高速公路绿篱修剪机运动学仿真分析
2012-02-20欧阳天成梁燕成陈树勋
欧阳天成,梁燕成,陈树勋
(广西大学 机械工程学院,广西 南宁 530004)
当今绿篱修剪机被广泛应用于高速公路绿篱修剪和园林美化,大幅度提高了工作效率。今后绿篱修剪机将朝着一机多用、自动化程度高、适应性强、工作可靠、环保等方面发展。基于这一思想,并参考现有修剪机的设计方法,本文设计出了一款结构简单、功能优越的高速公路绿篱修剪机,如图1所示。该修剪机不仅能在高速公路和园林上进行绿篱修剪,还可以在公园、城市小区的草坪上割灌。修剪机的工作原理大致为:液压马达驱动回转平台,调整工作臂的空间位置;举升液压缸驱动举升臂绕基座旋转,调整工作臂的修剪高度;伸缩液压缸驱动伸缩臂,调整修剪机构修剪距离;翻转油缸驱动刀架盘旋转,调整修剪机构作业角度;修剪电机通过皮带驱动刀片旋转;承载车向前移动,修剪机向前推进作业。
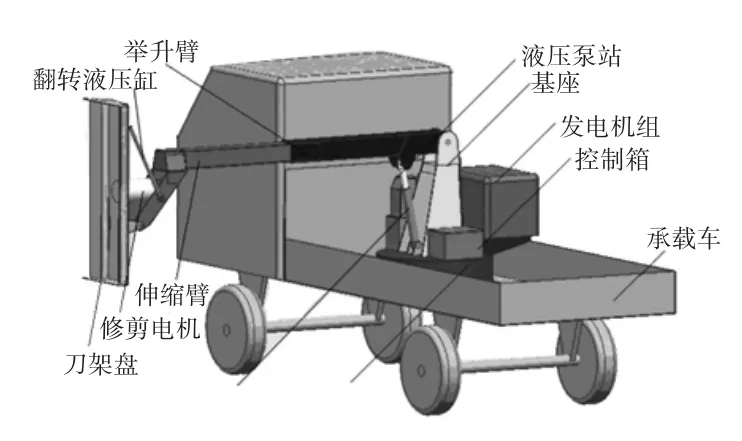
图1 修剪机设计结构总成
为了验证设计的可行性,需使用ADAMS软件进行运动学仿真分析。仿真结果表明,修剪机的运动参数符合所设计的要求,各构件间没有出现干涉和“死点”问题,所选的液压缸满足使用要求,达到了预期的设计效果。
1 修剪机运动学仿真分析
修剪机运动学仿真的目的:检验运动干涉和“死点”问题;获得修剪机主要技术参数;提取液压缸作用力。运动机构“死点”是指:当从动件上的压力角为90°,驱动力对从动件的有效回转力矩为零,这个位置称为机构的死点位置。修剪机运动学仿真分析如下。
1.1 建立模型,添加运动副
仿真的CAD模型在UG中建立,如图2所示,此时的修剪机为装车转场状态。将模型导入ADAMS后,在各连接构件间添加相关的运动副,运动副所在的位置和性质如图3和表1所示。

图2 修剪机仿真模型
21.2 计算修剪机模型的自由度
模型中有16个运动构件、8个固定副(承载车与大地固接)、8个低副、2个高副和4个驱动副,则模型的自由度为

施加4个驱动约束后,模型的自由度为0,则模型的运动轨迹已确定。

图3 修剪机运动副约束位置

表1 四种运动副约束
1.3 制定修剪机的运动方案
虚拟仿真模拟修剪机六个极限作业姿态和转场运输姿态,以此来检验修剪机设计方案的合理性以及在任意时刻的运动状态,每个修剪姿态作业时间为15 s,280 s完成7个修剪姿态。运动方案如表2所示。
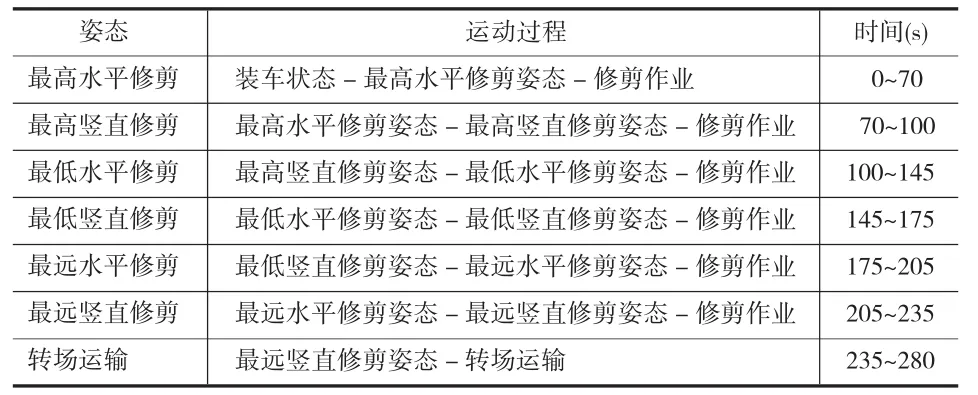
表2 修剪机的运动方案
1.4 对模型施加驱动副
根据模型运动特点,决定采用ADAMS库函数里的三次多项式构造STEP阶跃函数作为液压缸中移动副的驱动函数,STEP函数的具体表达式为:

式中,
X为自变量;
X0为阶跃函数起点自变量值;
H0为阶跃函数起点函数值;
X1为阶跃函数终点自变量值;
H1为阶跃函数终点函数值。
根据修剪机运动方案定义STEP函数,用时间(time)表示X;液压缸初始时间表示X0;液压缸初始伸长量表示H0;液压缸终点时间表示X1;液压缸终点伸长量表示H1。
按照修剪机的运动方案,把液压缸活塞杆的伸长量定义为时间(time)变化的函数,采用以下函数来描述三对液压缸和回转支承的运动:
(1)举升液压缸的移动副驱动函数
STEP(time,0,0,20,255)+STEP(time,20,0,100,0)+STEP(time,100,0,130,-387)+STEP(time,130,0,145,0)+STEP (time,145,0,160,29)+STEP(time,160,0,175,0)+STEP(time,175,0,190,141)+STEP(time,190,0,235,0)+STEP(time,235,0,255,100)+STEP(time,255,0,270,0)+STEP(time,270,0,280,-138)
负号表示移动副沿正方向的反向运动,即沿活塞杆缩进方向运动。
(2)伸缩液压缸的移动副驱动函数
STEP (time,0,0,35,0)+STEP (time,35,0,55,1100)+STEP(time,55,0,235,0)+STEP(time,235,0,255,-1100)
(3)翻转液压缸的移动副驱动函数
STEP (time,35,0,55,486)+STEP (time,55,0,70,0)+STEP (time,70,0,85,-321)+STEP (time,85,0,100,0)+STEP (time,100,0,130,179)+STEP(time,130,0,145,0)+STEP(time,145,0,160,-402)+STEP(time,160,0,175,0)+STEP (time,175,0,190,490)+STEP(time,190,0,205,0)+STEP(time,205,0,220,-409)+STEP(time,220,0,235,0)+STEP(time,235,0,270,0)+STEP(time,270,0,280,-23)
(4)回转支承的转动副驱动函数
STEP (time,20,0,35,-90d)+STEP(time,35,0,255,0)+STEP(time,255,0,270,90d)
2 修剪机的运动学仿真结果
2.1 运动学仿真动画
在仿真计算后,可获得修剪机的运动轨迹动画。其中有六个重要的极限位置,即最高水平、竖直修剪,最低水平、竖直修剪,最远水平、竖直修剪,它们的动画截图如图4所示。

图4 修剪机极限位置
2.2 运动学仿真数据处理
经过仿真计算后,产生的各类数据已存在ADAMS的数据库里,在ADAMS中对仿真分析的结果进行数据处理的目的:
(1)通过在刀架盘上、下防护裙和地面处定义标记点,获得修剪机最高水平、最高竖直修剪高度;最低水平修剪高度、最低竖直修剪高度;最远水平修剪距离和最远竖直修剪距离。
(2)提取举升臂水平夹角。
(3)提取举升液压缸、伸缩液压缸、翻转液压缸负荷。
280 s完成7个修剪姿态运动学仿真后处理,相关图表如图5~图10所示。

图5 修剪高度参数

图6 修剪距离参数
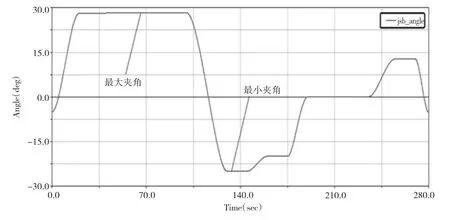
图7 举升臂水平夹角

图8 举升液压缸负荷

图9 伸缩液压缸负荷

图10 翻转液压缸负荷
通过运动学仿真可以得到修剪机主要作业参数的仿真值,并将其与设计值对比,校核设计方案能否达到设计要求。仿真值与设计值比较如表3所示。

表3 仿真值与设计值比较
仿真结果表明,修剪机在作业过程中各个运动构件没有发生运动干涉和出现“死点”问题,由于ADAMS仿真计算是通过STEP函数控制,计算步长不是无限小,所以STEP函数会出界,导致运动学仿真获得的作业范围与设计值存在一定的差异,但这些差异都控制在设计要求允许的范围之内,修剪机设计方案符合实际要求。
2.3 仿真数据的验证
为了进一步给校核修剪机液压缸和为液压缸的选择提供负荷特性参考,可以把初始选配液压缸的数据与仿真模型中对应的数据进行比较。本文分别校核举升液压缸、伸缩液压缸和翻转液压缸的最大输出力。
根据液压缸企业提供的资料,初选定的三种液压缸额定输出压力都为16 MPa,活塞杆外径分别为36、28、22 mm,三种液压缸最大输出力的仿真值与额定值比较如表4所示。

表4 液压缸仿真值与额定值比较
通过表4得知,三种液压缸的最大仿真输出压力都小于额定输出压力,所以初步选配的液压缸符合设计要求。
3 结束语
通过ADAMS对所设计的高速公路绿篱修剪机进行运动学仿真分析。仿真后所获得的修剪机运动参数和液压缸参数均满足设计要求,并且各构件间未发生干涉和“死点”问题,从而证明了该设计的可行性。
[1]曹海东.高速公路养护机械设备与管理[J].辽宁工程技术大学学报(自然科学版),2011,30(5):208-210.
[2]孟俊焕,王卫东,刘 敏.园林绿化机械设备的现状与发展趋势[J].农业装备与车辆工程,2006,174(1):4-5.
[3]郑建荣.ADAMS虚拟样机技术及提高[M].北京:机械工业出版社,2002.
[4]李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社,2006.
[5]李 军.ADAMS实例教程[M].北京:北京理工大学出版社,2002.
