基于ZigBee技术的博物馆内人员定位系统的研究*
2012-01-21张庆华施伟斌
张庆华,施伟斌
(上海理工大学 光电信息与计算机工程学院,上海 200093)
引 言
目前国内的博物馆对进入馆内的人员进行定位的方法一般是通过安装摄像头对人员进行监控,这种方法利用现有的科技手段能到达很好的效果。但是,应用成本高,且当馆内人员不在摄像头范围内时,这种方法将会失效。基于这样的考虑,文中设计了一套基于ZigBee技术的博物馆内人员定位系统。
ZigBee技术是一种短距离、低速率、低复杂度、低功耗、低成本的双向无线通信技术[1],它是由Invensys公司、日本三菱电气公司、美国摩托罗位公司以及荷兰飞利浦等公司在2002年10月共同提出[2]。该技术主要适合于自动控制和远程控制领域,可以嵌入到各种设备中,同时支持地理定位功能。ZigBee是一个最多可由65 000个传感器节点组成的一个无线数据传输网络平台[3]。每个传感器节点间能相互通信,自动组网,形成一个覆盖面较广的无线传感器网络。通过对这种技术的定位方面的研究,设计的这套系统能够及时、准确地将进入馆内的人员具体位置通过无线传感器网络传输到博物馆的计算机管理系统。同时,这套系统还具备了低成本、低复杂度、高覆盖率等优点,可以较好地解决了上述所遇到的问题。
1 系统的总体设计框架
这套基于ZigBee技术的博物馆内人员定位系统采用IEEE 802.15.4技术标准、ZigBee网络协议及RSSI定位引擎技术设计。它由大量的无线传感器参考节点、盲节点、汇聚节点、网关和上位机PC组成。网络中的参考节点将自己的参考信息同时传输给附近的盲节点和汇聚节点,盲节点通过内部计算,最终将计算结果的数据也传输给附近的汇聚节点。当汇聚节点接收到参考节点和盲节点所输送的信息后,再将信息传输给下一个汇聚节点直到最终把数据输送到网关,通过网关的协议转换,将信息传到博物馆的计算机中心。博物馆内人员定位系统结果如图1所示。
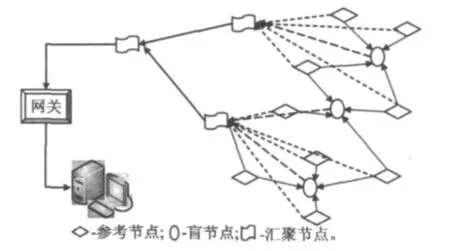
图1 系统总体设计框架Fig.1 The overall designing framework of the whole system
2 定位原理
在无线传感器网络中,传感器节点的定位可分为静态和动态两大类。静态无线传感器网络,即网络部署后所有节点静止或低速运动;动态传感器网络是指网络部署后节点需要快速移动的动态应用场景[4]。所采用的是动态传感器网络的定位,即利用ZigBee技术及各个参考节点广播的位置信息和RSSI(received signal strength indicator)值,以确定盲节点的空间位置信息。
接收信号强度RSSI的理论值可以表示为:

式(1)中,n代表信号传播常量,也称为传播指数;d代表距发射器间的距离;A代表距离1m时的接收信号强度。在基于RSSI定位中,已知的参考节点广播自己节点的RSSI值,盲节点根据接收到的信号强度计算出信号的传播损耗,利用理论和经验模型将传输损耗转化为距离,再利用已有的算法计算出节点的位置[5]。
图2为定位原理图。在图2中,参考节点1~4的位置是固定的,他们以不同的传输功率间断地广播自己的数据包给在自己范围内的盲节点,数据包中包含有该节点的源ID号、频道号、位置信息及RSSI值。源ID号是用来区分网络中各个传感器节点,每个传感器节点都具有自己独立的ID号。频道号则是用来确保所有的参考节点和盲节点所广播和接收的数据信息是在同一个频道内。参考节点能够存储一定数量的参考信息,且具有可编程性。
在图2中,节点1~4为参考节点,节点5为盲节点,不同颜色的虚线表示相对应的参考节点广播的信息所能到达的范围。
节点5为盲节点,即需要定位的节点。该节点在4个参考节点所在的区域内移动,能够实时地接听到附近参考节点所广播的数据信息。通过对这些数据信息的处理于分析,节点5将分析处理后所得到的自己的位置信息,通过传感器网络传送到主机。这个传感器网络是由分布在对应区域的所有传感器节点自组而成的。
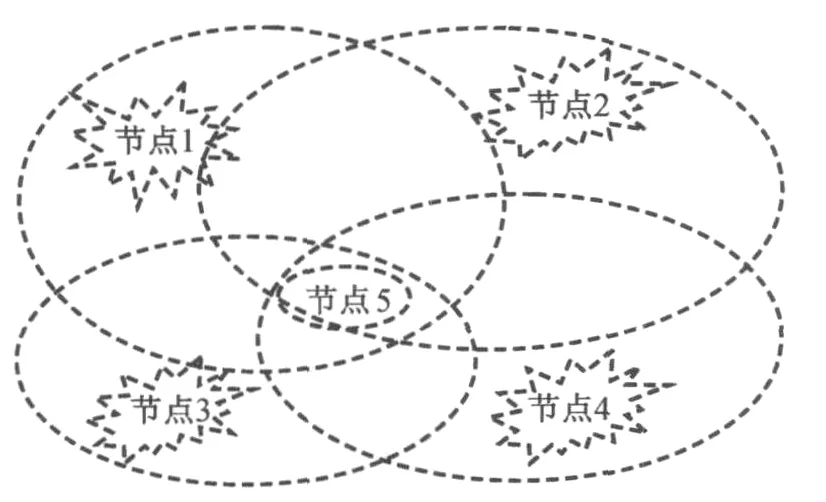
图2 定位原理图[5]Fig.2 The localization principle scheme
3 系统结构设计
文中定位系统的网络拓扑结构如图3所示。
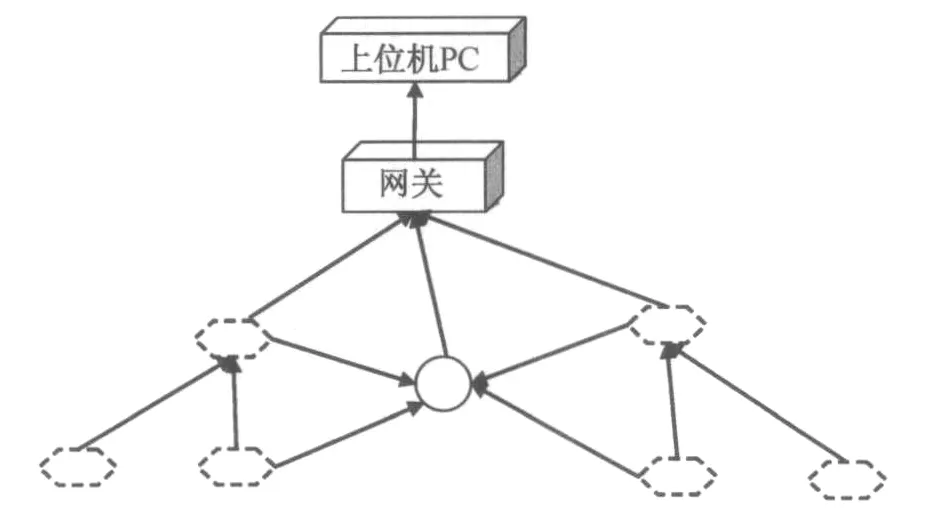
图3 定位系统的网络拓扑结构Fig.3 Network topology of the localization system
系统网络结构图中各相关模块的主要功能以及实现如下:
(1)上位机PC
通过上位机PC,可以实时向参考节点发送指令,完成对各个节点的参数设置。在上位机PC上面运行定位软件,各个节点通过无线传感器网络将信息经过网关传输给定位软件,确定盲节点的位置,完成定位功能。该定位软件能提供人机交互的良好界面。
(2)网关
网关是上位机PC与各个传感器节点间通信的桥梁。由于无线传感器网络结构于协议于因特网不同,故两种网络间不能直接进行通信。通过网关可以使得传感器节点的信息可以顺利达到上位机PC,完成协议转换,数据交换等功能。
系统中的参考节点采用CC2430芯片[OL],它是Chipcon公司推出的用来实现嵌入式ZigBee应用的片上系统,且完全支持2.4GHz IEEE 802.15.4/ZigBee协议。单个CC2430芯片整合了ZigBee射频前端、内存和微控制器,使用一个8位的MCU(8052),具有32/64/128kB可编程闪存和8kB的RAM,还包含模拟数字转换器、几个定时器、AES128协同处理器、看门狗定时器、32kHz晶振休眠模式电路、上电复位电路以及21个可编程I/O引脚[6]。参考节点的主要任务是间断地广播自己的参考信息,如位置信息及RSSI值等。
(4)盲节点 ○
系统中的盲节点采用CC2431芯片,该芯片结构于CC2430基本上相同,主要区别在于再CC2431芯片上面携带了定位跟踪引擎,使得其具有定位的功能,而CC2430无定位跟踪引擎。盲节点的主要任务是接受附近参考节点的信息,通过分析,将自己的位置信息经过无线传感网传输到上位机PC,并在定位软件上显示出该节点的位置。
4 实验结果及分析
为验证所提出的设计方案,现建立了小型的实验系统并进行了测试实验。实验系统的硬件由多个以CC2430或CC2431为核心的传感器节点和一台PC构成。通过上位机软件可以实时地刷新并显示各个参考节点和盲节点的位置信息(图4、图5)。
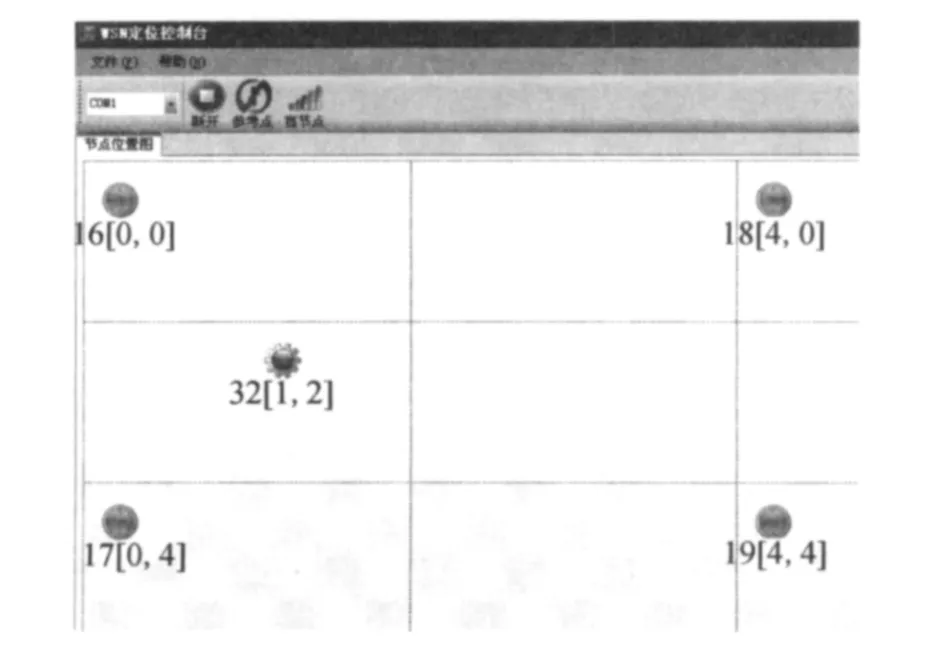
图4 一个盲节点Fig.4 One single blind node
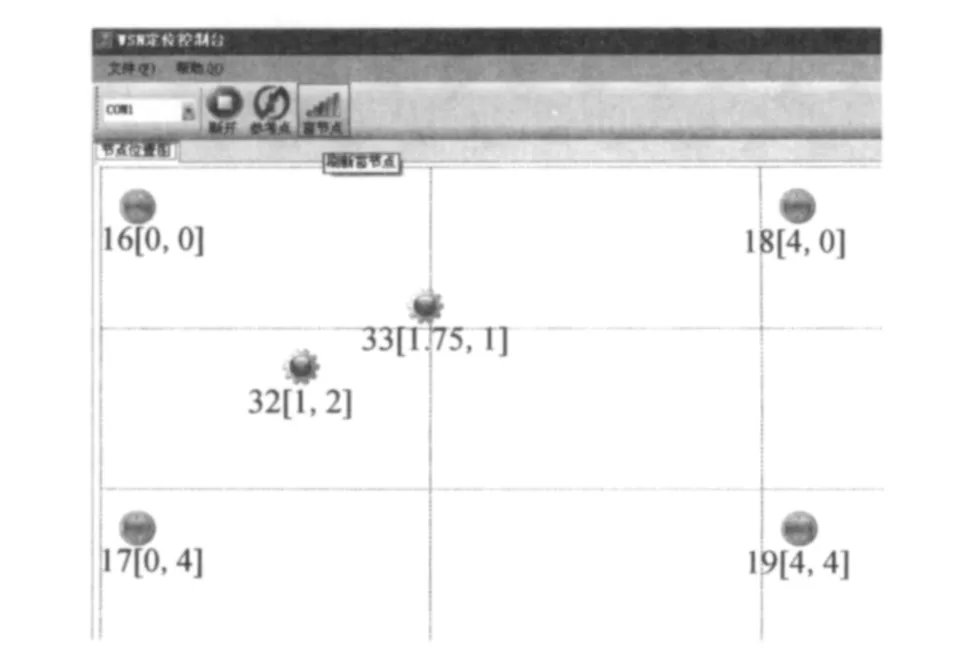
图5 两个盲节点Fig.5 Two blind nodes
通过上位机PC的定位软件,可以观察到盲节点所在的位置。为了使得实验更具参考价值,实验中分别采用了一个盲节点和两个盲节点,然后利用参考节点所广播的信息,对盲节点进行定位。该实验的实验环境是在一个40m×40m的实验室内进行,在实验室的4个角落布置4个参考节点(16,17,18,19),先采用一个盲节点(32)在实验室内移动,对实现对其定位(如图4所示);然后同时采用两个盲节点在实验室内部移动,并实现对它们的定位(如图5所示)。通过对实验结果及盲节点的实际位置的比较分析,发现实验结果虽然有些误差,但基本能实现对盲节点的定位。经分析这些误差可能是由于实验过程中人及实验器材在实验室内对RSSI信号有阻隔,使得盲节点接收到的RSSI值偏小,最终导致了实验的误差。
5 结 论
文中所提出的博物馆内人员定位系统的设计方案,具有较强的扩展性和实用性。在误差允许的范围内,试验结果还是能满足人员定位的要求。
通过在博物馆内布置一定数量的参考节点,而由这些参考节点所自动组成的无线传感器网络可以覆盖整个博物馆。在每个人员入馆的时候都分发一张预先制作好的,携带有基于ZigBee技术定位功能的CC2431芯片的入馆卡,实现对馆内人员的定位。此系统已在实验室内部试用,定位效果及运行的状态良好。未来,将建立并部署在多个房间的定位系统,争取使所提出的方案能获得实际的应用。
[1] 张洁颖.基于ZigBee网络的定位跟踪研究与实现[D].上海:同济大学,2007.
[2] 宁炳武,刘军民.基于CC2430的ZigBee网络节点设计[J].通信与网络,2008(3):95-96.
[3] 谢晓佳,程丽君,王 勇.基于ZigBee网络平台的井下人员跟踪定位系统[J].媒体学报,2007,32(8):884-885.
[4] 彭 保.无线传感器网络移动节点定位及安全定位技术研究[D].哈尔滨:哈尔滨工业大学,2009
[5] LORINCZ K,WELSH M.A robust,decentralized approach to RF-based location tracking[D].Boston:Harvard University,2004.
[6] AAMODT K.Chipcon products from texas instruments[EB/OL].[2006-01-31].http:∥www.ti.com/product/cc2430.