磁流变弹性体主动式自调谐吸振器控制系统的研究
2012-02-13康存军龚兴龙陈现敏廖国江
康存军,龚兴龙,陈现敏,廖国江
(中国科学技术大学 近代力学系中国科学院材料力学行为与设计重点实验室,合肥 230027)
动力吸振器作为一种常用的减振设备,按是否有源可以分为:主动式,半主动(或者自调谐)式,被动式。
主动式吸振器主要有电磁式[1]和压电式[2]等。主动式吸振器由于其主动元件工艺相对成熟以及普遍良好的减振效果,研究和应用广泛。文献[1]中设计了一种船用柴油机减振的电磁式主动吸振器,并为其设计了基于MLMS的自适应控制率。文献[2]中设计了以压电陶瓷作动器为主动元件的主动式吸振器,并设计了主动力控制程序。然而主动式吸振器能耗大,结构复杂,影响实际应用。
自调谐吸振器的刚度实时可变,以此来满足激励频率变化时的减振需求,其主要有机械式[3-4],智能材料式[6-8],电磁式[9]等。磁流变材料由于其力学特性可由外加磁场连续调节、响应快(ms量级)、可逆性好等优点[5],可以作为自调谐吸振器的弹簧元件,近年来研究广泛。文献[6]中设计了剪切式磁流变弹性体自调谐吸振器,该吸振器通过改变贯穿磁流变弹性体元件的磁场大小来调整吸振器的固有频率,并设计了遗传控制算法[7],但是寻优时间接近2 min。文献[8]中设计了一种拉压式的磁流变弹性体吸振器,并为其设计了类似于天棚阻尼的控制策略。但是这类吸振器由于其阻尼较大,导致减振效果不佳。
自调谐吸振器与主动式吸振器的结合逐渐被关注。文献[10]对基于磁流变弹性体的主动吸振器原理及所需主动力进行了理论分析,结果表明同普通主动式吸振器相比,该类型吸振器所需主动力将大大减小。但其没有完整的控制系统,缺乏实验研究。文献[11]中设计了一种刚度和阻尼都实时可调的吸振器,它的弹性单元采用两条弹性梁制成,改变梁中点的跨距即可调整吸振器的固有频率,主动力采用压电元件来提供,并设计了一种模糊控制策略对其刚度和主动力实施联合控制。实验结果表明该器械能够取得很好的减振效果。但其数据采集由NI公司的数据采集卡(DAQ)完成,控制程序在PC机上运行,其控制系统成本较高,且没有独立的控制器。文献[12]中设计了一种基于磁流变弹性体的主动式自调谐吸振器,该吸振器是磁流变弹性体自调谐吸振器与主动式吸振器的结合,但其控制算法只进行吸振器频率的查表法粗调,且主动力控制增益固定,导致控制精度和稳定性较差,减振效果有限。本文根据该吸振器的自身特点,进行相应的控制系统的研究,提出了一种变步长寻优与反馈控制相结合的控制算法,设计了以TMS320F2812DSP为核心的控制器。控制算法精度较高,寻优时间短;控制器能够独立运行,成本低。并利用该控制系统进行了该吸振器的减振控制实验研究。
1 磁流变弹性体主动式自调谐吸振器
根据文献[6],磁流变弹性体自调谐吸振器的固有频率f计算公式如下:

式中m为吸振器动质量,kτ为磁流变弹性体剪切刚度,k0为支撑弹簧总刚度,G为磁流变弹性体剪切模量,A为磁流变弹性体发生剪切的面积,h为磁流变弹性体厚度。
由式(1)可知,当磁流变弹性体剪切模量G随外加磁场的改变而改变时,剪切刚度kτ将发生改变,从而实现吸振器的移频。
由于磁流变弹性体材料自身的特点,其阻尼比较大,同时又无法从材料本身消除阻尼,而吸振器要保证好的减振效果又必须减小阻尼。理论上吸振器的阻尼降为零,可以完全消除主系统的振动,实现最理想的控制效果[16]。为改善吸振器的减振效果,文献[12]中通过引入主动力来抵消吸振器的阻尼力,从而等效地减小吸振器阻尼,所设计的吸振器结构图如图1所示。动质量块采用封闭式的结构,减小了吸振器尺寸。两只线圈与铁芯组成的磁路部分采用倒装的形式固定在动质量块上,以此提高吸振器质量利用率。两块磁流变弹性体作为变刚度元件固定在导磁回路中,通过改变励磁线圈中的电流得到相应的磁场,进而实现吸振器的移频。导杆用于限制吸振器的振动自由度,使其只能在垂直方向振动。支撑弹簧用来承担吸振器振子的静质量,从而使得吸振器振动时的一部分力由该弹簧承担,减小了磁流变弹性体所承担的力,避免磁流变弹性体因受力过大而撕坏。音圈电机安装在动质量和基座之间,该电机由动子和静子组成。动子为线圈,通过传动机构固定在吸振器的动质量块上;静子为含有永磁铁的磁钢,固定在基座上。改变线圈中的电流即可改变主动力的大小和方向。基于以上设计,所得吸振器尺寸为120 mm×160 mm×160 mm,总质量5 kg,动静质量比4∶1,结构紧凑,质量利用率高。
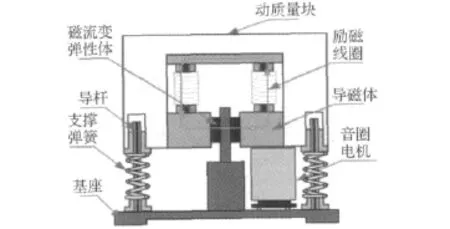
图1 磁流变弹性体主动式自调谐吸振器结构示意图Fig.1 Structural represention of adaptive-active tuned vibration absorber based on magnetorheological elastomers
为了解吸振器的移频性能,以及主动力加入后吸振器动力学特性的变化,在振动台上对主动式自调谐吸振器的动力学性能进行测试,结果表明吸振器有无主动力均能实现一定的移频,加主动力后,吸振器移频范围从12.5~22.5 Hz降到了11 ~20 Hz,这是因为吸振器阻尼减小导致磁流变弹性体应变增加,而磁流变弹性体的剪切模量会随其应变的增大而减小[6]。加入主动力后,吸振器阻尼比从约0.15降到约0.05。
2 控制系统软件设计
对于该主动力的控制,文献[12]中提出了基于吸振器动质量块绝对速度反馈的控制策略,具体公式如下:

式中fact为吸振器所需主动力,ca为吸振器阻尼,x·a为吸振器动质量块振动速度,g为反馈增益,λ为比例系数。
由于在单自由度系统上完成的控制比较简单,只需要观测单个点的振动,但应用不够普遍,现实中大部分情况需要观测多个点。本文利用多模态实验平台[4]进行吸振器的减振控制实验,示意图如图2所示。其减振原理是控制器根据主质量块所受外界激励的变化,实时调节吸振器固有频率来跟踪激励频率,同时根据动质量块速度信号来提供主动力以等效减小阻尼,从而使传入基础的平均振动最小,得到最优总体减振效果。根据文献[17],传入基础的平均振动响应采用基础四个测点处振动响应的加速度的均方根rms来表征(如无特殊说明,文中基础平均振动响应都采用此方法表征)。其中rms的计算公式如下:

式中xi为单个测点处振动响应加速度,N为测点数目。
总体减振效果采用有无吸振器时基础的平均振动响应之比来评价,将其转化为分贝(dB)表示的具体计算如式(4)所示。

式中rmsWith表示安装吸振器时基础的平均振动响应;rmsNo表示不安装吸振器时基础的平均振动响应。
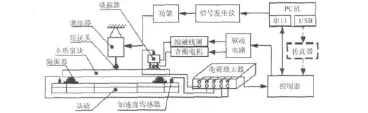
图2 实验系统示意图Fig.2 The experimental set-up
基于该吸振器减振原理,本文控制算法可以实现吸振器频率的寻优调节以及主动力控制增益的自动调节,其实现过程可表述为:利用快速傅里叶变换(FFT)确定激励信号的频率,然后通过变步长寻优算法将吸振器固有频率调至该频率,同时逐步调节速度反馈信号的增益,得到合适的主动力。
本文变步长寻优算法是在变步长过程中,不断比较基础的平均振动响应rms的大小进行寻优,认为其最小值rms0对应的励磁线圈电流值为最优值。
从控制的快速性考虑,每次寻优前先根据式(5),通过查表法进行粗调。

式中i为设定的最小可调电流值。粗调结束后的均方根rms0认为是当前最小值,然后以初始步长h0按照I1=I0+h0i开始寻优的第一步,并计算rms1。以此类推,下一步电流值Ik+1可以根据rmsk与rmsk-1的关系来确定:当rmsk<rmsk-1时,表示基础振动得到改善,则按照式(6)进行原方向等步长调整,同时更新最小值rms0。

当rmsk>rmsk-1时,表示基础振动恶化,则令h0=h0/2,并按照式(7)进行变步长反向调节:

式中Ik,Ik-1分别表示当前和上一次电流值;rmsk,rmsk-1分别表示当前和上一次基础的平均振动响应;k表示当前寻优次数;Num表示最大寻优次数,若该值设置过大,最优值改善不大反而增加寻优时间,此取Num=11。
图3中速度反馈增益g确定以后并不是直接输出,而是伴随电流寻优过程按照g'=g'+gβ(β<1)逐步加大,此为避免突然加大主动力而引起的吸振器失稳。

图3 控制算法流程图Fig.3 The control algorithm flowing chart
3 控制系统硬件设计
考虑控制系统功能及成本,采用TI公司推出的32位高性能数字信号处理器 TMS320F2812[13](简称F2812)作为主处理器,该芯片的相关性能如表1所示。
以F2812为主处理器,本文设计的控制器如图4所示。图4(a)为控制器结构示意图,图4(b)为控制器实物图。由图4可见,除F2812外,控制器主要外围电路包括A/D转换电路、D/A转换电路、电源电路、正交编码脉冲(QEP)电路及通信接口等。
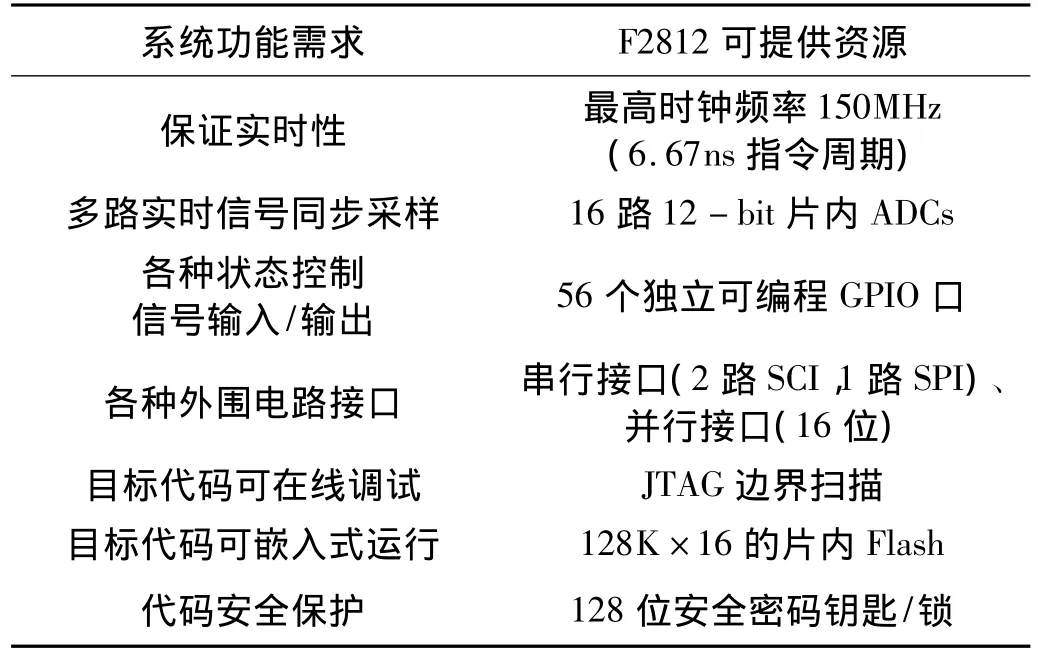
表1 主处理器选择依据Tab.1 The selection gist for main processor

图4 控制器结构示意图和实物图Fig.4 The structure drawing and picture of controller
3.1 A/D转换电路
由于F2812片内ADCs只能接收0~3 V的单极模拟电压,而系统测量的信号为±10 V的双极模拟电压信号,因此,舍弃片内A/D转换器而采用外扩A/D转换电路的设计。其中AD芯片选用美国模拟器件公司(ADI)的AD7656[14],该芯片6通道输入满足了控制系统采集多路信号的需求;16-bit双极性二进制编码保证了系统的高分辨率,同时减小了量化误差;±10 V双极性最大电压输入范围使得系统可以直接完成信号的采集。

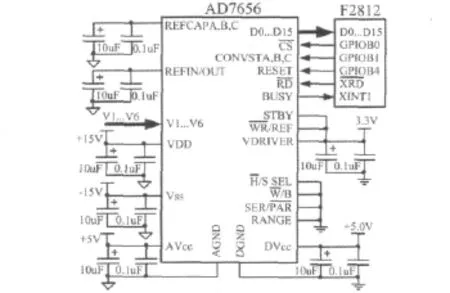
图5 AD7656与F2812的接口电路Fig.5 The connection diagram between AD7656 and F2812
3.2 D/A转换电路
为了满足系统对于两路驱动信号的控制需求,同时保障A/D转换电路对系统分辨率和精度的贡献,选用 ADI的 4 通道 16-bitDACs—AD5754R[15]完成 D/A转换。

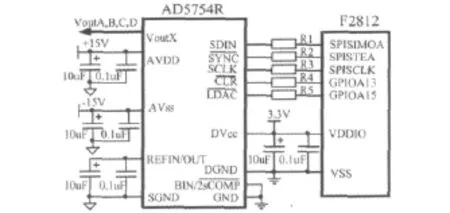
图6 AD5754R与F2812接口电路Fig.6 The connection diagram between AD5754R and F2812
3.3 其它电路及接口
电源电路包括5 V电源和可调式双极性电源芯片TPS65130实现的±15 V电源。
QEP电路可实现位移和速度等高精密(微米级)测量,为吸振器今后的控制研究创造条件,如光栅尺测量吸振器动质量块的位移和速度等。
JTAG接口实现目标代码的在线调试以及烧写Flash,烧写成功后去掉仿真器,控制器实现独立运行。SCI接口实时发送数据给PC机上的LabVIEW监控界面。
4 减振控制实验研究
将目标代码烧写进控制器的Flash,按照图2所示的示意图建立实验系统,完成吸振器在多模态实验平台上的减振控制实验,以验证该控制系统的有效性,同时评价吸振器的性能。其中,实验平台主质量块300 kg,尺寸为1 000 mm×600 mm×70 mm。实验中吸振器安装在激励力附近振动较大的一侧,同时基础的四个橡胶隔振器附近布置加速度传感器完成基础振动响应加速度信号的测量[4]。
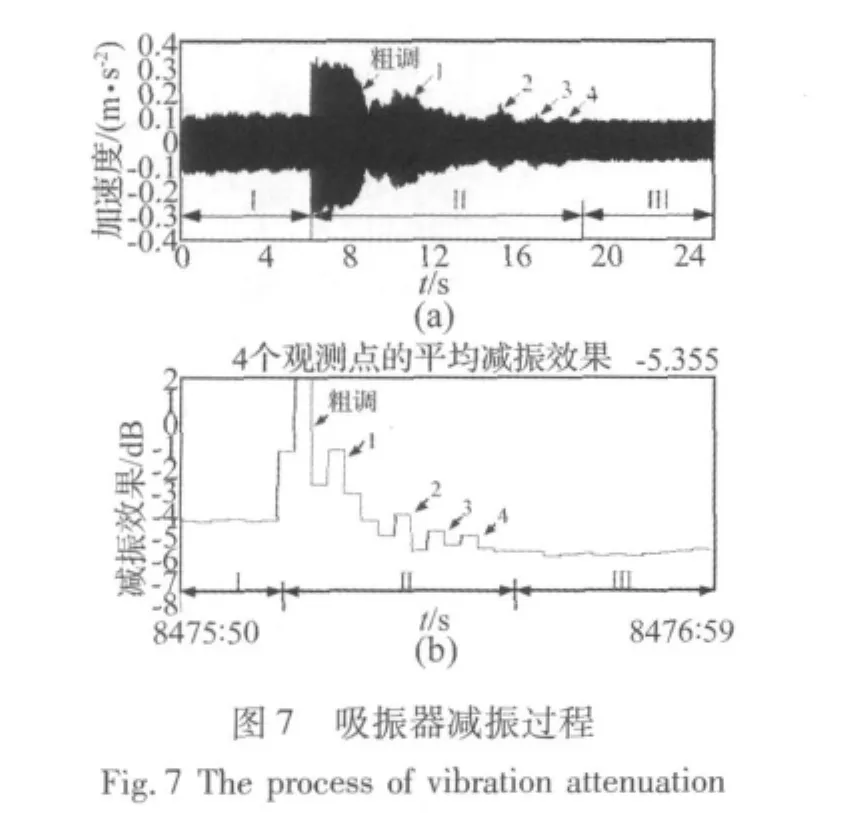
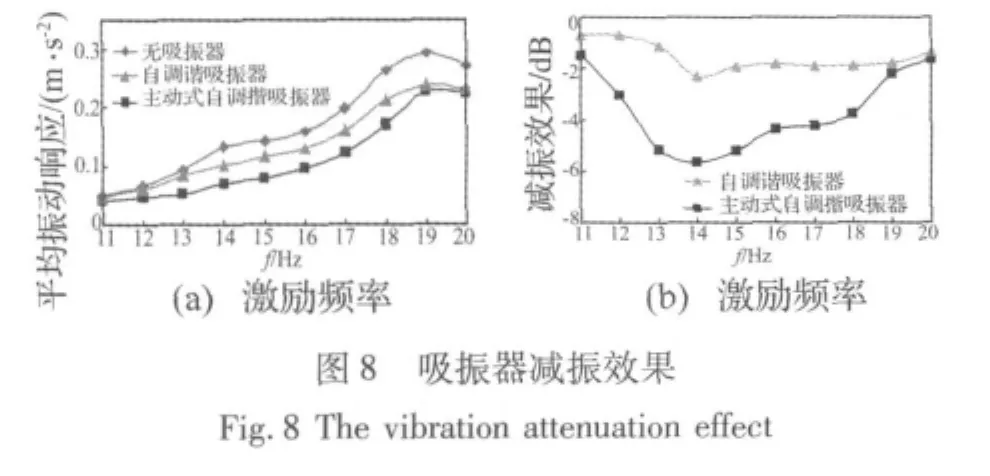
实验中利用式(4)所得的总体减振效果来评价吸振器的性能。为了体现磁流变弹性体的自调谐功能和主动力减小阻尼的作用,在系统中安装吸振器后,分别进行自调谐式和主动式自调谐两种状态的减振实验。主动式自调谐吸振器的减振过程如图7所示。图7(a)为测点1时域加速度值的变化,图7(b)为LabVIEW监控界面显示的总体减振效果的变化。图7中第Ⅰ阶段为16 Hz激励时的最优状态;第Ⅱ阶段为13 Hz激励时的自寻优控制过程,共12步寻优,其中反向调节4次,耗时小于15 s;第Ⅲ阶段为13 Hz激励时的最优状态。减振效果如图8所示,图8(a)中曲线分别为无吸振器和有吸振器(自调谐、主动式自调谐)不同激励频率情况下基础的平均振动响应;图8(b)中曲线分别为自调谐吸振器和主动式自调谐吸振器不同激励频率时的减振效果。由图8可见,两种状态下的吸振器在11~20 Hz内均能实现一定的减振效果,并且主动式自调谐吸振器的性能优于自调谐吸振器,前者在13~17 Hz内均能实现降低4 dB以上,减振效果良好。
5 结论
为一种基于磁流变弹性体的主动式自调谐吸振器研制了控制系统。
设计了变步长寻优与反馈控制相结合的控制算法,提高了控制的精度和稳定性。在算法研究的基础上,开发了TMS320F2812为核心的控制器,保证了系统实时性,实现了目标代码的嵌入式运行,降低了控制成本。
利用该控制系统,在多模态实验平台上对吸振器进行了减振控制实验,结果表明,控制系统能够独立控制该吸振器进行减振,寻优时间小于15 s,且减振效果良好。
[1]张洪田,李玩幽,刘志刚.电动式主动吸振技术研究[J].振动工程学报,2001,14(1):113-117.
[2]Jalili N,Knowles D W.Structural vibration control using an active resonator absorber:modeling and control implementation[J].Smart Materials and Structures,2004,13(5):998-1005.
[3] Franchek M A,Ryan M W,Bernhard R J.Adaptive passive vibration control[J].Journal of Sound and Vibration,1995,189(5):565-585.
[4]徐振邦,龚兴龙,陈现敏.机械式频率可调动力吸振器及其减振特性[J].振动与冲击,2010,29(2):1-6.
[5]陈 琳,龚兴龙,孔庆合.天然橡胶基磁流变弹性体的研制与表征[J].实验力学,2007,22(3-4):372-378.
[6]Deng H X,Gong X L.Adaptive tuned vibration absorber based on magnetorheologicalelastomer[J]. Journalof Intelligent Material Systems and Structures,2007,18(12):1205-1210.
[7]王莲花,龚兴龙,邓华夏,等.磁流变弹性体自调谐式吸振器及其优化控制[J].实验力学,2007,22(3-4):429-434.
[8]Holdhusen M H,Cunefare K A.A state-switched absorber used for vibration control of continuous systems[J].ASME Journal of Vibration and Acoustics,2007,129(5):577-589.
[9] Liu J,Liu K.A tunable electromagnetic vibration absorber:characterization and application[J].Journal of Sound and Vibration,2006,295(3-5):708-724.
[10] Sun H L,Zhang P Q,Gong X L,et al.A novel kind of active resonator absorber and the simulation on its control effort[J].Journal of Sound and Vibration,2007,300(1-2):117-125.
[11] Kidner M R F,Brennan M J.Real-time control of both stiffness and damping in an active vibration neutralizer[J].Smart Materials and Structures,2001,10(4):758-769.
[12] Xu Z B,Gong X L,Liao G J.et al.An Active-dampingcompensated magnetorheologicalelastomeradaptive tuned vibration absorber[J].Journal of Intelligent Material Systems and Structures,2010,21(10):1039-1047.
[13] TexasInstruments.TMS320F2810,TMS320F2812 digital signal processors[OL].pdf,2003.
[14] Analog Devices.AD7656_7657_7658[OL].pdf,2006.
[15] Analog Devices.AD5754R[OL].pdf,2008.
[16]倪振华.振动力学[M].西安:西安交通大学出版社,1989.
[17]朱石坚,何 琳.船舶机械振动控制[M].北京:国防工业出版社,2006.
