKP采用智能代理[4]的方法搜集较低等级的网络状态,从中提炼出有价值的信息并提供给SepcKP;SepcKP则基于NetKP提供的信息进行路由优化、性能优化、网络安全等较高等级操作,而这些较高等级操作的结果是导致较低等级的新状态产生,因此两者形成有机互动的良性循环。
4 网络功能的跨层交互机理
作为对信息进行关联融合的方法,知识面构成网络实现高等级目标的重要机理,但并未涉及网络功能的具体结构形态,而当前层次式网络功能体系的现状是:各个功能单元仅仅在相邻层间的服务接入点(SAP)意义上相互关联,各个非相邻功能层之间相互隔离。对网络功能的这种人为、主观和硬性的关系划分,加上每层自身的状态信息对外不可见,均未考虑以自然的方式符合知识内涵意义上功能和任务之间的有机关联,结果一个功能单元无法得知其他单元的工作状态,更不可能利用其他单元的工作状态。显然这种功能划分结构既未针对高等级网络目标的表达和实现,也无功能单元间协同工作的结构性机制。
笔者认为,网络功能的分层不应当导致多个“孤军作战”功能和行动的简单组合,而应当是多个功能实体在多个层面上相互协同的“联合作战”。Thomas R W等人[5]于2005年首次提出认知网络(CN)的概念,2007年形成较为完整的体系[6]。CN强调通过全网认知协同实现网络端到端的目标。认知的概念源于生理学,指有意识或受意识支配的智能活动;网络认知的概念则受到认知无线电(CR)[7]的启发,CR的核心思想是在无线环境中以类智能的方式实现频谱优化。从网络体系结构角度看,CR是仅涉及物理和链路两个协议层的技术。与CR不同,CN将网络认知扩展到所有协议层,其核心是网络作为一个整体具备对业务要求、网络资源和运行状态等的完整认知能力,提出CN的动因是用观察、学习和行动的智能活动作为测量、关联和应对各类复杂变化的机制,从而满足网络端到端的目标要求,实现网络能力到应用要求优化匹配的目的。
网络认知的4个核心功能是观察、分析、决策和行动,如图2所示,支持这4个功能的核心机理是全局感知机理、学习决策机理[8~10]和反馈控制机理。

多层关联协同的核心是关联协同感知,而跨层设计[11]又成为关联协同感知的支持结构。传统的层次式网络功能模型因其模块化特征而极大地简化了功能之间的耦合关系,但这种分层也导致应用语义在垂直方向上的分割,从而难以将应用端到端的目标要求与网络内在的过程特征进行有效关联,使得网络无法与端系统联合支持应用端到端的目标要求。针对该问题,Srivastava和Motani提出了跨层设计这种新型的网络功能分层模型,其结构形态有3种基本类型:层间信令管道、层间直接通信和跨层平面,如图3所示。层间信令管道结构在协议数据单元头部建立相邻协议层之间的直接信令信道;层间直接通信结构利用ICMP以全互连方式建立任意协议层之间的直接信令信道;跨层平面结构则专门建立一个独立于已有协议栈的共享数据集,每个协议层通过API访问共享数据集以实现层间交互。跨层功能模型构成认知网络全局感知能力的结构性机理。
跨层设计的本质是对应用语义和网络状态进行关联,通过功能层之间的交互和协调机制,为支持网络端到端的目标要求设定网络功能关联协调的结构性基础。从网络体系角度看,网络功能的跨层交互消除了因垂直切割网络功能而导致的应用语义失真和阻断;相反,它建立应用语义能够任意等价传递的逻辑通道,进而从功能和结构设计的源头保证用户数据的传送要求和对网络自身实施有效的控制。
认知网络通常采用跨层设计,一个网络功能层通常不仅仅使用本层的信息,还使用其他层信息并与其他层进行动态交互,以智能的方式判断状态是否为最优,并采取行动改变网络单元协议栈的配置等。
5 分布式合作感知机理
合作感知是诸多分布化的网络功能实体协同工作,以实现网络全局目标的机制。每个承载某种功能的个体在自身所处的局部环境中收集本地状态和信息,而合作感知机制则对所有局部信息进行多等级的综合,将综合结果反馈给每个个体,指导众个体做出局部判断并实施局部操作,从而使得局部判断和操作在整体上表现为实现全局目标的全局性行为,进一步构成网络做出结构调整的重要条件。

图3 跨层设计的3种结构形态
环境或状态信息具有时间和空间的固有特征,因而合作感知具有时间和空间两种意义。
时间意义上,指在时间区段与感知实体之间建立对应关系,各个感知实体独立地获取相应时间区段的环境或状态信息Il(Δt),然后由汇集机制将各个区段的局部信息进行合并,最终综合归纳形成全局信息 Ig(ΔT)并反馈(ΔT>Δt),基本原理如图4所示,原理式为:

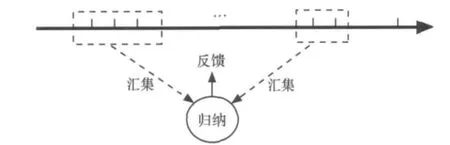
图4 时域合作感知基本原理
空间意义上,在空间域与感知实体之间建立对应关系,各个感知实体独立地获取相应空间范围的环境或状态信息Jl(a),然后由汇集机制将各个子空间的局部信息合并归纳成全局信息Jg(A)并反馈,基本原理如图5所示,原理计算式为:

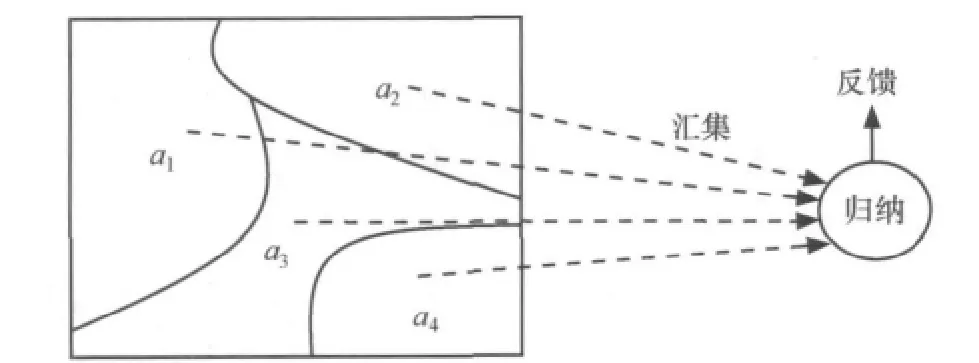
图5 空域合作感知基本原理
6 分布式智能机理
分布式协同是自然适应分布式问题的解决方法,驱动分布式协同的核心是分布式智能。网络路由问题是一个典型的分布式问题,其目标是在最大化性能、最小化代价的约束下指导流量。确定优化路由的一般性问题可表述为“在非平稳随机环境中的约束性目标优化”,除了性能最大化和代价最小化,对网络路由的其他约束有基础网络的交换和传输技术、条件等。
蚁群算法[12,13]是一种群智能算法[14,15],以完全分布的方式实现组合优化的功能结构,即一群有特定合作意向和目标的个体,通过信息素机制探索问题的状态空间,实施相互激励式的交互与合作,最终在蚁群的整体层面表达问题的最优解。
被传递数据所经路径的特征是网络实际服务效果的基础。路径至少有拓扑和性能两个基本内涵。拓扑是路径的静态特征,在拓扑意义下,最短路径指静态拓扑度量(如跳数等)取值最小的路径,当前互联网所依赖的IP网络路径主要是拓扑意义的。相对而言,性能意义下的最短路径则指某个性能度量取值最优(如时延最小、吞吐率最大等)的路径,显然,性能构成路径的动态特征。比较而言,拓扑意义路径的特征随网络拓扑的变化而变化,而拓扑变化通常是较大尺度的,性能意义路径的特征则会随数据传递实际效果的变化而变化,性能通常在较小尺度上发生变化。基于蚁群算法针对的正是性能意义的网络路径。
作为全新的激励式交互通信机制,信息素对于蚁群合作寻优起到以下5个重要作用。
(1)标记
每个蚂蚁个体通过释放信息素表达其经历,因此信息素本质上是对全局路径瞬时状态的记录、表达和通告。个体k在一个节点上释放的信息素的量Δτk与当前节点i到目的节点d的距离lid和经历的时延did成反比[16],即:

(2)累计
位置i处的信息素τijd(t)表示在t时刻从 i到达 j最终去往d的所有个体所释放的信息素累计值,即:

这样,表面上随机形成的信息素强度的分布自然地表达了网络路径长度的内在特征。
(3)引导
信息素构成个体在任何位置选择本地路径而继续前行的直接依据。
(4)放大
信息素浓度正确表达了路径的质量水平,如路径的长或短。较高浓度的信息素会在未来吸引较多个体访问(即历经),其结果又会进一步增大信息素的浓度,形成放大吸引作用的正反馈效应。
(5)辟新
信息素会自然挥发,从而形成鼓励蚁群开辟新径的有效机制:

其中,c为信息素挥发系数,典型地,c=1/(1+Δτk(s))。
信息素最终用于对路由表的修改。依据对本地路径“个别加强—普遍减弱”的原则,通过信息素突出表现被选择的下一节点。对路由修改的结果是累加被选择节点的信息素并减小未被选择节点的信息素。对于去往目的节点d的第k个蚂蚁个体而言,如果它在节点i选择i的邻居q作为下一个要到达的节点,则分别通过下述两个规则修改路由表:
十九大报告指出,“不敢腐的目标初步实现,不能腐的笼子越扎越牢,不想腐的堤坝正在构筑,反腐败斗争压倒性态势已经形成并巩固发展”[1]P8。要真正构筑起“不想腐的堤坝”,根本上还要通过加强全党理想信念教育和思想理论学习,通过思想理论学习不断强化马克思主义理论素养,坚定共产党人的理想信念,增强中国特色社会主义道路自信、理论自信、制度自信、文化自信。因此,要坚持以思想建设为引领,为全面从严治党向纵深发展提供科学理论指引和强大思想武器。

美国中佛罗里达大学的Gelenbe E教授[17]于1999年提出了一种基于蚁群分布式智能的具体网络结构——认知分组网络(cognitive packet network,CPN),它具有如下 3个显著特征。
·针对具有 QoS要求的流。
·将路由计算转交给流,由流为自己选路,其结果是网络节点不再具有“路由表”,而仅具有学习路由的强化学习算法。
·创立了3种全新的分组类型:称为智慧分组(smart packet,SP)的前向分组(沿源到目的方向运动),为一个流确定完整的路径;称为应答分组(ACK packet,AP)的反向分组(沿目的到源方向运动),负责反向带回路径信息和测量数据;称为哑分组(dumb packet,DP)的前向分组,以源路由方式承载应用数据。
每个SP均有自己特定的性能、代价、安全等目标,携带一段旨在与网络节点交互(对话)的代码,而支持网络节点与智慧分组交互的功能实体是邮箱(mailbox),邮箱内存储表示QoS状态的信息素。每到达一个节点,SP以较大概率理性地(即通过学习算法)自我做出选路决策,而以较小概率(如5%)随机选路。SP与网络节点之间的具体交互操作包括:读取邮箱和自身目标、运行自适应学习算法、计算并决定下一跳、累积存储经历的路由信息和QoS信息。每次交互完成后,SP将所测量的信息(如经历的路径和QoS状态等)存入自身的特定字段。
当SP到达目的节点后,自动“变身”为一个对应的反向AP分组,SP将自身携带的路由信息和QoS信息转移到该AP。AP反向沿SP经历路由(未必是最短路由)折回源节点。每经历一个网络节点就将其携带的QoS信息存储在该网络节点的邮箱内。到达源节点后,再将其携带的全程路由信息存储在源节点的哑分组路由表(DPRR)中,一个“源—目的地址”源组在DPRR表中可有多个表项,通常只有一个表项对应“最短路径”。
DP从DPRR中选择最晚创建的表项作为自己的 “源路由”,在从源到目的的途中仍然收集QoS信息,到达目的后变身为一个反向的哑应答分组(DACK),DP将其收集的状态信息转移到DACK中,该DACK再折回源节点,在折回途中将时间信息存储在每个网络节点的邮箱,并更新源节点的DPRR。
与协议驱动和拓扑驱动的“网络为应用选路”的传统路由相比,CPN使用的是非协议驱动、非拓扑驱动的“自我路由”。自我路由的目标是计算性能意义的动态路由,采用的机理是“探索—引领”,即引入 SP、AP和 DP,其中SP和AP是进行主动寻路的信令分组,DP则使用SP和AP计算出的“新鲜”路由信息传送应用数据,从而使得应用数据动态和最大程度地沿QoS意义的最佳路径传送。
CPN为SP设定了多种不同的学习算法计算路由。Bang-Bang[18]是其中较为简单的一种学习算法。每当SP到达一个网络节点,就运行该算法进行本地选路:从节点邮箱中读取历史信息,分别计算某个QoS指标量的均值X及其估计X*,若X* 比较Tk-1和Rk,根据比较结果同时调整与输出链路对应的RNN节点的兴奋或抑制权值w+/w-以及所有其他输出链路所对应RNN节点的兴奋或抑制权值,根据所有RNN节点调整后的兴奋或抑制权值w+/w-计算每个节点的点火率ri,对每个节点的ri进行归一化得到 r*,用归一化的点火率r*计算每个RNN节点的兴奋程度qi,最后用兴奋度qi作为选择输出链路i的概率。 各种学习算法都表现为在空间上随机分布的诸多个体通过个体智能在问题空间的一个子空间上求解。具体地说,蚁群个体的智能表现为依据局部规则进行局部计算,以与邻近个体进行交互的方式进行局部合作。令人惊奇的是,虽然每个个体都不能仅靠自己发现全局意义的最优路由,但蚁群团队却能准确地计算出该最优路由,即众多个体局部计算和局部合作反映在蚁群整体上产生全然不同的全局行为和结果——涌现[20],整体层面的涌现与微观的局部计算之间表现为难以解析表达的非线性关系,涌现精确刻画了复杂的非线性整体问题的最优解,因而研究分布式智能的目的是寻找个体间通过局部关联、合作和自组织而发生涌现的微观工作机理、运动形式和组织结构。 IP因具备网际互联、语义透明、简单健壮等优质特性而被公认为当今和可预见的未来信息网络基本的数据传送模式,然而将IP作为单一的基础传送模式建立可重构网络却成为一个挑战。本文首先说明了重构方式应当服务于效果与要求“一致匹配”这一核心目标,揭示了柔性重构为达到该目标应当具备的渐变跟随特征,接着分别从知识驱动和功能结构、网络功能的跨层交互、分布式合作感知和分布式智能4个方面,论述了支持网络结构柔性的工作机理和内在结构。受性能约束的路由既是分组交换网络保证数据传送质量的一个要素,也因其具有的小尺度和高度动态性成为一个难点,对于性能约束路由这类小尺度非线性优化问题,本文强调了采用蚁群优化算法这种能够在求解单元团队的层面上以“涌现”的形式表达最优解的全分布式机理,该机理对于求解动态、分布式和非线性问题具有很强的针对性和有效性。 网络结构的柔性可以也应该具有全新且有益的观察视角。对于重构网络而言,从柔性的渐变跟随这一核心特征出发,可以并且也有理由将承载流量的网络结构和被承载的流量视为能动的主体,即结构和流量都可以自主地进行自我调节而趋近它们各自或共同的目标。对能动主体的这种认定表达了有区别的网络要素角色的观点,而多要素角色意义的能动式自我调节则是网络结构渐变跟随性质的高级形式。 在网络多要素能动调节的意义下,具备柔性的可重构网络的逻辑结构可以分为如下3种基本形态。 第一,“上适应”形态。这是一种以网络结构为单一动力学要素的动力学系统形态,即网络结构具备调节自身能动性的能力而流量不具备。根据预定的优化目标,网络结构实时测量它对流量的实际承载效果与预定目标之间的差别,当该差别稳定呈现后,用该差别驱动自身结构的调整,以实现差别的最小化。 第二,“下适应”形态。这是一种以网络流量为单一动力学要素的动力学系统形态,即网络流量具备调节自身能动性的能力而网络结构不具备。根据预定的优化目标,网络流量实时测量它的运动轨迹或分布所对应的实际承载效果,再测量该效果与预定目标之间的差别,然后由稳定的差别驱动对流量运动轨迹或分布进行调整,以实现差别的最小化。 第三,“双适应”形态。这是一种同时以结构和流量为双重动力学要素的动力学系统形态,此时,具有共同目标的网络结构和流量均具备调节自身能动性的能力。与“下适应”和“上适应”形态不同的是,除了各自的内在动力学机制外,“双适应”形态需要一种特殊的交互机制,这种交互机制使得结构和流量中的任何一方可以向对方传递特定状态的当前值和(或)期望值,同时还可以从对方得到调节自身所需的特定状态的当前值和(或)期望值,进而通过决策决定自身后续的动力学行为。由此可以说,交互机制作用下的联动与协同构成双适应这一能动形态的本质特征。 由于具备“双向趋同”的独特性质,这种双能动体系结构的联动与协同应当比单一能动形态更有利于共同目标的实现。当然,这种理念的内涵和表现形式还有待进一步完善、细化,其有效性也需要进一步的验证。 蚁群算法也存在值得深入研究的问题,具体如下。 ·结构形式,包括蚁群规模、每个原发节点产生蚂蚁个体的概率或速度、网络状态对蚁群规模的影响等。 ·行为模式,包括估计蚁群对计算路由所需的条件、求解算法,蚁群对网络性能产生的影响以及这种影响对蚁群计算模型的反馈效应等。 ·行为模式对结构形式的作用方式,即路由计算效果和对性能的影响如何改变蚁群的规模,比如如何定位恰好找到最佳路径所对应的蚁群规模,从而使蚁群对网络带宽的耗费最小。 ·蚁群算法收敛速度的提高。收敛速度受蚁群算法中诸多要素的制约,如蚂蚁个体的生成模式、信息素的定义及其累积方式、对个体随机操作的定义、对信息素挥发的定义等。快速收敛的蚁群算法因更强的敏感性而更适于高度动态和小尺度问题的优化,更具实时性。 1 刘强,汪斌强,徐恪.基于构件的层次化可重构网络构建及重构方法.计算机学报,2010,33(9):1557~1568 2 Clark D D,Partridge C,Ramming J C,et al.A knowledge plane for the internet.Proceedings of ACM SigComm 2003,Karlruhe,Germany,August 2003 3 LiJ.Agent Organization in the Knowledge Plane.Ph D Dissertation,MIT,2008 4 Russell S,Norvig P.Artificial Intelligence:a Modern Approach,Second Edition.Prentice Hall,2002 5 Thomas R W,Dasilva L A,Mackenzie A B.Cognitive Networks.Proceedings of IEEE DySPAN 2005,2005:352~360 6 Thomas R W.Cognitive Networks.Ph D Dissertation,Virginia Polytechnic Institute and State University,June 2007 7 Mitola J.Cognitive Radio:an Integrated Agent Architecture for Software Defined Radio.Ph D Thesis,Royal Institute of Technology,2000 8 That hacharm M A L,SastryP S.Networks of Learning Automata.Kluwer,2004 9 Sutton R S.Learning to predict the methods of temporal difference.Machine Learning,1988(3):9~44 10 Kaelbling L,Littman M,Moore A.Reinforcement learning:a survey.Journal of Articial Intelligence Research,1996(4):237~285 11 Srivastava V,Motani M.Cross-layer design:a survey and the road ahead.IEEE Communication Magazine,2005,43(12):112~119 12 Colorni A,Dorigo M,Maniezzo V.Distributed optimization by ant colonies.Proceedings of ECAL'91,European Conference on Artificial Life,Elsevier Publishing,Amsterdam,1991 13 Schoonder W R,Holland O,Bruten J,et al.Ant-based load balancing in telecommunications networks.Adaptive Behavior,1996,5(2):169~207 14 Reynolds C.Flocks,birds and schools:a distributed behavioral model.Computer Graphics,1987(21):25~34 15 Toner J,Tu Y.Flocks,herds and schools:a quantitative theory of floking.Physical Review E,1998(58):4828~4858 16 Schoonder W R,Holland O,Bruten J,et al.Ant-like agents for load balancing in telecommunications networks.Proceedings of the First International Conference on Autonomous Agents,ACM Press,1997:209~216 17 Gelenbe E,Xu Z,Seref E.Cognitive packet networks.Proceedings of the 11th International Conference on Tools with Artificial Intelligence(ICTAI’99),Chicago,IL,USA,1999:47~54 18 Gelenbe E,Seref E,Xu Z.Simulation with learning agents.Proceedings of the IEEE,2001,89(2):148~157 19 Gelenbe E.Learning in the recurrent random neural network.Neural Computation,1993,5(1):154~164 20 Chu T,Wang L,Chen T,et al.Self-organized motion in a class of anisotropic swarms:convergence vs oscillation.Chaos,Solitons&Fractals,2006,30(4):875~885
7 结束语