基于滑模控制的异步电机无速度传感器DTC研究
2012-02-15朱威威薛重德申友涛
朱威威,薛重德,申友涛,徐 俊
(南京航空航天大学 江苏 南京 210016)
直接转矩控制(DTC)是继矢量控制之后发展起来的一种高性能的交流调速控制理论,该理论自1985年提出以来,就以新颖的控制思想、简洁明了的系统结构、优良的动、静态性能而得到了广泛的关注。无速度传感器技术与直接转矩控制技术的结合进一步提高了电机控制系统的性能,是目前交流调速领域的研究热点和发展趋势。
目前较为常见的无速度传感器转速辨识算法有模型参考自适应法、全阶磁链观测器、卡尔曼滤波、人工智能等。模型参考自适应和全阶磁链观测法通过合理的参数选择能够得到较理想的控制效果,但在转速估算过程中需要用到转速信息,转速误差反馈到计算过程中,影响计算精度;卡尔曼滤波估算的转速精确度高,但计算量大,计算时间长;人工智能法需要积累大量的专家知识,系统设计较为复杂[1]。文献[2]提出了一种基于滑模变结构控制的无速度传感器控制技术,建立了控制模型,分析了滑模存在的条件,但所建立的滑模控制器结构复杂,引入的参数过多;文献[3]提出的滑模速度辨识算法用到两个电流滑模观测器,电流估算过程需要用到转子时间常数和转速等信息,对转速的精确辨识产生影响。
文中应用滑模变结构控制理论,提出了一种结构简单的速度辨识算法,运用滑模控制理论对定子电流和转子磁链进行估算,转子磁链的估算不涉及转子时间常数和转速等信息,提高了系统的鲁棒性。利用Lyapunov稳定性原理分析了算法的稳定性,并结合空间电压矢量脉宽调制技术(SVPWM)和直接转矩控制技术(DTC),建立了一种新型的无速度传感器控制系统。仿真结果表明,该方法能很好的实现对转速的辨识和对转矩、磁链的控制。
1 基于空间电压矢量的直接转矩控制
直接转矩控制通过检测电机定子电压和电流,借助瞬时空间矢量理论计算电机的磁链和转矩,并根据与给定值比较所得的误差,实现对磁链和转矩的调节[4]。磁链和转矩调节输出的信号经过空间电压矢量脉宽调制的处理,得到恰好能够补偿磁链和转矩误差的控制量,用于对电机进行控制,使得磁链和转矩构成闭环控制,提高控制性能。在定子磁链坐标系下异步电机的状态方程如下[5]:

其中us和is分别是定子电压和定子电流;Rs是定子电阻;ψs是定子磁链;ωψs是定子磁链角速度。
定子电压的两个正交分量分别为:


式(2)表明,定子磁链的控制可以通过对定子电压分量usd的调节来实现。
在所设定的参考坐标系下,电机转矩方程为:

式中p是电机的极对数,将式(3)代入式(4)中得:

式(5)表明,通过对定子电压分量usq的调节可以实现对转矩的直接控制。
2 滑模控制器原理
文中所提出的滑模控制器原理框图如图1所示。
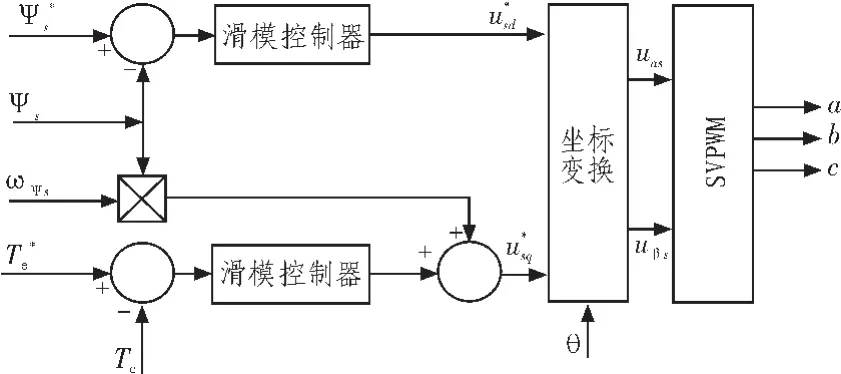
图1 滑模控制器原理图Fig.1 Block diagram of Sliding Mode Controller
采用滑模控制器分别对磁链和转矩误差进行调节,磁链、转矩误差调节器的输出即为定子磁链旋转坐标系中控制定子磁链幅值和定子磁链矢量旋转速度的两个定子电压分量。为了实现对转矩和磁链快速而又准确的控制,根据滑模控制理论设计了两个结构简单的滑模控制器分别对磁链和转矩误差进行控制,原理如下[6-7]:

其中 Sd=ψ*s-ψs为磁链误差;Sq=T*e-Te为转矩误差;sgn 为符号函数。式(6)和(7)的稳定性通过Lyapunov稳定性定理进行证明,其验证与文献[8]中的方法类似,系数k1和k2是两个正数,对这两个系数合理的选择能够使得系统对磁链和转矩误差的控制更加准确。为了充分利用电动机,在实际运行中保持定子磁链的幅值为额定值,稳态时,定子磁链旋转角速度为[9]:

式中δ表示负载角,可以看出定子磁链的旋转速度与转子磁链旋转速度和负载角的变化有关,而负载角的变化与转矩变换有关,且两者变化方向一致,所以负载角的变化量可以通过转矩的变化量来进行确定。得到定子电压的两个分量之后,通过坐标变换和空间电压矢量脉宽调制,得到所需的电信号。
3 速度观测器的设计
3.1 观测器原理
以定子电流和转子磁链作为电机的状态变量,在定子两相坐标系下异步电机的数学模型可以表示为[10]:

其中,Iαs,Iβs为定子电流分量;λαr,λβr为转子磁链分量;uαs,uβs为定子电压分量;Ls为定子电感;Lr为转子电感;Lm为互感;σ=1-L2m/LsLr为漏感系数;Tr=Lr/Rr为转子时间常数;Rr为

式(9)和(10)都包含 S项,且在 α和 β分量上的耦合项也完全相同。针对这一特点,文中采用滑模函数φαr,φβr对电流和磁链进行调节,得到的电流和磁链用于对转速进行估算,构成无速度传感器转速估算模块。在收敛状态下,滑模函数的值即是矩阵S的估算值。

u0是常数,其选择须满足Lyapunov稳定性条件,选择依据在下文中予以论述。分别是观测电流分量和实际电流分量。
所设计的滑模观测器的滑模切换面为:

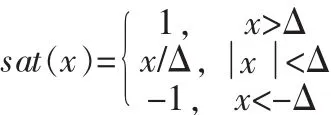
当误差向量到达滑模切换面sn=0时,观测电流收敛为实际电流,即此时磁链估算就是一个对滑模函数的纯积分运算,而不需要用到转子时间常数和转速等信息。式(11)~(16)即为所设计的速度观测器的主要结构,如图2所示。由于滑模变结构控制自身所具有的开关特性,在控制过程中会受到符号函数值的切换所带来的震荡噪声的影响,利用饱和函数sat()代替系统中的符号函数可以有效减小这一不利因素[6]。下式中Δ是一个很小的常数。
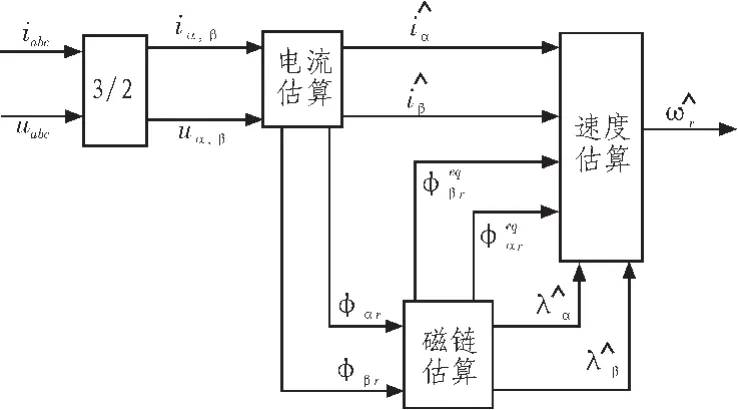
图2 速度观测器原理图Fig.2 Block diagram of Sliding Mode Speed Observer
式(13)给出了磁链的估算方法,即通过对滑模函数的积分来得到磁链。由滑模变结构控制理论可知,在磁链控制过程中滑模函数的取值是高频率地在u0和-u0之间进行切换,这种强烈的非线性切换增加了系统分析的难度,代之以一种连续线性输入,将使系统的分析和观测器的设计得到很大程度的简化[11]。运用滑模控制理论中的“等效控制”原理,得到磁链的等效估算法:


应用滑模变结构控制理论设计的电流估算模块和磁链估算模块结构简单,能够为速度估算提供精确的输入,使整个速度观测器在结构上简单,在估算精度上能达到很理想的效果。
3.2 观测器稳定性验证
式(14)中u0的选择必须保证所设计的观测器在Lyapunov稳定性理论下的收敛性。假设滑模速度观测器的Lyapunov函数为[7]:
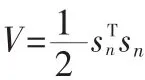
函数V是正定的,要满足Lyapunov稳定性定理,还需要使得,通过式(9)和(12)得:

其中 A=ηλαr+ωrλβr+ηLmIαs,B=ηλβr-ωrλαr+ηLmIβs。 当 u0满足上述要求时,文中所设计的观测器是稳定的。在稳定性条件范围内,不大的u0波动对仿真速度和控制结果影响很小,说明了系统的鲁棒性,但值过小系统本身不稳定,处于强烈的振荡状态,u0值过大会使仿真速度有很大程度的减慢。
4 仿真结果及分析
为了验证文中所提出的基于滑模控制的异步电机无速度传感器DTC控制系统的可行性,利用MATLAB/Simulink软件搭建了整个控制系统并对其进行了仿真实验。该系统采用转矩和磁链的双闭环控制,其中滑模控制器根据转矩和磁链误差以及转速,控制得到电机所需要的参考电压,参考电压再由空间电压矢量脉宽调制(SVPWM)进行优化处理,闭环后能够有效的减小转矩和磁链的脉动。实验所采用的异步电机的各项参数如表1所示。
表1 电机参数Tab.1 Parameters of IM
系统在空载状态下启动,运行一段时间以后加上5 N·m的负载,得到的仿真结果如图3所示。系统在5 N·m的负载状态下启动,运行一段时间以后将负载增加到10 N·m,得到的仿真结果如图4所示。
图3(a)表示电机空载启动,达到给定转速800 r/min后,在0.25 s时突加5 N·m的负载转矩,并同时将给定转速升为 1 000 r/min时的电机转速辨识曲线。图4(a)表示电机在5 N·m的负载状态下启动,达到给定转速800 r/min后,在0.25 s时将负载突加至10 N·m,并同时将给定转速升为1 000 r/min时的电机转速辨识曲线。从曲线可以看出,在空载启动条件下,速度观测器辨识得到的速度无论是在启动阶段还是在稳态运行阶段都能很好的跟踪实际的转速,估算转速和实际转速曲线基本重合;和空载启动相比,在加负载启动条件下,电机启动的瞬间观测器辨识得到的转速和实际转速之间存在一定的误差,之后的动态阶段和稳态运行阶段辨识转速都能很好的跟踪实际转速。仿真结果说明根据滑模原理设计出的速度观测器无论是在动态过程还是稳态过程,对电机转速都具有很好的辨识能力、良好的跟踪性能和抗干扰能力。

图3 电机空载启动仿真结果Fig.3 Simulation results while start without load
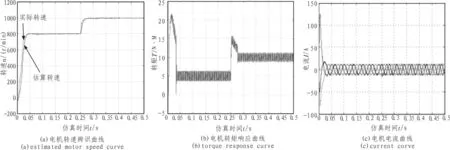
图4 电机负载启动仿真结果Fig.4 Simulation results while start with load
图3 (b)是电机空载启动,运行一段时间后加负载得到的电机转矩响应曲线,图4(b)是电机负载启动,运行一段时间后突变负载得到的电机转矩响应曲线。从曲线可以看出,在空载启动时,启动转矩波动较小,转矩达到稳态需要的时间短;在负载条件下启动时,启动瞬间和突然增加负载时电机转矩波动较大,但转矩的整体响应性能还是很好。仿真结果说明在两种启动状态下,转矩都具有快速的响应能力,转矩误差小,带载能力强。
图3(c)和图4(c)是两种启动状态下电机的电流曲线,从曲线可以看出,除了负载启动阶段电流波动较大以外,在运行过程中得到的电流都很光滑。
5 结 论
文中建立了滑模控制器和滑模速度观测器,运用Lyapunov稳定性理论推出了模型收敛的稳定性条件。滑模控制器和空间电压矢量脉宽调制技术的结合,使得作用于电机的电压控制信号得到了更好的优化,滑模速度观测器减少了电机参数对系统的影响,提高了转速辨识的精度。仿真结果表明这种方法能够很好的实现电机转速的辨识,具有对参数变化的鲁棒性。
[1]郭兴众.直接转矩控制中无速度传感器技术的现状及发展[J].安徽工程科技学院学报,2006,21(2):68-73.GUO Xing-zhong.The present situations and developments of speed sensorless technology in direct torque control[J].Transactions of An Hui institute of technology,2006,21(2):68-73.
[2]ZHANG Yan,CHANG Xi-jin,Vadim I.Sensorless slidingmode control of induction motor[J].IEEE Transactions on Industrial Electronics,2000,47(6):1286-1298.
[3]LI Jing-chuan,XU Long-ya,ZHANG Zheng.An adaptive sliding mode observer for induction motor sensorless speed control[J].IEEE IAS,2004:1329-1334.
[4]李永东.交流电机数字控制系统[M].北京:机械工业出版社,2002.
[5]Lascu C,Trzynadlowski A M.Combining the principles of sliding mode,direct torque control,and space-vector modulation in a high-performance sensorless AC drive[J].IEEE Transactionson Industrial Applications,2004,40(1):170-177.
[6]ZHANG Yong-chang,ZHU Jian-guo,HU Jie-feng,et al.Speed sensorless stator flux oriented control of three-lever inverterfed induction motor drive based on fuzzy logic and sliding mode control[J].IEEE Transactions on Industrial Applications,2010:2932-2937.
[7]Lascu C,Boldea I.Dorect torque control of sensorless induction motor drives:A sliding-mode approach[J].IEEE Transactions on Industrial Applications,2004,40(2):582-591.
[8]ZHANG Yong-chang,ZHAO Zheng-ming,ZHANG Yingchao,et al.A full sliding mode sensorless control of threelever inverter-fed induction motors[J].IEEE Transactions on Industrial Applications,2008:2825-2832.
[9]徐艳萍,钟彦儒,杨惠.一种基于空间矢量调制的永磁同步电动机新型直接转矩控制方案 [J].电工技术学报,2008,23(11):48-52.XU Yan-ping,ZHONG Yan-ru,YANG Hui.A novel direct torque control scheme for permanent magnet synchronous motor based on space vector modulation[J].Transactions of Electrotechnical technology,2008,23(11):48-52.
[10]Rehman H,Derdiyok A,Guven M K,et al.A new current model flux observer for wide speed range sensorless control of an induction machine[J].IEEE Transactions on Power Electronics,2002,17(6):1041-1049.
[11]田宏奇.滑模控制理论及其应用[M].武汉:武汉出版社,1995.
