纯电动公交工况自识别系统的开发与仿真*
2012-03-09唐邦强尹志宏张炳力李锁斌
唐邦强 尹志宏 张炳力 李锁斌
(昆明理工大学机电工程学院1) 昆明 650093) (合肥工业大学机械与汽车工程学院2) 合肥 230009)
行驶工况是纯电动汽车能量管理系统的重要输入参数之一,合理设计工况对应的控制策略可以获得良好的控制效果,降低能耗.然而实际运行工况是一个随机的、不确定的过程(尽管实际行驶工况可能包含一些理论循环)[1],这样的输入影响控制策略的效果,也会加大动力系统的匹配优化的难度,因此有必要寻找一种合理的处理方法将实际工况输入转变为一个标准工况.本文以合肥市纯电动公交工况(HF-PEB-DC)为例,利用模糊控制开发出工况自识别系统,并搭建一个SIMULINK模型进行仿真,得出整定后的工况作为纯电动公交车能量管理系统的工况输入.
1 工况自识别研究的意义
纯电动汽车能耗与行驶工况等诸多因素有着密切的关系,蓄电池的净能量消耗由式(1)表述,蓄电池输出功率由式(2)表达,蓄电池端的再生制动功率由式(3)表达[2].

式中:Pb-out为蓄电池输出功率;Pb-in为蓄电池端的再生制动功率;v为车速;M为车辆质量;fr为滚动阻力系数;i为路面坡度;ρa为空气密度;Af为迎风正面面积;CD为空气阻力系数;δ为旋转质量转换系数;ηt为传动装置功率损耗;ηm为电机驱动中的功率损耗;α为再生制动系数.公式表明Eout不仅与 M,fr,i,Af,CD,δ,ηt,ηm等车辆自身和道路参数有关,还与v,dv/dt,α等工况参数有关,在车辆自身和道路参数确定的情况下,合理的工况参数可以降低能量消耗.电动汽车能量管理系统对检测到的状态按预定的算法进行推理和计算,并向能量存储装置发出指令.将实际行驶工况分解为典型的工况模块,制定相应的控制策略,优化预定的算法,使能耗有最优解.即当车辆处于某个行驶状态时,系统能依据过去n段的状态,结合特征量的变化自动识别目前的状态符合哪个模块,控制系统按照此模块对应的控制策略发出指令,从而达到节能的目的.因此识别工况并以此为基础制定控制策略有利于降低纯电动汽车的能耗,这就是设计纯电动公交工况自识别系统的出发点.
2 合肥市纯电动公交工况循环(HF-PEB-DC)
文献[3]给出了合肥市纯电动公交工况A,B,C 3个典型模块,A模块驻车时间长,低速状态,平均车速4.67km/h,是急加速缓减速模式,适合红绿灯多及其拥堵路段;B模块驻车时间短,慢速状态,平均车速15km/h,是加减速均衡模式,适合红绿灯较多拥堵状况一般的路段;C模块驻车时间极短,中速状态,平均车速28km/h,是缓加速急减速模式,适合红绿灯少畅通路段.纯电动公交车实际行驶状态大都是A,B,C模块的组合,只不过组合状态不同而已.合肥市纯电动公交工况循环见图1.

图1 合肥市纯电动公交工况循环图
3 工况自识别系统的开发
工况自识别系统的功能是将纯电动公交车的实际行驶参数输入模糊控制器,由模糊控制器自动识别目前的行驶状态符合哪种典型模块,并将识别出的模块作为能量管理系统的输入之一,因此模糊控制器的开发是自识别系统开发的最关键环节.图2是工况自识别系统框图,这是一个双参数三输入-输出模糊控制系统.首先判断平均速度是否超过30km/h,超过使用其他方式处理,结果输入能量管理系统,否则信号进入模糊控制器,模糊控制器另两项输入为纯电动公交车驻车时间比例、最大加速度值a,输出是典型模块参数u.

图2 工况自识别系统框图
3.1 控制策略
在总结实际操作经验的基础上,结合模糊控制的特点和能量管理系统的要求,纯电动公交工况自识别系统的主要控制策略如下[4]:
1)平均车速高(v>30km/h)时,电动车按高速控制方式执行.
2)平均车速中等(20<v≤30km/h)时,若驻车时间不长,在加速、匀速或微减速状态下车辆按中速控制方式执行,强减速状态时车辆按慢速控制方式执行;若驻车时间长,在强加速、微加速、匀速状态下车辆按中速控制方式执行;减速状态下车辆按慢速控制方式执行.
3)平均车速慢(10<v≤20km/h)时:若驻车时间短,在加速状态下车辆按中速控制方式执行.匀速或微减速状态时车辆按慢速控制方式执行,强减速状态时车辆按低速控制方式执行;若驻车时间中等,在强加速状态下车辆按中速控制方式执行.微加速、匀速或微减速状态下按慢速控制方式执行,强减速状态时车辆按低速控制方式执行;若驻车时间长,在加速状态下车辆按慢速控制方式执行.匀速或减速状态下车辆按低速控制方式执行.
4)平均车速低(0<v≤10km/h)时:若驻车时间短,在加速状态下车辆按慢速控制方式执行.匀速或减速状态时车辆按低速控制方式执行;若驻车时间不短,在强加速状态下车辆按慢速控制方式执行.其余状态下按低速控制方式执行.
3.2 模糊器语言变量的赋值表
模糊器输入驻车时间比例scale的语言变量选为SCALE、平均速度va的语言变量为VA、加速度值a的语言变量为A,输出u的语言变量为U.设纯电动公交车驻车时间比例的论域为[0,100%],选定scale的论域为 X={0,0.05,0.1,0.15,0.2,0.3,0.45,0.5,0.6,1},其语言变量SCALE选取3个语言值:{PB,PM,PS},根据合肥市纯电动公交工况循环的特点,可确定隶属函数μ(x)为梯形分布函数,并据此建立语言变量SCALE的赋值见表1.
平均速度va的论域为[0,30],选定语言变量VA 的论域为{-6,-5,…,0,…,5,6},量化因子kva=6/15,语言值选取{PB,PM,PS},确定隶属函数为梯形分布函数,建立语言变量VA赋值见表2.
加速度a的论域为[-1.5,1.5],选定语言变量A的论域为{-6,-5,…,0,…,5,6},量化因子ka=4,语言值选取{PB,PM,O,NM,NB},确定PB,NB的隶属函数为梯形分布函数,PM,O,NM的隶属函数为三角分布函数,建立语言变量A赋值见表3.
输出u的论域为[0,30],选定语言变量U 的论域为{-6,-5,…,0,…,5,6},量化因子ku=6/15,语言值选取{PB,PM,PS},确定隶属函数为梯形分布函数,建立语言变量U赋值见表4.
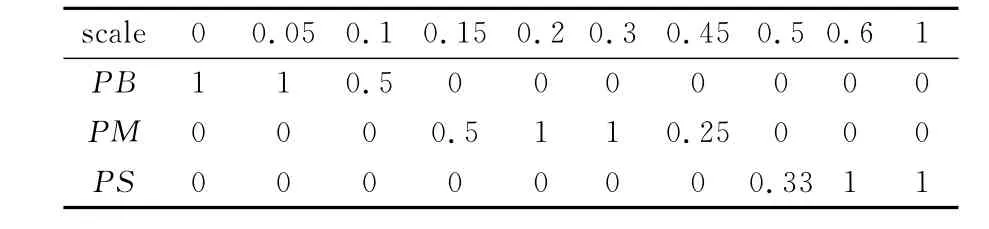
表1 语言变量SCALE赋值表

表2 语言变量VA赋值表

表3 语言变量A赋值表
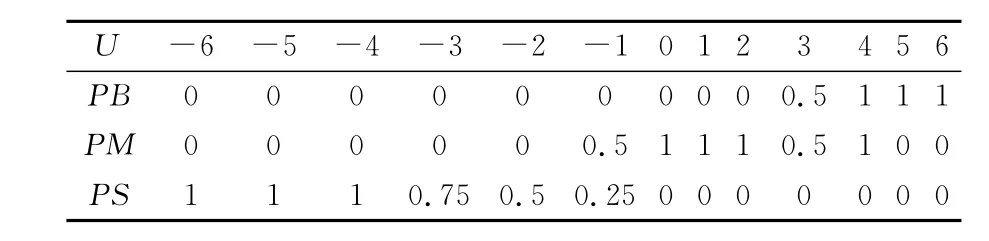
表4 语言变量U赋值表
3.3 模糊状态表
根据总结的经验共有45条控制规则,将其合并归类可得出模糊状态表,如表5所列.表中每一条规则都决定一个模糊关系,用Rn(n=1,2,…,45)表示,它们一共是45个,例如R1,R2,R25,R26分别为

通过45个模糊关系的并运算可获取表征工况自识别系统模糊控制器控制规则总的模糊关系R,即

3.4 模糊控制总算法
计算出模糊关系R以后,利用推理合成规则计算

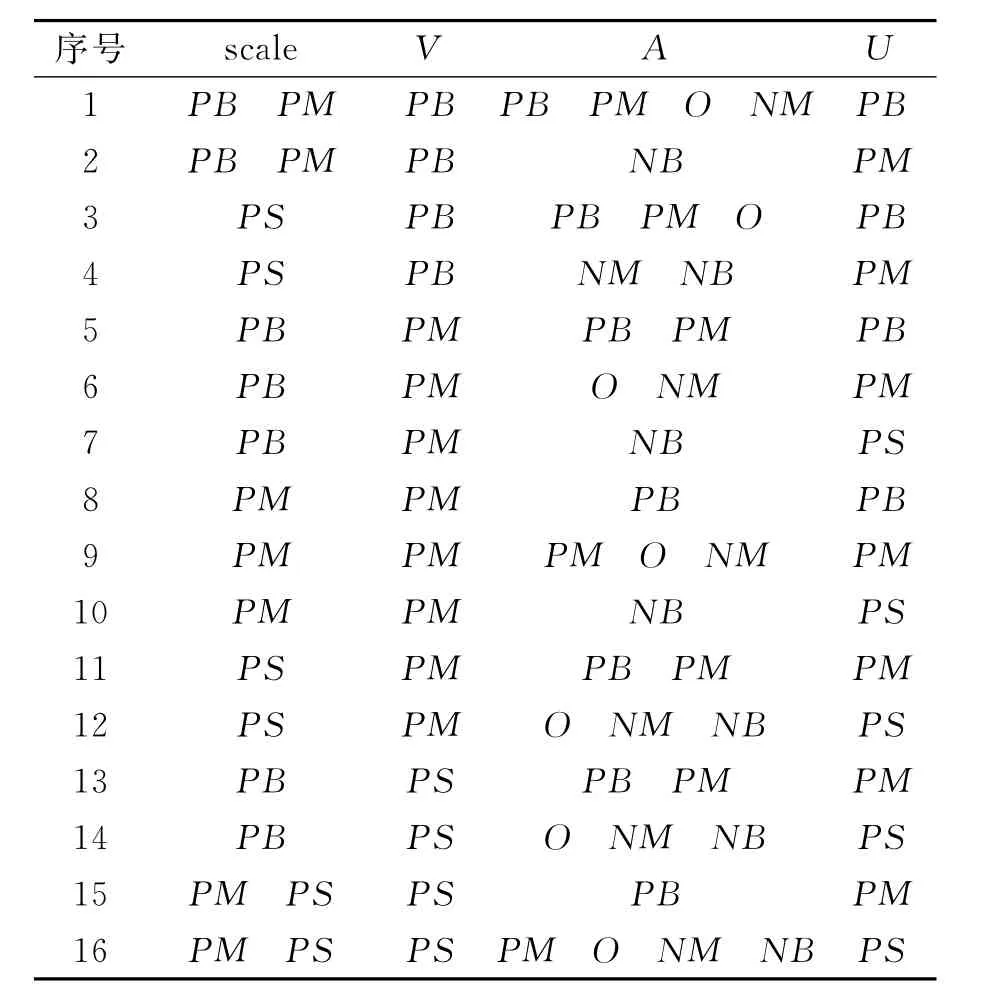
表5 模糊状态表
语言变量U 的模糊子集Uijl有10×13×13=1 690个模糊子集合,应用最大隶属度法对此模糊集合进行模糊判决,编制一个计算程序存储到计算机中.实际控制过程中,在每一个控制周期中,将采集到的驻车时间比例和平均速度以及加速度分别乘以量化因子取得相应论域元素,输入计算程序即可求得输出U所需的论域元素,再乘以比例因子ku,便是输出的实际控制量变化值.这一部分主要依靠计算机完成.
4 仿真实现
利用matlab/simulink对工况自识别系统进行建 模 如 图 3 所 示[5-6],模 糊 控 制 器 (fuzzy logic controller)输入语言变量驻车时间比例scale、平均速度va、加速度a的隶属函数分别如图4~6所示,输出u的隶属函数如图7所示.图8是输入输出关系曲面图.
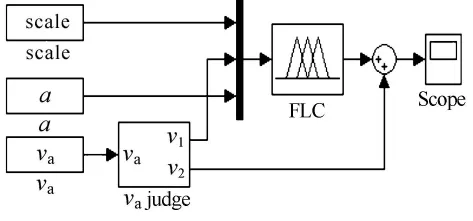
图3 工况自识别系统仿真模型
仿真采用合肥市纯电动汽车示范工程中18路纯电动公交车实验采集的实际行驶数据,其速度-时间曲线如图9所示,将其作为输入,通过仿真得出图10结果.将2幅图进行对比,可以看出原来随意性很强的速度-时间历程已变得有明显特征,分为3个层次,第一个层次是一个低速状态,平均速度在5km/h左右,即为合肥市典型公交工况的A模块;第二个层次是慢速状态,平均速度在15km/h左右,为B模块;第三层次为中速状态,平均速度在28km/h左右,为C模块,高速状态在图中没有出现是因为公交车在行驶过程中平均速度没有超过30km/h.标准化处理后的工况作为输入,可以让能量管理系统按照对应的分类控制策略执行控制,简化了能量管理系统的结构,提高控制效率,也就是降低了能耗.

图5 平均速度隶属函数图
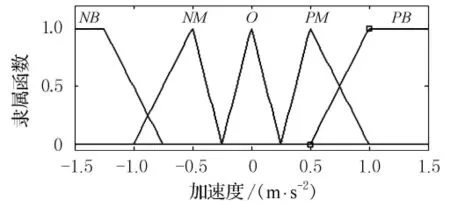
图6 加速度隶属函数图
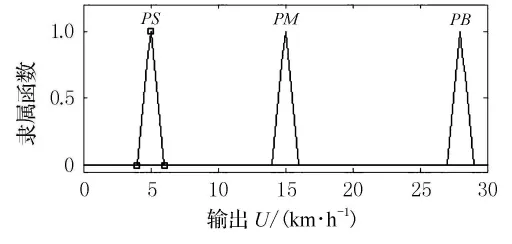
图7 输出U隶属函数图
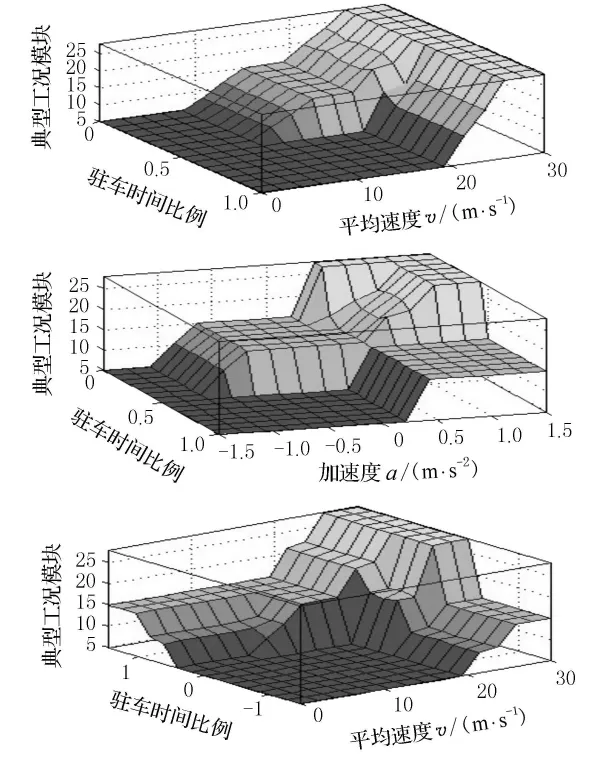
图8 输入输出关系曲面图
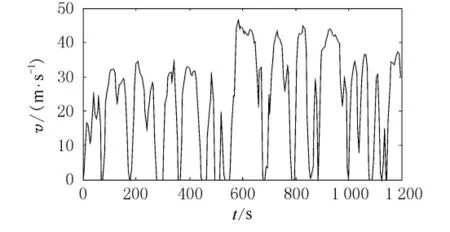
图9 实际行驶工况速度-时间图

图10 自识别后的速度-时间历程图
5 结束语
本文利用合肥市纯电动汽车示范工程采集的数据,开发设计了工况自识别系统.该系统采用模糊控制原理,以行驶阶段的驻车时间比例、平均速度和加速度作为模糊控制器的输入,合肥市纯电动公交工况典型模块参数为输出.给出了系统的控制策略,制定了各个语言变量的赋值表和模糊状态表,并使用SIMULINK搭建了仿真模型,仿真结果显示原来随机的、不确定的工况已转化为符合典型工况模块特征的工况,说明开发的纯电动公交工况自识别系统是可行的.使用这些整定后的工况作为能量管理系统的输入可以简化能量管理系统的结构,提高控制效率,降低能耗,同时也为控制策略的优化提供了思路.
[1]罗玉涛,胡红斐,沈继军.混合动力电动汽车行驶工况分析与识别[J].华南理工大学学报:自然科学版,2007,35(6):8-13.
[2]Ehsani M,Gao Y,Gay S E,et al.Modern electric,hybird electri and fuel cell vehicles fundamentals,theory and design[M].北京:机械工业出版社,2008.
[3]曾光奇.模糊控制理论与工程应用[M].武汉:华中科技大学出版社,2006.
[4]张国良.模糊控制及其MATLAB应用[M].西安:西安交通大学出版社,2002.
[5]李 颖.Simulink动态系统建模与仿真基础[M].西安:西安电子科技大学出版社,2004.
[6]贾秋玲.基于 Matlab 7.x/Simulink/stateflow系统仿真、分析及设计[M].西安:西北工业大学出版社,2006.
