基于单目视觉的车牌快速定位方法
2012-02-28杨先勇王会岩周晓莉刘东基宋盼盼
杨先勇 ,王会岩 ,周晓莉 ,刘东基 ,宋盼盼
(1.重庆大学,重庆 400044;2.山东文登师范学校,山东 文登 264400;3.陕西渭河煤化工集团有限公司,陕西 渭南 714000)
高速公路上车辆踫撞是最常见的交通事故,因此,对前方道路上行驶的车辆进行定位与跟踪是智能辅助驾驶系统研究领域的重要内容。车辆定位与跟踪要求算法具有实时性、快速性和准确性等特点。视频图像包含了大量的图像信息,便于功能扩展,同时,视频设备安装调试简单、成本低廉且实用性强,而单目摄像头法处理的信息量相对较少,处理速度更快。因此,本文采用单目视觉辅助技术对车辆进行检测、定位和跟踪。
目前视觉车牌定位的方法有很多。黄骥等[1]在HSV颜色空间上,根据我国车牌颜色的特点作为车牌区域颜色跳变特征,准确率高,但计算量大,实时性不够。卢雅琴等[2]采用了数学形态学方法进行车牌定位,该方法简单且在背景单一及车牌区域特征明显的情况下有很好的效果,但是复杂背景下车牌定位准确率不高。陆铖等[3]提出采用灰度跳变特征,具有较快的检测速度,但准确性受噪声影响很大。LEE E R等[4]提出以HSV颜色空间为基础的车牌识别系统,使用了Hough变换方法,虽然识别率比较高,但当车身与车牌颜色相近或车牌污染严重时,会大大降低定位准确率。鹿晓亮等[5]考虑到国内车牌的特有特征以及字符间特点,对车牌区域横向扫描,根据阈值来定位车牌,但该方法不适合快速定位的要求。针对快速自动识别系统的要求,根据国内车牌颜色特征及车牌的外廓尺寸的固有特征,本文提出先基于车牌色彩信息选取敏感区域,然后再根据形态学的方法来进行筛选,从而达到快速定位。
1 总体流程

图1 总体流程图
前方车辆的检测与定位算法流程如图1所示,包括以下几个步骤:
(1)特征区域。利用颜色空间理论,选取车牌颜色为特征,确定图像中的敏感区域。
(2)边缘提取。基于 Canny边缘提取算法,对特征区域图像进行边缘提取。
(3)灰度统计。基于图像边缘提取结果,统计每一部分区域长度与宽度的数值。
(4)目标筛选。根据每一部分的长度与宽度的数值比值筛选出车牌。
(5)目标定位。当筛选部分只剩下一个时,即为目标对象。
1.1 敏感特征区域
选择合适的颜色空间模型快速准确地找到敏感特征区域是非常关键的。考虑到实际需要关注的特性,确定RGB颜色空间到HSI颜色空间的转换近似公式[6]。本文强调在各种环境下快速寻找蓝色,对颜色的细节识别要求比较高,要求转换后颜色的分辨力尽可能大,但又要考虑到运算时间尽可能短。因此本文采用分段定义法来近似RGB转换到HSI的关系:

其中,H为色度,S为饱和度,I为亮度,R、G、B为 RGB颜色空间的红、绿、蓝色值,Max=max(R,G,B),Min=min(R,G,B)。
图2为通过颜色特征提取的区域。

图2 蓝色特征区域
1.2 边缘提取
图像边缘含有大量重要的图像特征信息,因此,边缘检测的方法是图像分析与识别领域十分重要的课题。本文中的车牌边缘是一个非常重要的信息,利用这个信息可以从第一步选取出的敏感区域中快速筛选和确定车牌。本文引用Canny算子,该算子是一类具有优良性能的边缘检测算子,其基本思想是:先对预处理的图像选择一个高斯滤波器进行平滑滤波,然后采用一种称为“非极大抑制”的技术对平滑后的图像进行处理,得到最后所需要的边缘图像。在实际应用中,Canny算子边缘提取效果良好,边缘线性程度较好且完整,线型较细,具有良好的抗噪性能和边缘定位精度。本文利用Canny算子进行边缘提取的结果如图3所示。
图3 边缘提取后图像
1.3 灰度统计与目标筛选
为了准确地筛选出目标车牌,根据车牌特有的信息对边缘信息进行边缘提取后,分两步筛选出目标车牌。
(1)利用车牌边缘的边长比例关系筛选。首先分割出每个独立的有连续边缘的图像块,若大图像块内有小的图像块,则小图像块不作单独处理,统计图像块在水平方向和垂直方向的灰度像素统计,统计完成后,计算水平方向和垂直方向灰度像素比值t。车牌是一个440×140的矩形,车牌的长宽比为3.14,考虑到摄像机记录车牌的角度变化等各种因素的影响,确定阈值上限为5,阈值下限为 2.5,若计算出来的比值 t在 2.5~5之间,则认为是目标车牌。
(2)利用车牌的直角关系筛选。车牌在长度和宽度的接连处是一个垂直关系,因此,本文利用车牌的直角关系可以快速地筛选出绝大部分非目标物体。以筛选左边直角为例,从分割出的图像块从上往下、从左往右开始扫描,当到扫描到第一个点时,以该点为中心点,计算中心点向下边缘线和中心点向右边缘线的夹角θ。考虑到摄像机记录时产生的形变及车牌角度的变化等因素对图像坐标系中夹角的影响,确定在一定阈值范围内的角度即为直角范围,本文中采用的阈值上限为105°,下限为 85°。若计算所得夹角 θ在 85°~105°之间,则认为是目标车牌。
1.4 目标定位
经过两个特征关系的筛选后,目标车牌即可被筛选出来。目标车牌提取出来后,记录下车牌的大小及在图像中的位置。为了方便能更快速地定位从摄像机中提取的下一帧图像,本文采用一种新的搜索方法,即以已经确定的目标车牌为中心,四周按一定比例进行面积扩大。本文从摄像机中按10帧/s的速度提取图像,即两帧图像间隔为 0.1 s,而车辆的速度为 60 km/h~100 km/h,因此在0.1 s间最大的相对行驶速度为(100-60)km/h,最大的相对行驶距离为 40 km/h×0.1 s=1.1 m。根据摄像机的相关原理,算出图像坐标系中车牌的大小的变化率在10%以内,因此,本文选择按扩大长度的10%和宽度的10%作为下一帧图像的大小范围。图4所示为第1次定位所用时间,图5所示为第2次定位所用时间。

图4 第1次定位时间 图5 第2次定位时间
2 实验结果与分析
本文选用不同背景、不同光照下拍摄的100幅车牌图像对本算法进行仿真实验,结果如表1所示。可见准确定位率达到92%。若对连续运动的图像进行跟踪定位,本算法第1次定位时间较长,达到1.13 s,第 2次及以后定位时间大幅度减少,平均为 0.65 s,只有第1次定位时间的57.5%,速度得到很大的提升。由于算法采用HSI颜色空间理论,因此受光线影响不大。本文主要研究了对前车辆的快速定位和车牌预处理,利用车牌的颜色对车牌的敏感特征区域进行了提取,再利用车牌的形态特征进行目标车牌筛选,最后通过对车牌进行图像几何校正,提取出精确的车牌。通过该方法,前方车辆得到了快速检测与定位。仿真实验表明,该方法快速、高效,满足实时性的要求,并且有较高的鲁棒性,为下一步车辆的距离计算提供了良好的保障。
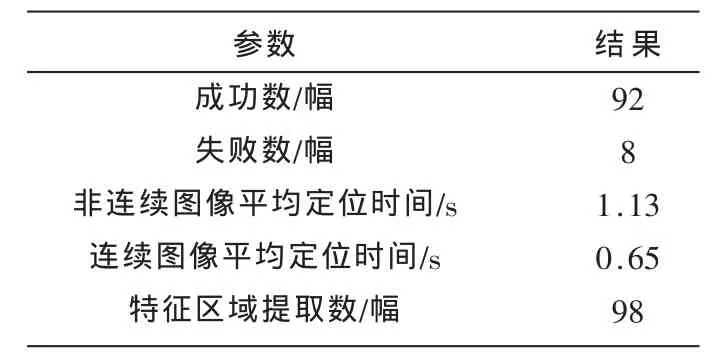
表1 车牌定位结果
[1]黄骥.汽车牌照识别系统中车牌定位与校正及字符分割的研究[D].南京:南京航空航天大学,2007.
[2]卢雅琴,邬凌超.基于数学形态学的车牌定位方法[J].计算机工程,2005,31(2):224-227.
[3]陆铖,何东健,何晓.基于扫描线和特征筛选的车牌定位快速算法[J].计算机工程与设计,2008(10):5125-5128.
[4]LEE E R,KING P K.Automatic recognition of a car license plate using color image processing[J].Journal of Korea Institute of Tele-matics and Electronics,1995,24(2):128-131.
[5]鹿晓亮,陈继荣.复杂背景下快速车牌定位方法研究[J].计算机仿真,2006,23(7):256-259.
[6]刘华波.RGB与HIS颜色模型的转换方法对比研究[EB/OL].中国科技论文在线,2008.