内置式永磁同步电动机弱磁控制的简化方法*
2012-03-06罗德荣孙文娇刘建成
罗德荣,孙文娇,高 剑,刘建成
(湖南大学电气与信息工程学院,湖南长沙 410082)
内置式永磁同步电动机弱磁控制的简化方法*
罗德荣†,孙文娇,高 剑,刘建成
(湖南大学电气与信息工程学院,湖南长沙 410082)
针对直流侧母线电压对永磁电机扩速限制的问题,提出了一种基于电压坐标系的简化弱磁控制方法.由传统的基于电流坐标系的矢量控制转换到电压坐标系下进行分析,推导出电压坐标系下的转矩表达式,根据极限电压控制电流分量,得到相应的弱磁控制策略.理论分析和仿真实验表明该方法简化了计算过程,最大限度地利用直流侧电压,扩速范围更广,具有良好的动态响应.
内置式永磁同步电动机;弱磁;电压坐标系
与传统电励磁电机相比,内置式永磁同步电动机具有体积小、质量轻、损耗小、效率高、结构简单、运行可靠等显著优点,在高性能、转矩响应快速性的场合具有很好的应用前景,所以在电动汽车中采用永磁同步电动机驱动成为发展趋势[1].但是,由于永磁同步电动机的励磁不可调,无法在高速下进行恒功率运行.因此,扩展永磁同步电动机的高速范围,增强其恒功率弱磁运行能力,成为永磁电机控制的热门课题之一[2].
目前,针对永磁电机弱磁控制提出了很多方案,文献[3]通过控制定子电流与直轴的夹角控制定子电流,从而控制转矩.文献[4]提出基于电机的数学模型计算对应转速的直轴去磁电流,交轴电流分量由转速差值经过PI得到.文献[5]介绍了一种基于电机数学模型,根据电机参数,利用解析法求解出电机弱磁控制时的电流分量id,iq,将其作为电流控制指令值.文献[6-7]采用查表法实现永磁电机弱磁的优化控制.文献[8]提出一种新型的单电流控制方法,与传统控制方法采用两个电流调节器不同,单电流控制只采用一个电流调节器.
本文基于电压坐标系分析内置式永磁同步电机的弱磁特性,得到相应的电流控制信号,构建出弱磁控制模型,并利用MATLAB/Simulink工具进行了数学仿真,验证了该弱磁方法的有效性.
1 永磁同步电动机弱磁控制原理
1.1 数学模型
为了分析永磁同步电动机的矢量控制原理,首先建立其数学模型.忽略电动机的铁心饱和、涡流和磁滞损耗,得到稳态时的永磁电机的dq轴数学模型如下.
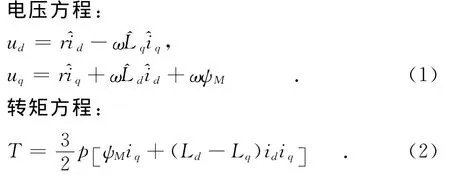
式中:ud,uq分别为电压d,q轴分量;id,iq分别为电流d,q轴分量;r为定子电阻;Ld,Lq分别为电感d,q轴分量;ω为电角速度;ψM为永磁体产生的磁链;p为极对数.
1.2 弱磁控制原理
由于永磁同步电动机的运行性能要受到逆变器的制约,最明显的是电动机的相电压有效值的极限值和相电流有效值极限值要受到逆变器直流侧电压和最大输出电流的限制,因此:

式中:imax,umax分别为电流和电压的极限值.
当电机高速运行时,电机定子电阻远小于电抗,则电阻r可以忽略不计,由电压方程式(1)可得:

传统的永磁同步电机弱磁控制主要基于电流d-q轴坐标系,分析恒转矩曲线和电压电流极限曲线进行求解,从而得到控制电流给定分量.由于IPMSM的电压限制曲线在id-iq坐标系中为椭圆,直接进行分析和求解过程十分复杂,并且受电机参数影响较大,控制性能较差.因此,对于内置式永磁同步电机的矢量控制通常采用查表法,其主要缺点是,工作量巨大,并且对于不同的电机需要建立不同的查询表,适用范围受限.
2 简化的弱磁控制算法
由弱磁控制原理可知,在基速以上,电机的调速性能主要受到直流侧电压的限制.本文提出一种将电机弱磁特性由电流坐标系转换到电压坐标系下,从而简化分析和求解过程的方法.
忽略定子电阻r,由式(1)可得到id-iq坐标系转换到ud-uq坐标系的变换方程:
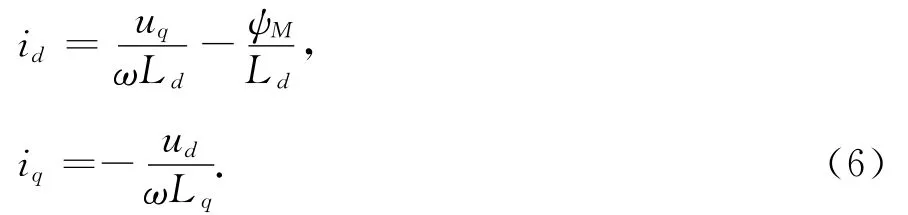
将式(6)代入转矩方程(2)中,得到电压d-q轴下的转矩表达式.

由式(7)可以看出,电机的转矩与转速有关.这是因为当电机运行在弱磁区时,端电压受到直流侧电压限制无法恒转矩运行,随着转速的升高,输出转矩减小.由式(7)可得到电机的输出功率Po:

为控制电机在弱磁区恒功率运行,即控制功率Po为常量.根据式(8),电机的输出功率为电压d-q轴分量与转速的函数.由此得到电机在ud-uq坐标系下的恒功率运行曲线如图1所示.
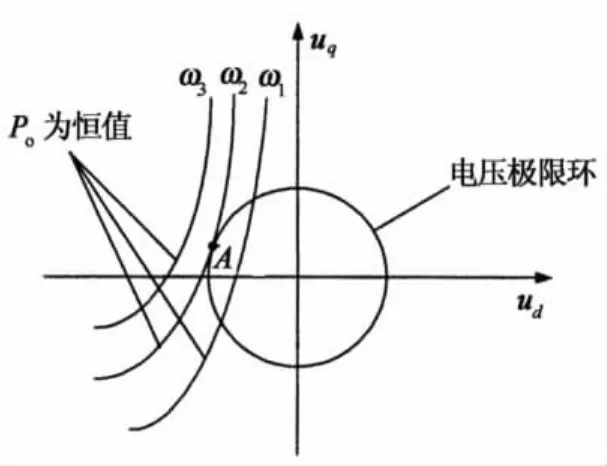
图1 IPMSM恒功率运行特性曲线Fig.1 IPMSM constant power operation characteristic curve
图1中,ω为IPMSM额定功率输出时电压特性曲线,其中转速ω1<ω2<ω3.由图1可知,当ω>ω2时,电机端电压超过了极限电压,无法继续恒功率运行.因此,ω2为电机恒功率运行的最高转速.A点对应为电机恒功率运行在最高转速时的工作控制点.为了使电机恒功率扩速范围最大,在弱磁区可采用极限电压环轨迹进行控制.另外,采用极限电压环控制可充分利用逆变器,提高直流侧电压利用率.
由式(8)和式(4)可以得到电压极限时的电压分量ud和uq.
永磁同步电动机矢量控制通常采用电流调节器,因此,将电压信号转换为电流信号进行控制.电压方程(1)变形得到:
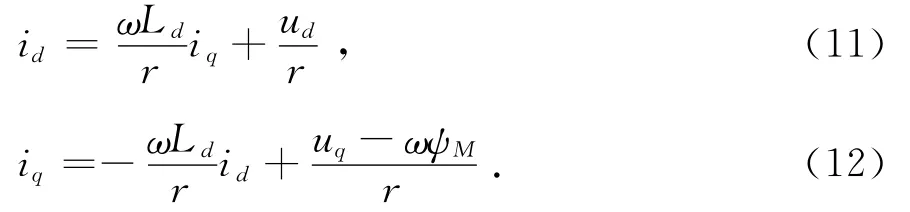
由式(12)可知,对于一定的转速ω,iq由id和uq决定.根据式(9)和式(10)可得到),将其作为控制iq的信号,每个转速ω对应唯一一个uq.则此时iq仅由id决定.由于电机的转矩取决于定子电流,因此在控制uq后,仅通过控制id便可控制电机的转矩.由式(12)根据计算所得的uq和实际电流id便可得到q轴电流给定信号,实现电压到电流控制的转换.此方法可以保证电机运行在弱磁区的任何时刻电流矢量轨迹始终在电压极限.图2为弱磁控制简化方法的控制简图.
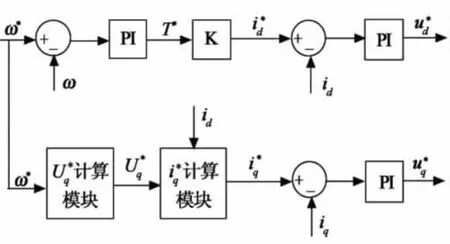
图2 简化弱磁控制简图Fig.2 Simplified flux-weakening control diagram
本文提出的弱磁控制方法基于ud-uq坐标系,相对于id-iq坐标系电压限制曲线由椭圆转换为圆形曲线,减少了分析与计算复杂程度,简化了建模结构.与查表法相比,省去了建表的工作量,并且适用于不同的电机.直轴去磁电流分量的给定值通过转速差经过PI调节自动得到,通过调节PI可以得到较快的响应速度.电机运行于极限电压,充分利用直流侧母线电压,扩速能力更强.
3 仿真结果及分析
本文基于MALAB/Simulink建立了内置式永磁同步电机矢量控制的仿真模型.由于本文介绍的控制算法适用于弱磁区控制,为了实现电机全速范围内调速性能最好,根据实际转速与基速比较判断,基速以下采用最大转矩/电流控制方式,基速以上采用简化的弱磁控制方式.
图3为IPMSM控制系统框图.其中永磁电机模型为一汽车驱动电机,参数如下:基速n=1 500 r/min,极对数p=4,定子电阻r=0.011 532 5Ω,d轴电感Ld=0.000 135 H,q轴电感Lq=0.000 283 H,磁链ψM=0.047 Wb,直流侧电压Udc=72 V.
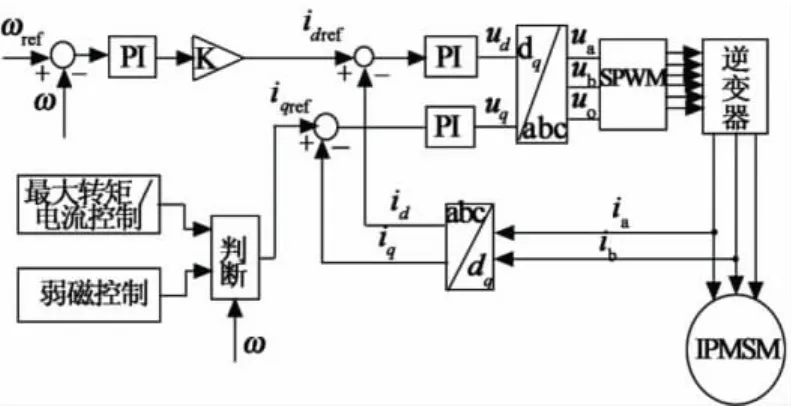
图3 IPMSM控制系统框图Fig.3 Control system diagram
为了验证弱磁控制系统的动态响应和扩速性能,分别对简化方法和传统方法进行了仿真,传统方法基于电流坐标系计算控制电流分量.速度给定1 500 r/min,转矩20 Nm起动,到达稳速后,在0.2 s时刻转速由1 500 r/min突变为3 000 r/min,在0.6 s时刻负载突然增加至40 Nm.图4是采用简化弱磁控制方法的定子电流分量.从仿真结果可知,电机以最大电流/转矩起动,电流最小;转速升高,d轴去磁电流增大,q轴电流减小;加载后,为维持转速不变,定子电流有所增加.图5为不同方法下的转速响应和定子电流.采用简化方法转速上升时间更短,定子电流相对更小.图6为最大调速范围,由图6可知,采用简化方法扩速能力更高.
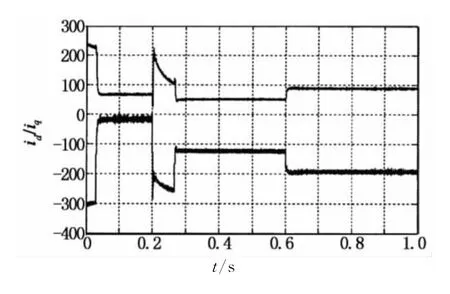
图4 简化弱磁方法定子电流分量Fig.4 Stator current component with simplified method
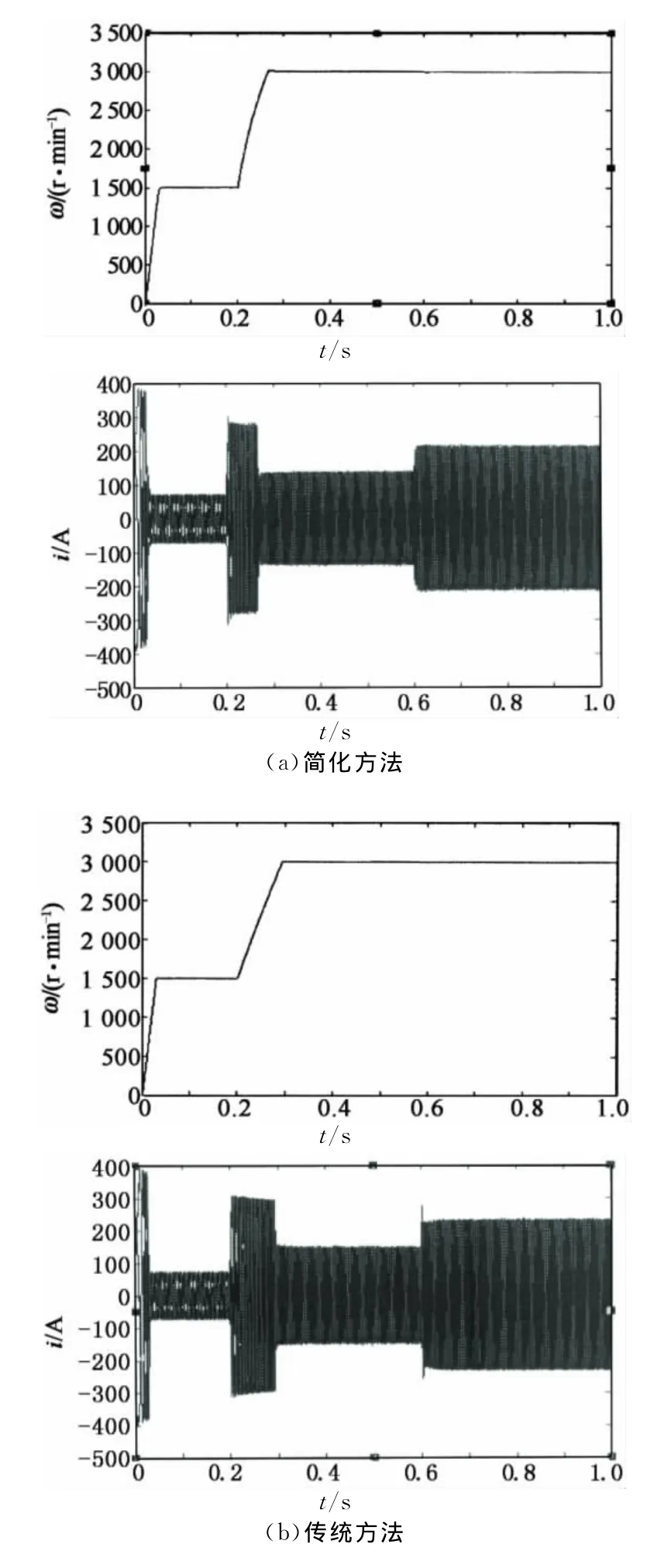
图5 不同方法下的转速响应和定子电流Fig.5 Speed step response and stator current
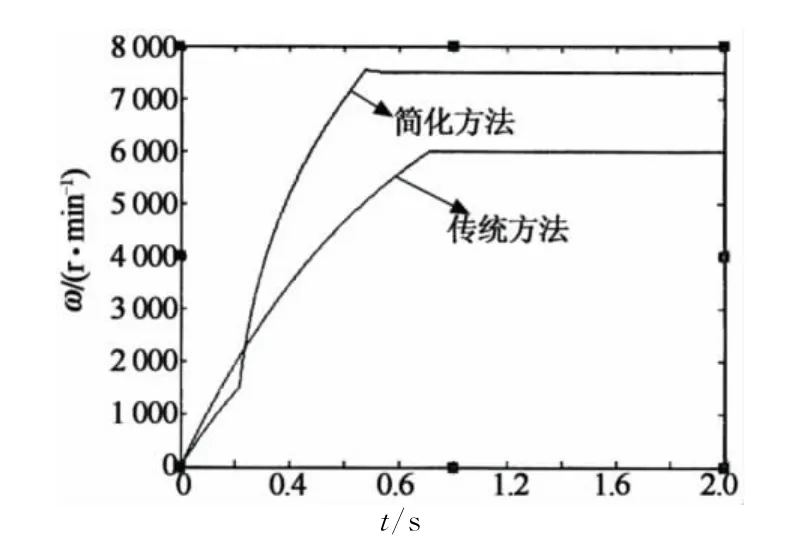
图6 最大调速范围Fig.6 Maximum speed range
4 结 论
本文基于ud-uq坐标系对内置式永磁同步电动机弱磁控制进行了理论分析,建立了简化后的IPMSM弱磁控制模型,并通过MATLAB/Simulink进行了仿真研究,仿真结果验证了该方法的正确性,并与传统弱磁控制方法比较,显示出了本文方法的优点.为以后将该方法运用到电动汽车永磁同步电机驱动的研究提供了参考.
[1] ANDREESCE G D.Adaptive observer for sensorless control of permanent magnet synchronous motor drives[J].Electric Power Component and Systems,2002,30:107-119.
[2] 张开明,钱东波,陈杰.永磁同步电动机弱磁控制的设计[J].微特电机,2009(6):41-45.
ZHANG Kai-ming,QIAN Dong-bo,CHEN Jie.Electromagnetic design of PMSM with flux-weakening[J].Small &Special Electrical Machines,2009(6):41-45.(In Chinese)
[3] KRISHNAN R.Control and operation of PM synchronous motor drives in the field-weakening region[C]//Proceedings of the IECON’93.New York:IEEE,1993:745-750.
[4] MORIMOTO S,SANADA M,TAKEDA Y.Wide-speed operation of interior permanent magnet synchronous motor drivers[J].IEEE Transactions on Industry Applications,1994,30(4):1632-1637.
[5] VACLAVEK P,BLAHA P.Interior permanent magnet synchronous machine field weakening control strategy-the analytical solution[C]//Proceedings of the Sice Annual Conference(2008).New York:IEEE,2008:753-757.
[6] MEYER M,BOCKER J.Optimum control for interior permanent magnet synchronous motors(IPMSM)in constant torque and flux weakening range[C]//Proceedings of 12th International Power Electronics and Motion Control Conference.New York:IEEE,2006:282-286.
[7] ZORDAN M,VAS P,RASHED M,S.etal.Field-weakening in high-performance PMSM drives:a comparative analysis[C]//Conference Record of the 2000 IEEE Industry Applications Conference.New York:IEEE,2000:1718-1724.
[8] CHI S,ZHANG Z,XU L.A robust,efficiency optimized flux-weakening control algorithm for PM synchronous machines[C]//Conference Record of the 2007 IEEE Industry Applications Conference.New York:IEEE,2007:1308-1314.
Simplified Flux-weakening Control Method for Interior Permanent Magnet Synchronous Motors
LUO De-rong†,SUN Wen-jiao,GAO Jian,LIU Jian-cheng
(College of Electrical and Information Engineering,Hunan Univ,Changsha,Hunan 410082,China)
To address the speed limit of Interior Permanent Magnet Synchronous Motors(IPMSM)due to DC bus voltage,a simplified flux-weakening control method based on voltage coordinate system was presented.The analysis of vector control based on current coordinate system is converted into voltage coordinate system,and the expression of torque based on voltage coordinate is derived.With weakening control strategy,the current components are controlled according to the limit voltage.Theoretical analysis and simulation results have shown that this method has such advantages as simple calculation,maximum efficiency of DC voltage,wider range of speed and good dynamic response.
interior permanent magnet synchronous machine;flux-weakening;voltage coordinate system
TM351
A
1674-2974(2012)01-0057-04*
2011-04-09
罗德荣(1968-),男,湖南望城人,湖南大学副教授
†通讯联系人,E-mail:hdldr@sina.com