全功率驱动的异步风电机组的控制策略研究
2012-02-08王瑞新
王瑞新,王 毅,孙 品
(华北电力大学 电气与电子工程学院,河北 保定 071003)
全功率驱动的异步风电机组的控制策略研究
王瑞新,王 毅,孙 品
(华北电力大学 电气与电子工程学院,河北 保定 071003)
通过全功率PW M变流器并网的笼型异步风力发电机组 (the Full Rated Converter Induction Generator,FRC-IG),以其低成本、高可靠性和易维护的特点引起了人们的关注。在分析笼型异步风电机组数学模型的基础上,对全功率PW M变流器的控制策略进行了研究,给出了基于转矩给定的最大功率跟踪控制策略,通过对电磁转矩的调节间接控制发电机转速来跟随最大功率曲线。网侧变流器采用并网电压控制策略,根据并网电压的幅值来调节无功功率抑制电网电压的波动,在保证风电机组安全运行的同时降低了机组并网对电网的影响。仿真结果表明所采用的控制策略能很好地实现风电机组的最大风能跟踪,降低并网点电压波动。在电网电压故障期间,并网电压控制策略还可以有效地提高机组的低电压穿越能力,保障风电机组稳定运行。
笼型异步发电机;最大功率跟踪;风力发电;全功率变流器
0 引言
近年来风力发电得到了迅速发展,并且开始在电力供应中发挥重要作用。变速恒频风力发电机组可以在不同的风速下调节风力机转速,从而捕获到最大风能,相对于定速风力发电机组在效率和可控性上具有很大优势[1]。目前变速恒频风力发电的主流机型是永磁直驱风力发电机组和双馈风力发电机组[2,3]。永磁直驱风力发电机组由永磁同步电机通过全功率变流器实现并网发电,由于风力机直接驱动发电机,省去了增速齿轮箱,提高了机组的可靠性,并且运行维护量较小。但随着机组容量的不断增大以及永磁材料涨价,体积大和成本高的问题日益突出。双馈风电机组采用的是绕线式异步电机作为发电机,定子侧直接并网,转子侧变流器只传递转差功率,相对于永磁发电机组有很大的成本优势。但双馈发电机转子侧存在滑环,使得维护成本大大增加,而且发电机直接与电网相连,故障穿越能力也不如通过全功率变流器并网的永磁直驱风电机组。基于上述两种机型的优缺点,又提出了一种以笼型异步电机代替永磁电机的变速恒频发电机型[4~6],将笼型异步发电机通过全功率变流器连接到电网实现并网发电。该机型在成本和可靠性上优于永磁风电机组,在并网控制能力和维护方面优于双馈机组,但需采用高速比齿轮箱和全功率变流器。
目前采用该机型的西门子SWT-3.6-107风电机组[7]已获得实际应用,但对此种机型控制策略研究的文献却相对较少。文献 [8]提出了一种异步机通过全功率变流器并网的控制策略,定子侧变流器采用不需要磁链传感器的间接矢量控制,降低了系统传感器的成本。文献 [9]对FRC-IG机组在电网电压跌落时,通过电机电磁转矩的调节使风电机组安全穿越电网故障。文献 [10]将模糊控制应用到FRC-IG风电机组的控制系统中,减小参数误差对系统的影响。
变速恒频风电机组可以在风速变化的情况下,通过对风力机桨叶和转速的调节,使风力机捕获最大风能,运行在最大功率点上。变速恒频风电机组的最大功率跟踪控制方式[11]多种多样,对于风电场数据不明且转动惯量小的小型风力发电系统,最大功率跟踪可以采用寻优法[12,13]来实现。本文研究对象为兆瓦级风力发电系统,转动惯量较大,寻优法很难实现最大功率跟踪。在以风电场数据为依赖的控制策略中,可以通过给定的特性曲线[14~16]控制发电机来实现最大风能的捕获。最优转速曲线就是其中的代表,然而最优转速的确定不仅需要参考风力机数据,而且还需测量风速,风速测量误差会使转速偏离实际最优值。本文采用转矩给定的最大功率跟踪,结合异步机的矢量控制策略,可以很好的实现风电机组对最大功率的捕获,避免了对风速的测量,同时降低风电场的数据误差带来的影响,提高最大功率跟踪的准确性。
本文主要研究基于全功率驱动的异步风电机组的控制策略,实现风电机组的最大功率跟踪以及安全并网。首先对风力机和异步机的数学模型和最大功率跟踪原理进行了分析,给出了一种最优转矩给定的最大功率跟踪策略,通过机侧变流器对异步发电机进行矢量控制跟踪最大风能。网侧变流器采用并网电压控制,实现风电机组安全并网的同时抑制电网电压的波动。最后,在 Matlab仿真平台上搭建了基于笼型异步机的风力发电系统模型,对异步风电机组控制策略的可行性以及最大功率跟踪策略的正确性进行了验证,并对在电网电压跌落下风电机组的响应做了仿真分析。
1 风电机组结构与数学模型
FRC-IG风电机组拓扑结构如图1所示。采用笼型异步机作为发电机,风力机通过增速齿轮箱拖动发电机,发电机定子侧通过背靠背全功率PW M变流器连接到电网,从而实现风能到电能的转换。
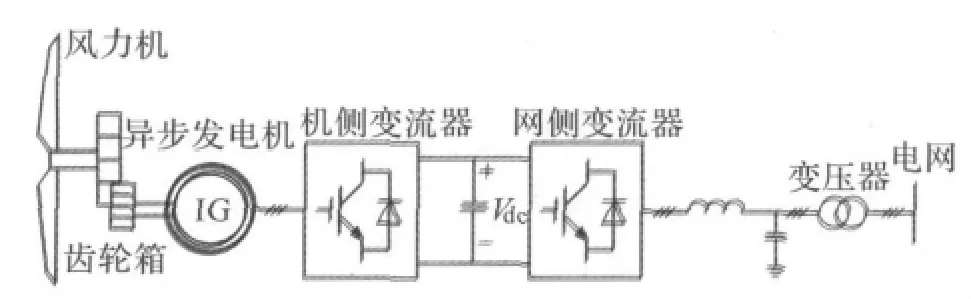
图1 FRC-IG风电机组拓扑结构Fig.1 Topology structure of FRC-IG wind turbine
在异步风电机组中,风力机将捕获的风能转换为机械功率,通过齿轮箱输送给异步发电机,发电机起着机械功率与电功率转换的作用,机侧变流器将发电机产生的有功功率输送到直流母线环节,并向异步机提供励磁所需的无功功率。网侧变流器稳定直流母线环节电压,将有功功率输送到电网。
1.1 风力机运行特性
风力机是风力发电系统中将风能转化为机械能的重要部分,由风力机的空气动力学可知,风力机输出的机械功率可表示为:

式中:ρ为空气密度;Sw为风力机叶片迎风扫掠面积;v为风速;Cp是风能利用系数,与桨距角β和叶尖速比λ有关。叶尖速比λ是叶尖线速度与风速之比:

式中:Rw为风力机叶片半径;ωw为风力机叶片转速;当桨距角不变、风速给定的情况下,则存在一个最优叶尖速比λopt,对应于一个最优转速ωopt,使得风力机捕获到最大风能。将不同风速下的最优转速对应的最大功率点连接起来即可得到最大功率追踪曲线。
1.2 异步发电机数学模型
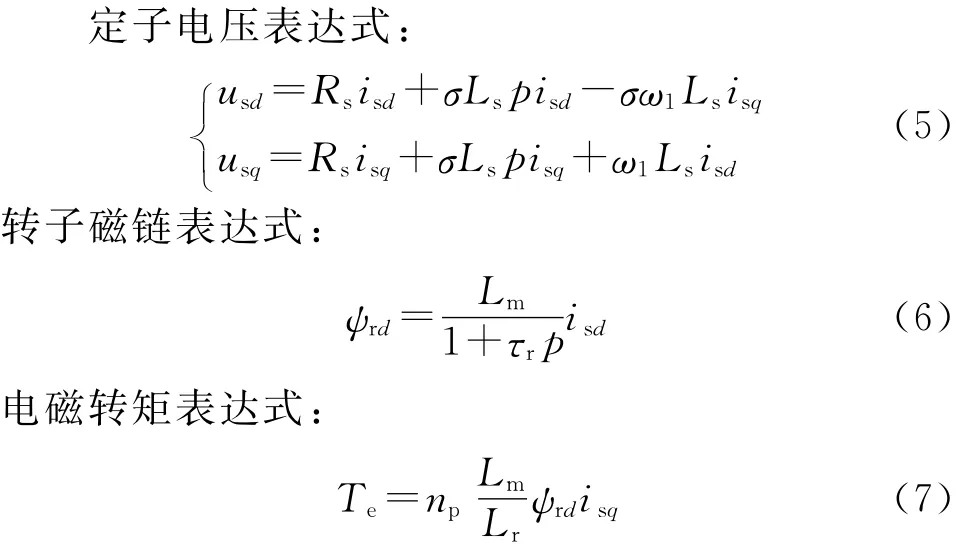
异步发电机是风力发电系统中将风力机输出的机械功率转换为电功率的重要环节,而电机本质上又是一个高阶、非线性、强耦合的多变量系统,如何实现对电机的高性能控制,是风力发电系统实现最大功率跟踪的关键所在。根据笼型异步电机的特点,采用适合笼型异步电机的转子磁链定向的矢量控制策略,通过笼型异步电机在三相静止坐标系下的数学模型到两相同步旋转坐标系下的变换,实现对电机磁链和转矩的完全解耦控制。笼型异步电机在两相同步旋转坐标系下的电压方程可表示为:定、转子磁链方程:
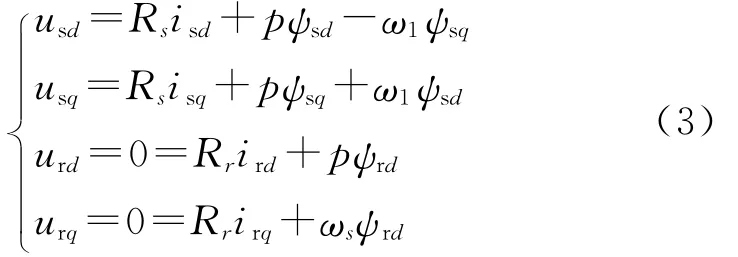
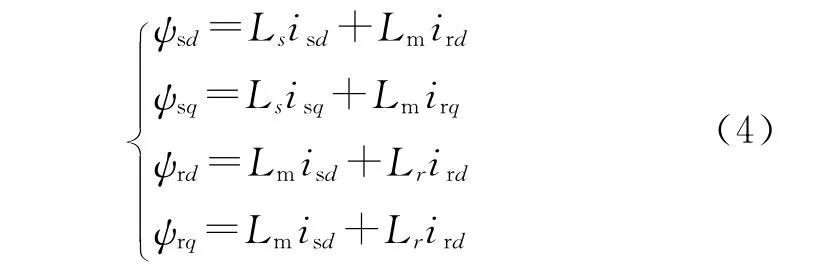
式中:ω1为两相旋转坐标系旋转电角速度;ωs为ω1与转子电角速度ωr之差;Ls为定子电感;Lr为转子电感;Lm为励磁电感;p为积分算子;isd,isq为定子电流在同步旋转坐标系下的dq轴分量。通过对转子磁链矢量ψr的幅值和角度的计算,将同步旋转坐标d轴定向在转子磁链矢量方向上,即ψr=ψrd,ψrq=0,简化电机定、转子磁链表达式,通过整理可得到在转子磁链定向坐标系下电机数学模型。
2 全功率变流器控制策略
2.1 最大功率跟踪控制策略
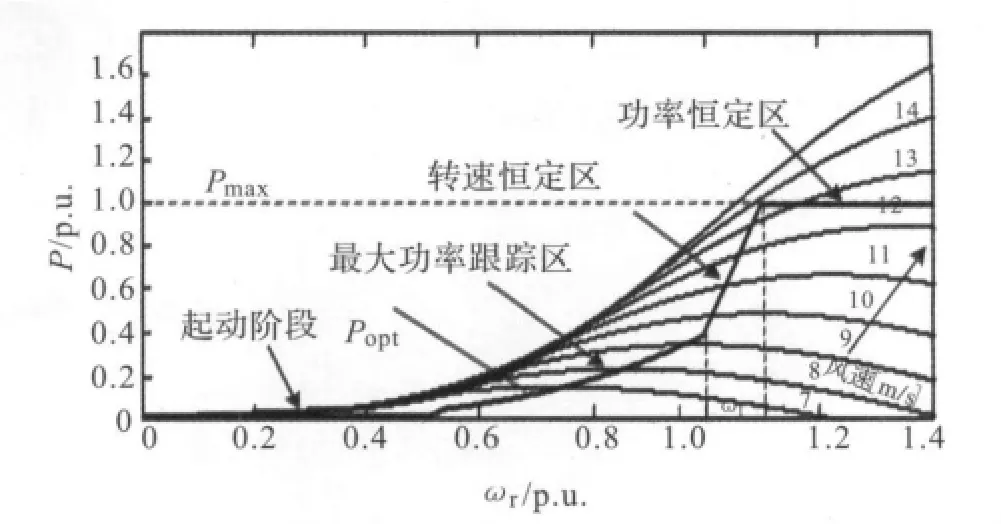
图2 最大功率跟踪曲线Fig.2 Maximum power tracking curve
对于特定的风力机,其最大功率曲线是确定的。由于风机是通过一个固定变比的增速齿轮箱与发电机转子相连,在标幺值系统中,风机转速与发电机转速具有等效性。在不同的风速下,为了保证风力发电机组能够安全稳定运行,最大功率跟踪曲线可按照图2所示分为启动阶段、最大功率跟踪区、转速恒定区和功率恒定区。最大功率跟踪区是当风力发电机组并入电网并运行在额定转速ω1下时,为了最大限度的捕获风能,发电机转速随风速的变化而相应调节,确保风能利用系数Cp保持在最大值。当发电机组转速随着风速的增大达到额定转速ω1时,发电机组将运行在转速恒定区,不再进行最大功率跟踪,限制转速的增加以保护机组不受损坏。风速的进一步增大,发电机组的输出功率将稳定在功率限幅值,运行在功率恒定区。最大功率参考值P*opt可以由发电机转速通过式 (8)给出:
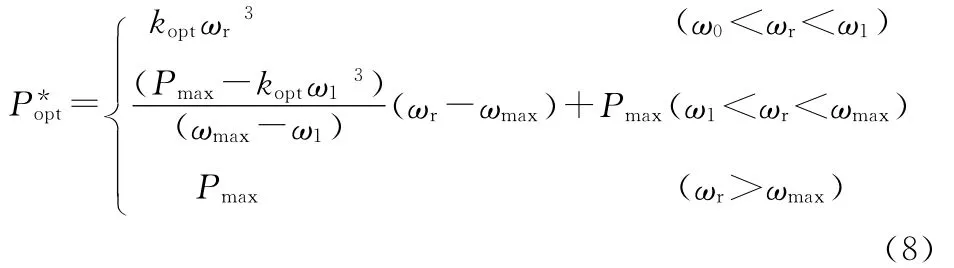
式中:kopt为最大功率跟踪曲线的比例系数;ω0为风电机组的切入转速对应的电角速度;ω1为进入转速恒定区时的电角速度;ωmax为转速限幅值对应的电角速度;Pmax为输出功率限幅值。
2.2 机侧变流器控制策略
与异步发电机定子侧相连的变流器称之为机侧变流器,不仅需要向异步发电机提供建立磁场所需的无功功率,还要控制发电机跟踪最大功率曲线,并将发电机产生的有功功率输送到直流母线上。通过上述对异步电机在转子磁链定向下的两相旋转坐标系数学模型分析,对异步发电机采用转子磁链定向的矢量控制策略,定子d轴电压控制异步电机的转子磁链,定子q轴电压控制异步电机的电磁转矩,实现励磁和转矩的解耦控制,控制电机实现最大功率跟踪。机侧变流器控制框图如图3所示。
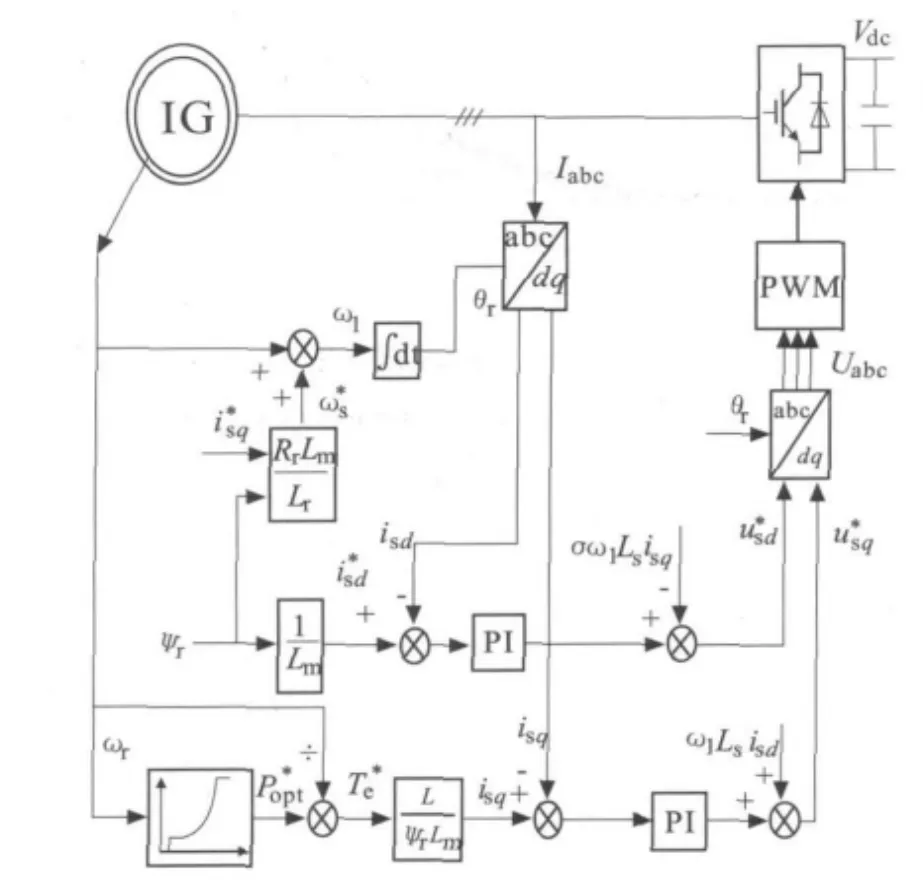
图3 机侧变流器控制框图Fig.3 Control diagram of generator side converter
2.3 网侧变流器控制策略
发电机产生的有功功率,经机侧变流器输送到直流母线,引起直流母线电压上升,而网侧变流器起着稳定直流母线电压的作用,将直流母线上的有功功率输送到电网,并通过网侧无功功率的调节来控制并网点电压的波动。网侧变流器在同步旋转坐标系下的数学模型可表示为:
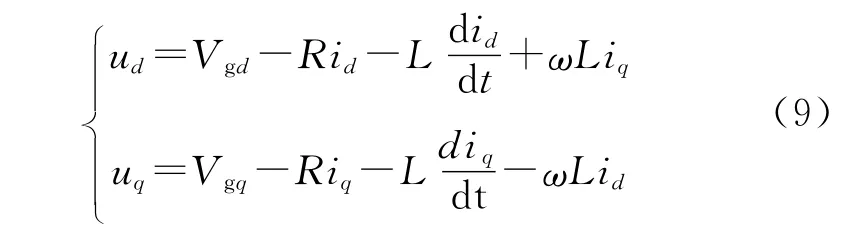
式中:Vgd,Vgq为并网点电压矢量在同步旋转坐标系下的dq轴分量;id,iq为电网电流矢量在同步旋转坐标系下的dq轴分量,ωg为并网点电压电角速度。在坐标变换时,将同步旋转坐标的d轴与并网点电压矢量Vg重合,既Vgq=0。网侧变流器有功功率和无功功率表达式为:

由式 (9)和 (10)可知,对有功电流分量id和无功电流分量iq进行解耦控制,即可独立调节网侧变流器输出的有功功率和无功功率,稳定直流母线电压和并网点电压。网侧变流器控制框图如图4所示。
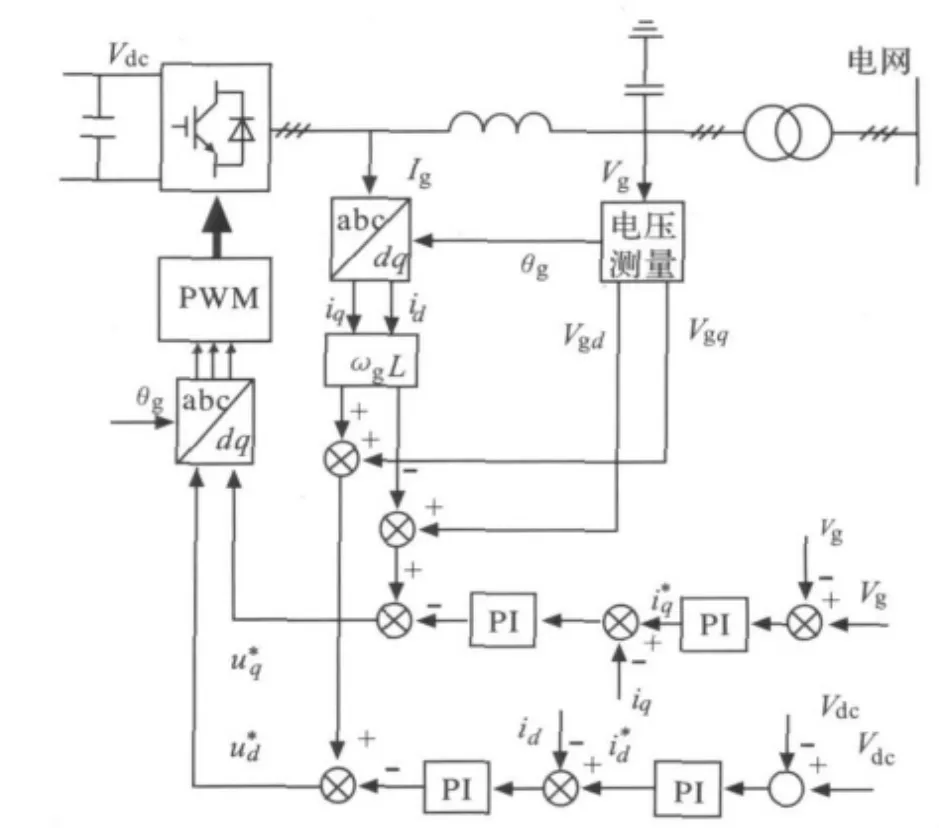
图4 网侧变流器控制框图Fig.4 Control diagram of grid side converter
有功电流分量给定值i*d由直流母线电压外环控制器得到,无功电流分量给定值i*q由并网点电压外环控制器得到,并网点电压和直流母线电压的给定值都为额定值,经过对有功电流分量和无功电流分量的闭环控制,得到输出控制量u*d,u*q,再经过派克逆变换和脉宽调制环节,得到网侧变流器的控制脉冲,实现风电机组的并网控制。
3 仿真结果及分析
在 Matlab仿真平台按图1搭建了笼型异步机风力发电系统模型,参数设置如下:电机额定线电压有效值U=0.69 k V,额定功率P=2 MW,定子电感Ls=3.442 p.u.,转子电感Lr=3.361 p.u.,励磁电感Lm=3.232 p.u.,直流侧电容C=50 mF。
图5所示为随机风速曲线,图6,7所示为在随机风速给定的情况下,风电机组发电机转速和并网有功功率的响应曲线。根据图2所示的最大功率跟踪曲线,在10~30 s附近,发电机转速跟随风速的变化而变化,保持风能利用系数维持在最大值,风电机组运行在最大功率跟踪区。在30~38 s,风速在13 m/s附近波动,发电机转速达到最大值,有功功率输出达到额定值,运行在功率恒定区。随后风速缓慢减少,并网有功功率也随之减少,而发电机转速维持在额定转速附近,风电机组运行在转速恒定区。
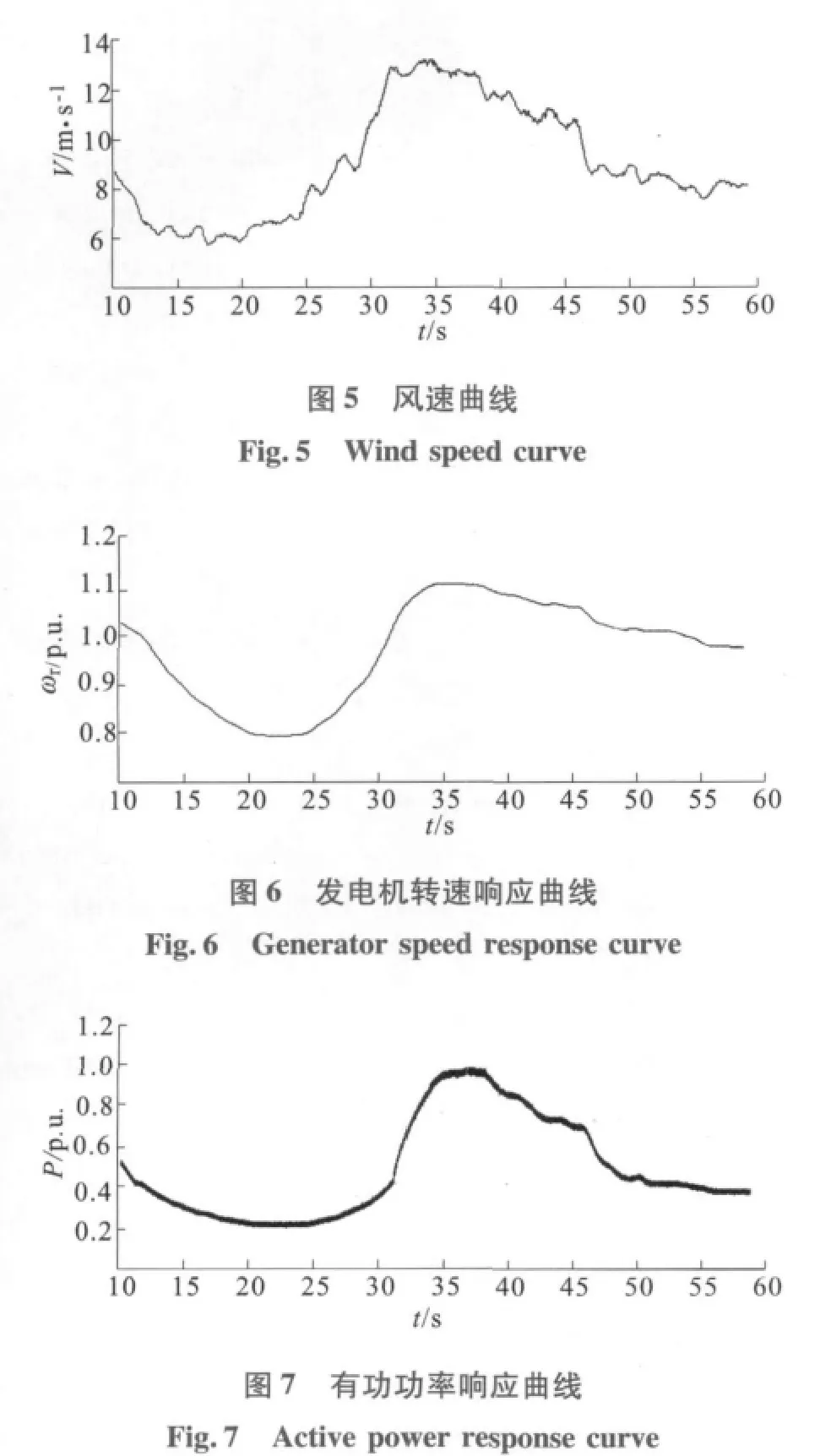
图8,9所示为风电机组在风速波动的情况下,网侧变流器采用单位功率因数控制和并网电压控制下的电网电压波动曲线。在网侧变流器进行并网电压控制时,电网电压可以很好地维持在额定电压附近,抑制电网电压的波动,减少风电机组并网对电网电压的影响。图10所示为网侧变流器在并网电压控制下无功功率的响应曲线。
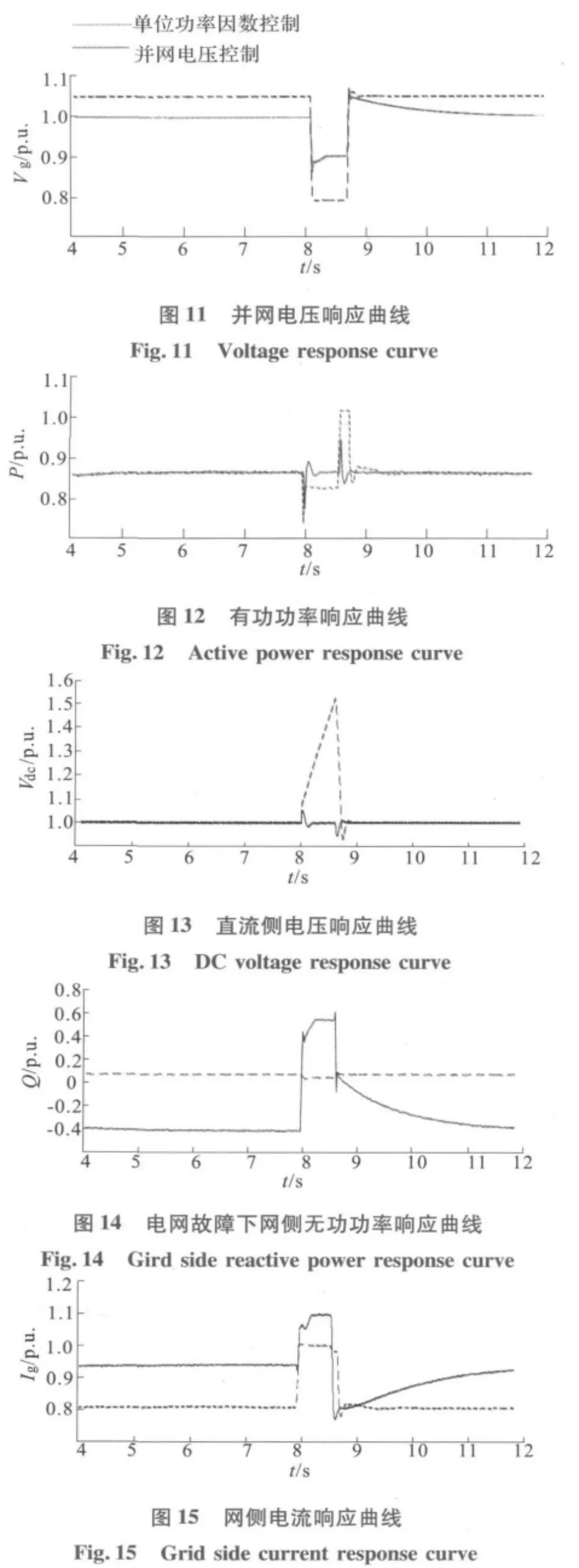
图11~15给出了风力发电机组在电网电压跌落故障下,网侧变流器采用单位功率因数控制和并网电压控制策略下的响应曲线。在8 s时刻,电网电压跌落到0.8 p.u.,持续0.625 s。网侧变流器采用并网电压控制并网,在电网电压跌落时通过对无功功率的调节,在一定程度上提升低电压穿越能力,降低直流侧电容在电网故障下的电压跃升,减少电网故障对风电机组的影响。
4 结论
本文在分析全功率驱动的笼型异步风电机组数学模型的基础上,对风电机组最大功率跟踪和并网的控制策略做了仿真研究。将电动机调速使用的矢量控制技术应用在风力发电机上,使发电机获得转矩和励磁的解耦控制能力,通过对电磁转矩的调节实现风电机组最大功率跟踪,控制简单、跟踪性能好。网侧变流器在并网电压控制策略下,将不同风速下发电机产生的有功功率输送到电网,维持直流侧电压稳定,还可以独立调节无功功率,根据并网点电压的大小对电网进行无功补偿,抑制电压波动提高风电场的低电压穿越能力,为风电机组的不脱网运行提供保障。
[1]Rajib Datta,V.T.Ranganathan.Variable-speed wind power generation using doubly fed wound rotor induction machine—A comparison with alternative schemes [J].IEEE Transactions On Energy Conversion,2002,17(3):414-421.
[2]李晶,王伟胜,宋家骅.变速恒频风力发电机组建模与仿真 [J].电网技术,2003,27 (9):14-17.
Li Jing,Wang Weisheng,Song Jiahua. Modeling and dynamic simulation of variable speed wind turbine [J].Power System Technology,2003,27 (9):14-17.
[3]尹明,李庚银,张建成,等.直驱式永磁同步风力发电机组建模及其控制策略 [J].电网技术,2007,31(15):61-65.Yin Ming,Li Gengyin,Zhang Jiancheng,et al. Modeling and control strategies of directly wind turbine with permanent magnet synchronous generator [J].Power System Technology,2007,31 (15):61-65.
[4] M.Karrari,W.Rosehart,O.P. Malik.Comprehensive control strategy for a variable speed cage machine wind generation unit [J].IEEE Transations on Energy Conversion,2005,20 (2):415-423.
[5]Vladislav Akhmatov.Full-load converter connected asynchronous generators for MWclass wind turbines[J].Wind Engineering,2005,29 (4):341-351.
[6]Haejoon An,Heesang Ko,Hongwoo Kim,et al. Modeling and voltage-control of variable-speed SCAG-based wind farm [J].Renewable Energy,2012,Vol 42:28-35.
[7]SIE MENS,Wind Turbine 2009;SWT-3.6-107.Available from:http://http://www.energy.siemens.com/br/pool/hq/power-generation/wind-power/E50001-W310-A103-V5-4A00_WS_SWT-3.6-107_US.pdf.
[8]Jose Luis Domingues Garcia,Oriol Gomis Bellmunt.Indirect vector control of a squirrel cage induction generator wind turbine [J].Computer and Mathematics with Application,2012,64 (2):102-114.
[9] Marta Molinas,Bjarne Naess,William Gullvik,et al.Cage induction generators for wind turbines with power electronics converters in the light of the new grid codes[C].European Conference on Power Eletronics and Applications,2005,1-10.
[10] MG Simoes,B K Bose,R J Spiegel.Fuzzy logic based intelligent control of a variable speed cage machine wind generation system [J].IEEE Transactionson Power Electronics,1997,12 (1):87-95.
[11]陈毅东,杨育林,王立乔,等.风力发电最大功率点跟踪技术及仿真分析 [J].高电压技术,2010,36(5):1322-1326.
Chen Yidong,Yang Yulin,Wang liqiao,et al. Maximum power point tracking technology and simulation analysis for wind power generation [J].High Voltage Engineering,2010,36 (5):1322-1326.
[12]陈思卓,郭鹏,范晓旭.双馈式风力发电系统最大风能跟踪控制的研究 [J].电力科学与工程,2010,26(1):1-4.
[13]王丰收,沈传文,孟永庆.基于 MPPT算法的风力永磁发电系统的仿真研究 [J].电气传动,2007,37 (1):6-10.Wang Fengshou,Shen Chuanwen, Meng Yongqing.Simulating study of wind power system using the P MSG based on the MPPT method [J].Electric Drive,2007,37 (1):6-10.
[14]姚骏,廖勇,瞿兴鸿,等.直驱永磁同步风力发电机的最佳风能跟踪控制 [J].电网技术,2008,32(10):11-15,27.
YaoJun,Liao Yong,Qu Xinghong,et al.Optimal wind-energy tracking control of direct-driven permanent magnet synchronous generators for wind turbines[J].Power System Technology,2008,32 (10):11-15,27.
[15]赵仁德,王永军,张加胜.直驱式永磁同步风力发电系统最大功率追踪控制 [J].中国电机工程学报,2009,29 (27):106-111.
Zhao Rende,Wang Yongjun,Zhang Jiashen. Maximum power point tracking control of the wind energy generation system with direct-driven permanent magnet synchronous generators [J].Proceedings of the CSEE.2009,29 (27):106-111.
[16]刘其辉,贺益康,赵仁德.变速恒频风力发电系统最大风能追踪控制 [J].电力系统自动化,2003,27(20):62-67.
[17]叶杭冶.风力发电机组的控制技术 [ M].北京:机械工业出版社,2006.
[18]李永东.交流电机数字控制系统 [ M].北京:机械工业出版社,2002.
Research on Control Strategy of Induction Generator Wind Turbine Drived by Full Rated Converter
Wang Ruixin,Wang Yi,Sun Pin
(School of Electrical and Electronic Engineering,North China Electric Power University,Baoding 071003,China)
Squirrel-cage induction wind turbines connecting the grid with the full rated PW Mconverter attracted people's attention because of the characteristics of low cost,good reliability and easy to maintain.This paper studied the control strategy of the full rated PW Mconverter based on the analysis of squirrel-cage induction wind turbine mathematical model,presented the strategy of maximum wind energy tracking control by the referenced torque,controlling the generator speed to follow the maximum power curve indirectly through the regulation of the electromagnetic torque.The grid side converter use grid voltage control strategy to suppress the fluctuation of grid voltage by adjusting the reactive power according to the voltage amplitude,reduce the impact to the grid and ensure the safe operation of wind turbine.Simulation results show that the control strategy can be used effectively to achieve the maximum wind power tracking of the wind turbine and reduce the voltage fluctuation.The grid voltage control strategy can improve the capability of low voltage ride through effectively to ensure the stable running of wind turbines as the grid fault.
squirrel-cage induction generator;maximum power tracking;wind power generation;full rated converter
T M614
A
2012-06-05。
国家自然科学基金资助项目 (50977028)。
王瑞新 (1986-),男,硕士研究生,研究方向为笼型异步变速恒频风力发电系统,Email:risan1221@163.com。