PPP技术在水深测量成果质量检验中的可行性研究
2012-02-08李冲张胜书李见阳
李冲,张胜书,李见阳
(四川省测绘产品质量监督检验站,四川成都 610041)
1 引言
水深测量是海洋测量、内陆湖泊及河道测量中一项常规的测量项目,影响水深测量成果质量的关键因素是精密定位技术及测深精度。随着工程建设、科学考察对水深测量成果精度和准确度要求的不断提高,传统的测量方法如罗盘和六分仪定位,测深绳、测深杆、测深铅鱼等已远远不能满足测量精度要求。现阶段主要使用GPS-RTK、DGPS技术结合回声测深仪或激光测深仪测定水深。然而使用GPS-RTK、DGPS技术进行精确定位时,必须沿河(海)岸布设足够多的基准站,且其作业距离受到限制,对于水深测量成果的质量检验而言,采用此方法采集样本点势必费时费力。PPP(精密单点定位)技术可以在全球框架内实现绝对定位,且其具有成本低、作业效率高、操作简便等优点,目前其精度已经可以达到厘米级,完全能够满足水深测量成果的质量检验需要。
2 利用PPP技术进行水深测量的基本原理及步骤
PPP技术的基本原理是利用IGS提供的精密轨道产品和钟产品,采用单台接收机的非差观测值按照严格的单点定位的数学模型,进行精密单点定位以获取测量点位的三维空间坐标。水深测量的关键技术是获取动态测量瞬间的测量点位坐标及测量的水深数据。由此可见,利用PPP技术获取的点位三维坐标,经过投影和转换,配合测深仪,可以满足水深测量的需要。
PPP技术应用于水深测量时,其设备主要应由承载测船、动态GPS接收机、精密计时器、回声测深仪、计算机及专用软件等组成。其基本原理如图1。
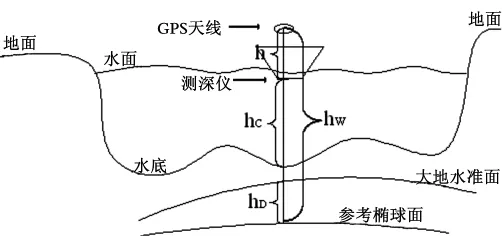
图1 PPP水深测量原理图
基本作业方法及步骤如下:
(1)测前准备
将GPS接收机与测深仪联接在一起,并精确测定GPS天线相位中心至测深仪距离h,h的测量精度控制在3 mm。
(2)外业数据采集
测量水深前打开GPS接收机,并根据接收机的类型将其采样间隔设置在 1 s或 0.1 s,开始测量前应将GPS接收机处于静止状态观测半小时以上。测量时控制好船速。根据测深点的密度要求,利用测深仪进行测量,并记录测量瞬时的时刻ti。
(3)内业数据处理
①利用水深仪自带的数据处理软件对水深测量数据进行处理,得到精确的测深成果hCi;
②利用PPP专用的数据处理软件计算各个采样历元的定位坐标序列,根据水深测量的记录时刻ti,采用高精度的内插模型计算ti时刻的船位坐标,并转换为基于WGS-84椭球的高斯平面坐标和大地高的形式(XWi,YWi,HWi);
③利用坐标转换参数将(XWi,YWi)转换为工程用的独立坐标(Xi,Yi),利用大地水准面模型或高程异常拟合模型将HWi转换为正常高Hi;
④根据上述成果可以计算水下地形特征点的高程
HS=Hi-h-hCi;
⑤根据坐标和水下地形特征点高程序列(Xi,Yi),便可生成所需要的测量成果,如水深图或统计分析图等。
3 利用PPP技术进行水深测量的精度分析及作业要求
利用PPP技术进行水深测量时,其精度关键是定位精度、时间记录精度和大地高精度。
设测量时测船的速度为V,回声测深仪的测量记录时刻误差为△t,PPP的测量误差(不考虑内插误差和转换参数误差)为△P(△XP,△YP,△HP),测船行驶方向与坐标横轴的夹角为β,所使用的大地水准面模型误差为△HD,则测量的定位误差及测深误差为:
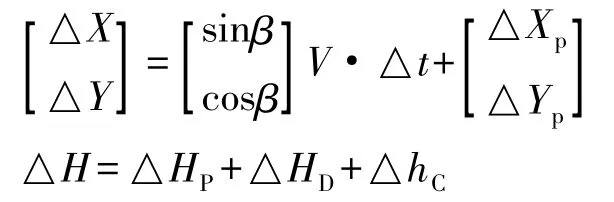
精密单点定位的误差△P可分为与卫星有关的误差(如卫星钟差、卫星轨道误差、天线相位中心偏差、相对论效应等)、与信号传播有关的误差(如电离层延迟、对流层延迟、多路径效应等)以及与地面接收机有关的误差(接收机钟差、接收机天线相位偏差、固体潮改正、海潮改正等)三种,为了使其动态定位精度达到厘米级水平,必须做到以下要求:
(1)采用厘米级精度水平的卫星精密星历;
(2)卫星钟差改正精度需达到亚纳秒量级;
(3)精密单点定位解算时需考虑电离层延迟、对流层延迟、固体潮、海潮、天线相位中心偏差等的精确改正模型;
(4)利用抑制天线、相控阵列天线等技术减小多路径效应的影响。
对于水深测量成果,《水运工程测量规范》(JTJ 203-2001)中要求,测深定位点点位中误差在 1∶500比例尺测图时其限值为 1 m,比例尺越小,精度要求越低,一般测船的速度控制在 3 m/s~5 m/s,则测量记录时刻的精度应达到 0.1 s。
对于测深误差而言,《水运工程测量规范》(JTJ 203-2001)中要求,当水深H<20 m时,深度误差限值为±0.2 m,H>20 m时,深度误差限值为 ±0.01H,采用PPP技术进行水深测量时,△hC可以忽略不计,大地水准面的精度△HD应达到厘米级,△HP的精度一般是位置精度的2倍,因此其可靠性问题是备受关注的问题。在作业之前可以在浅水区,利用测深杆或测深锤获取一定数量的较高精度的水深数据与使用PPP测量的水深进行比较,使用修正的方法来提高测深点的测深精度。具体做法如下:
设测得的修正点为m个,利用PPP技术测定的水深为HPi,i=1……m,利用测深杆或测深锤测定的水深为HGi,以此m个点的△Hi和平面坐标(差)作为起算数据,构建数学模型进行拟合,其数学模型可表示为:F=AX+△,A为由平面坐标(差)所构建的系数矩阵,F为高程修正值,根据最小二乘原理求解待定参数X,从而求解出待修正点的△H,并利用△H对PPP测得的测深数据进行修正。由于△H中的主要误差为PPP在高程方向的解算误差,其在一定区域范围内具有系统性和规律性,当测量区域较大时,应注意修正点的分布应基本能覆盖测量区域。
为了确保测量精度和可靠性,还应利用采集的数据绘制高程曲线。根据曲线的平滑程度来分析PPP高程有没有产生个别或部分点出现异常的情况,然后利用相邻的测深点数据对其进行平滑和修正。
4 利用PPP技术进行水深测量成果质量检验的优点
水深测量成果的一般形式为水深图,其主要由一定间隔的水下高程注记点和等深线构成,在对其成果进行质量评价时,测深精度是最重要的评价指标。一般采用实地采集一定数量的测深点与其成果进行比较统计的方式评价其精度。然而,水深测量成果往往是沿内河或海岸测制,成带状,其成果精度不均匀,为确保检验结论的可靠性,样本点一般需要基本覆盖成果范围。采用常规的水下地形测量方法进行检测时,其结果受潮汐观测误差、定位误差、测深延迟、波浪效应等多种因素的影响,精度较低。采用GPS-RTK无验潮测量技术虽然能消除以上大部分误差的影响,但是其测量范围受到与基准站距离的限制,当样本点分布范围较大时,往往需要布设多个基准站,成本较大,而且效率低下。
利用PPP技术进行水深测量成果精度检测时,只需在开测前进行静态观测半小时左右,之后便可以去任何测量区域进行检测数据的采集,数据采集时只需记录回声测深仪的数据和采集瞬时时刻便可,其检测方式灵活、外业操作简便,利用该技术进行水深测量成果的精度检测,可以极大缩短外业工期,提高检验效率。
5 结语
随着PPP技术的不断发展,其动态定位精度已可以达到厘米级,而且凭借其灵活高效的作业模式,应用范围越来越广,本文探讨了其在水深测量成果质量检测中的应用可行性,给出了具体的原理和数学模型,并从多个方面分析了误差来源,给出了相应的作业要求,然而,应用该项技术的关键是精密的时间同步技术,因此,开发高精度的GPS-数字测深仪一体化系统,配置高精度的计时器,将在水深测量领域中有广泛的应用前景。
[1] 郭文伟,李金亮.水运工程测量手册[M].北京:人民交通出版社,2001.
[2] 张勤,李家权.GPS测量原理及应用[M].北京:科学出版社,2005.
[3]叶世榕.GPS非差相位精密单点定位理论与实现[D].武汉:武汉大学,2002.
[4]黄谟涛,翟国君,王瑞等.海洋测量异常数据的检测[J].测绘学报,1999(3):269~277.
[5]翟国君,黄谟涛,欧阳永忠等.海洋测绘的现状与发展[J].测绘通报.2001(6):7~9.
[6]陈洪云,翟国君.海洋测绘进展评述[J].海洋测绘,2004,24(1):63 ~65.
[7]冯守诊,胡光海.水深测量误差成因分析[J].海岸工程.2004,23(2):45 ~50.
[8]徐卫明,张立华,孙刃.水深测量数据处理中的粗差探测技术[J].东北测绘.2002,25(2):16~17.
