复杂交流多电机系统的研究
2012-01-31沈翠凤顾光旭
沈翠凤,顾光旭
(盐城工学院,江苏盐城224051)
0 引 言
随着现代高新科技的发展以及工业自动化程度的提高,多台交流电机同步协调运行显得尤为重要。两台电机同步系统的控制较为简单,这方面的研究已经取得了较好的效果。对于多台变频器驱动的多感应电机系统,其控制变得尤其复杂,需要人们去研究新的控制方法。
自抗扰控制器[1]在电机调速系统等领域得到了广泛的应用。本文建立了多电机按转子磁场定向的物理模型,将自抗扰控制器应用到多电机同步控制中。利用扩张状态观测器统一观测系统的扰动,通过补偿,将控制对象进行确定化以及近似线性化处理,这样较好地达到了转子转速和皮带张力的解耦控制。
1 多电机同步运行的数学模型
图1为多台电机同步运行的物理模型。电机1作为主电机控制系统的转速,电机2、电机3作为从电机跟随主电机1的速度变化,使相邻两电动机之间速度差保持恒定,从而使系统的张力恒定[2-3]。
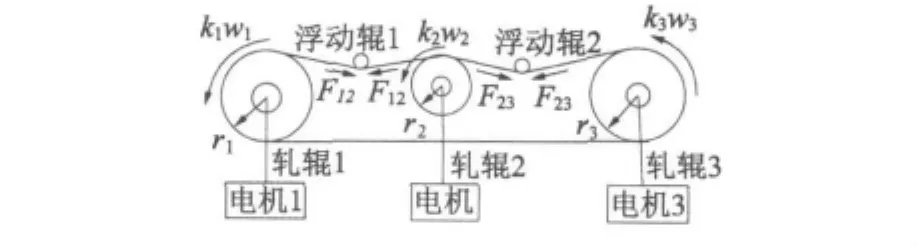
图1 多台电机同步运行的物理模型
基本的动态方程如下:

式中:ωr、p、r、k 分别为皮带轮的电气角速度、电机转子极对数、半径和速比;T为张力变化时间常数;K为传递系数。
2 多电机同步运行的转速模型分析

三电机同步系统中,当变频器运行于矢量控制时,按转子磁链Ψr定向的同步旋转正交M、T坐标系下的简化模型[4]:
式中:ωr为转子角转速;Ψr为转子磁链;ω为电机同步旋转角转速;p为极对数;J为转动惯量;TL为负载转矩;Tr为电机时间常数;Lr为转子电感;Lm为转子和定子互感。
由简化模型可知,电机的磁通子系统仅取决于定子电流,而Ψr不变,则系统的输入可简化为给定的三个频率信号,输出为电机1的速度ωr1、皮带张力F12和F23。这里,只需实现转速张力子系统的解耦,则系统模型可进一步简化[5]:

3 多电机自抗扰控制系统设计
针对三输入三输出的多电机同步系统,本文中提出了一种新的基于自抗扰控制技术的控制方案。其中速度和张力控制器均采用优化的一阶ADRC,控制系统结构如图2所示。
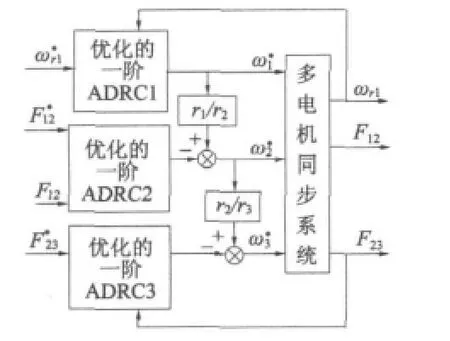
图2 三电机自抗扰控制结构图
3.1 一阶ADRC的设计
自抗扰控制器(图3)是基于跟踪微分器(TD)来安排过渡过程、扩张状态观测器(ESO)估计系统状态、模型和干扰,非线性误差反馈(NLSEF)来给定控制信号的一种非线性控制器[3]。

图3 自抗扰控制器结构
本文设计了一个基于一阶ADRC控制器按转子磁链定向的矢量控制异步电动机调速系统。这里利用ADRC的特性,对J变化引起的一系列影响归于扩张状态z2统一观测补偿,控制器原理框图如图4所示。
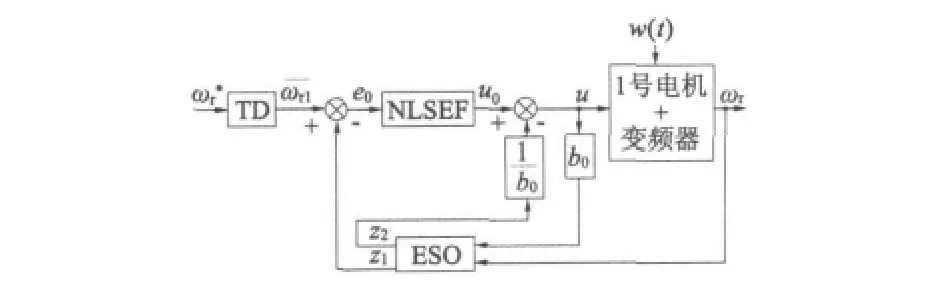
图4 一阶ADRC框图
3.2 ADRC 的简化
采用线性的P调节代替非线性误差反馈,同时省略TD环节,则可得到结构简化的一阶ADRC模型。如果再适当提高反馈增益,则同样可以实现较好的控制性能。本文中采用的ADRC控制原理框图如图5所示。
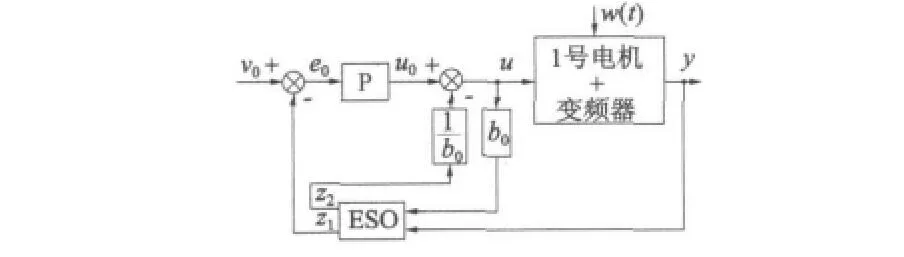
图5 处理后的ADRC控制原理框图
本文采用的ADRC控制器算法:
式中:v0为给定值;y为被控对象输出;u为控制量;z1为y的跟踪信号,z2为w(t)的观测值;h为采样周期;kp为比例系数;b0为补偿因子。试验中系统速度的采样周期 h=0.1 s,取20。实验中通过整定 kp、b0来调整系统的控制性能。
4 多电机同步运行的实验结果
4.1 硬件组成
三电机同步控制系统硬件连接示意图如图6所示,系统采用WinCC作为上位机创建可视化的过程控制画面,采用PLC作为下位机硬件控制器控制三台变频器执行三电机调速,采用OPC技术实时采集系统速度和张力数据。

图6 多电机同步系统结构框图
4.2 试验结果对比研究
4.2.1 抗扰性能研究
变频器设定为矢量控制方式。图7(a)为PID控制下在对系统突减和突加负载系统响应,图7(b)为ADRC控制下在对系统突减和突加负载系统响应对比图。可以看出,ADRC控制下系统的鲁棒性和抗干扰性优于PID控制。

图7 突减/突加负载系统响应曲线
4.2.2 解耦性能研究
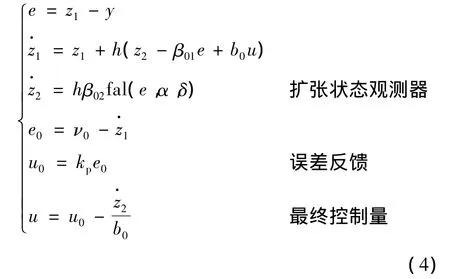
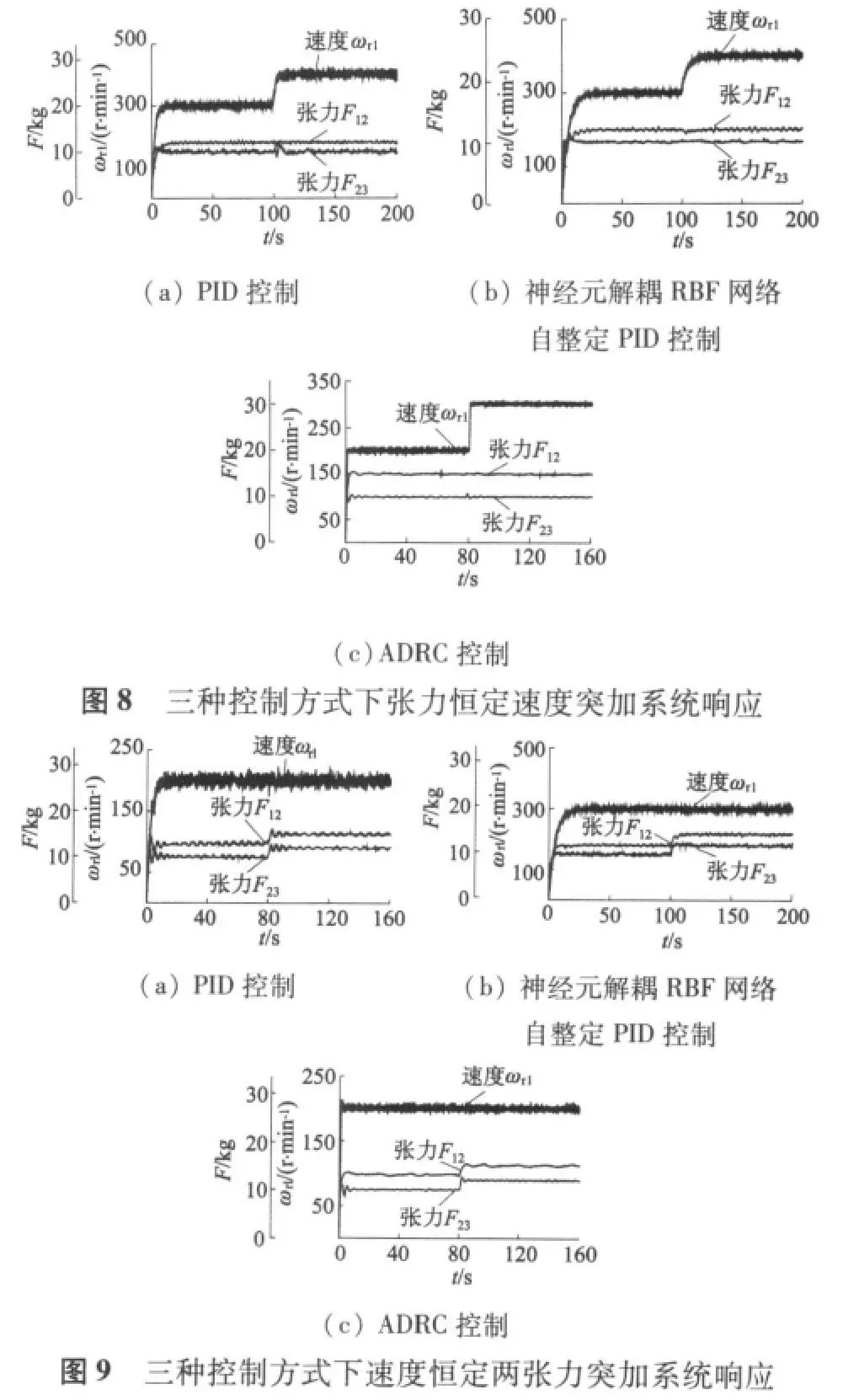
图8和图9分别为PID控制、神经元解耦RBF网络自整定PID控制(笔者将文献[6]的方法推广到三电机系统中)和ADRC控制时的多电机系统速度和张力的实验波形。图8(a)中,由于电机速度给定变化,系统输出张力波形出现较大的尖峰抖动误差;而在图8(b)、图8(c)中,系统输出张力波形仅出现微小的抖动误差,但图8(c)中的系统动态响应速度明显快于图8(b)。图9(a)中,由于两张力同时突加,电机输出速度出现一定的抖动误差;而在图9(b)、图9(c)中,当两张力同时突加,电机输出速度几乎不变,同样的是,图9(c)中的系统动态响应速度明显快于图8(c)。
由此可见,采用自抗扰控制器时,系统速度和张力解耦效果较好,且具有较快的响应速度和较高的稳态精度。
5 结 语
本文提出了一种新的基于一阶自抗干扰的控制技术应用于复杂三交流电动机同步控制系统中,实现了对系统行之有效的控制,同时也为高性能的三交流电动机同步控制提供了一条新的途径。
[1]韩京清.自抗扰控制器及其应用[J].控制与决策,1998,13(1):19-23.
[2]刘星桥,赵亮,陈冲.基于神经网络控制的三电机同步系统[J].江苏大学学报(自然科学版),2009,30(6):596-600.
[3]张今朝,刘国海.多电机同步系统的多模型辨识[J].电机与控制学报,2009,13(1):138-142.
[4]刘国海,康梅,尤德同,等.两电机同步系统的神经网络逆控制[J].江苏大学学报(自然科学版),2006,27(1):67-70.
[5]戴先中,刘国海,张兴华.交流传动神经网络逆控制[M].北京:机械工业出版社,2007.
[6]赵亮,刘星桥,陈冲,等.基于神经元解耦RBF网络多电机系统参数 PID 控制[J].电气传动,2009,39(1):59-62.