微机保护在高压电机启动工程设计中的应用
2012-01-19陆爱萍
陆爱萍
(昆明有色冶金设计研究院股份公司,云南昆明650051)
微机保护在高压电机启动工程设计中的应用
陆爱萍
(昆明有色冶金设计研究院股份公司,云南昆明650051)
阐述了当前微机保护监控装置的研究现状和发展趋势及高压电动机监控保护装置的原理,基于紫光DCAP-3010装置,对高压电动机微机保护在工程中的应用进行了有益的尝试。
高压电机;微机保护;监控保护装置;紫光DCAP-3010
0 引言
微机保护功能的设计思想脱离不开系统保护的设计理念。随着计算机技术与通讯技术的飞速发展,又为继电保护不断注入新的活力。目前,很多工矿企业的高压变电所都采用微机保护装置。该文微机保护的对象是电压等级为6 kV,安装容量280 kW的厂前回水泵。根据微机继电保护装置的特点:可靠性高、动作正确率高、使用及维护、调试灵活方便等,从而解决了通讯、监测及控制等等保护目的。
1 微机保护概况
电力系统继电保护的发展经历了机电型、整流型、晶体管型和集成电路型几个阶段后,现在发展到了微机保护阶段。20世纪80年代,微机保护在硬件结构和软件技术方面日趋成熟,并已在一些国家推广应用。90年代,电力系统继电保护技术发展到了微机保护时代,它是继电保护技术发展历史过程中的第4代。继电保护技术发展趋势向计算机化、网络化、智能化、保护、控制、测量和数据通信一体化发展。在实现继电保护装置网络化的条件下,整个保护装置实际是整个变电站综合自动化的一个智能终端。它可以从网络上获取电力系统运行和故障的任何信息和数据;也可将它获得的任何保护和信息数据传给控制中心。
传统保护的动作特性是靠处于“静态”的元器件或机械机构来实现的,其工作特性与完整性要通过预防性检修维护才能确认是否完好;而微机保护的动作特性是由软件经数学和逻辑运算得到,运行中装置长期处于运算推理的“动态”过程,同时对装置的硬件具有较完善的自检功能,一旦某一“动态”环节出故障,保护装置将告警并采用必要闭锁措施。当然,微机保护装置完整功能的实现,必须依赖那些正常运行时保持“静态”的外部环节。在运行及检修试验中曾出现因某些“静态”环节故障,致使保护装置不能正确动作的现象。
2 DCAP-3010高压电动机监控保护装置系统原理
2.1 系统结构
系统主要有核心控制单元(DSP)、隔离变压器、光电隔离、键盘等输入设备、显示设备等等组成。本系统结构框图见图1。该装置基于32位高性能DSP(数字信号处理器)和网络通信技术设计,主要用于6.3 kV、10 kV电压等级电动机的保护测控。
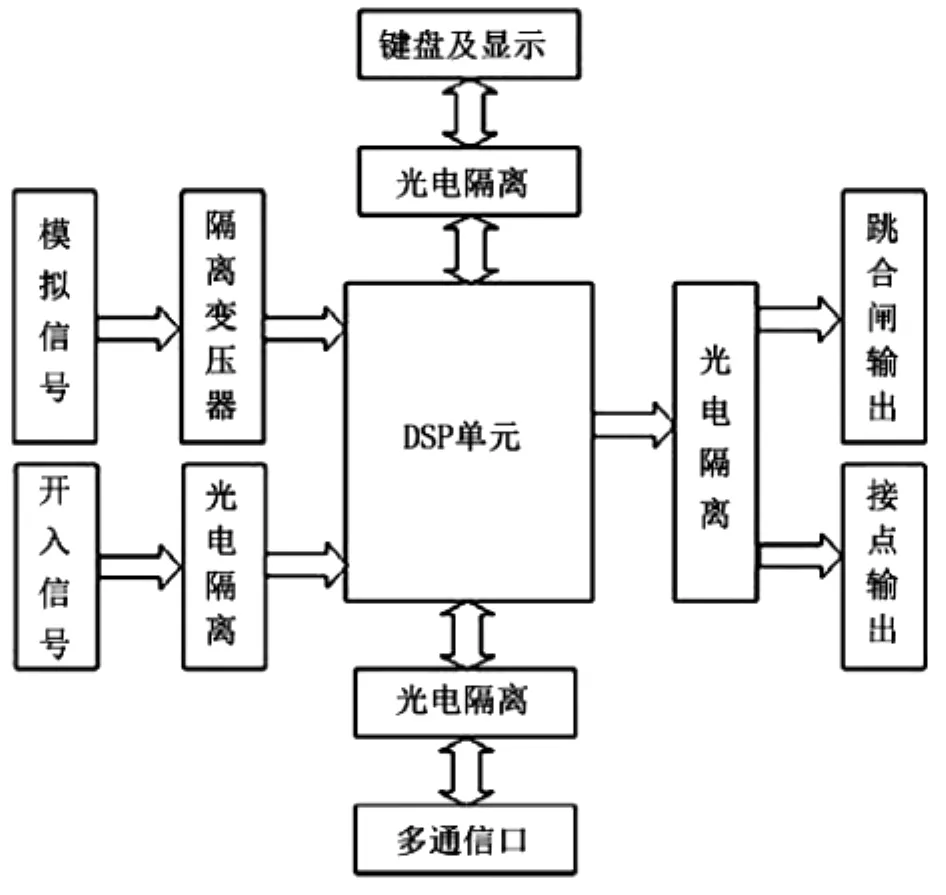
图1 DCAP-3010系统结构框图Fig.1 DCAP-3010 System Structure Block Diagram
2.2 系统配置
系统装置包括交流电压输入回路、交流电流输入回路、直流电源输入回路、开关量输入(遥信)回路、开关量输出(遥控)回路、断路器操作回路以及通讯接口。
系统装置设置有4个小PT可同时接受4个0~100 V交流电压的输入,设置有7个小CT,可同时接受7个额定为5 A或1 A的交流电流输入,其中CT1接A相保护电流Ia,CT2接B相保护电流Ib,CT3接C相保护电流Ic,CT5接A相监控电流Ia,CT7接 C相监控电流 Ic,CT6接零序电流 I0,CT4备用。上述装置内部的CT是按保护电流为三相的要求来分配的,适用于6~35 kV接地系统;对于6~35 kV不接地系统,保护电流要求为两相时CT2不接线。装置工作电源的接线端子为P+、P-,其中P+为正电源输入端,P-为负电源输入端。装置控制回路电源的接线端子为L+、L-,其中L+为正电源端,L-为负电源端。装置设有12个遥信开关量信号输入端。
设有9个开关量输出口TS1~TS8。其中,TS1~TS8输出何种保护(或几种保护的组合)跳闸信号由跳闸表来确定,通过跳闸表可灵活使用TS1~TS8出口。典型设计中TS1用于输出遥控跳闸命令,TS2用于输出保护跳闸或连锁跳闸命令,TS3用于输出遥控合闸命令,TS4~TS8备用。同时设有断路器操作回路并内置防跳继电器及跳合闸回路保持继电器。
同时还具备高速以太网接口和 RS-485(或光纤)通讯接口,该装置的各种信号和外部遥信信号可通过通讯网络上传至综合自动化系统的监控主机。
2.3 继电保护功能
继电保护功能有多种,主要表现在:(1)装置设有速断保护;(2)定时限过流保护:包括两段式定时限过流保护。其中过流1段相当于延时速断保护,过流2段为延时启动;(3)反时限过流保护,有三种方式可供选择:①极端反时限,②非常反时限,③一般反时限;(4)负序过流保护(断相保护):用于电动机三相电流不对称保护;(5)负序过压保护:当负序电压U2大于负序过压定值时,延时动作于出口;(6)低压保护:以线电压为判据,当电压Uab、Ubc、Uca均低于整定值时,延时动作于出口;(7)零序过流保护:装置包括两段式零序过流保护,当零序电流大于整定值时,延时动作于出口;(8)零序过压保护:当零序电压大于整定值时,延时启动出口或不启动出口而只发信号;启动出口时发事故信号;不启动出口时发预告信号;(9)逆功率过流保护:在装置通过计算发现一次回路向系统返送无功功率时,延时启动出口;(10)过负荷;(11)PT断线报警;(12)PT断线闭锁;(13)CT断线报警;(14)控制回路断线报警;(15)联跳功能;(16)动作及告警报告和录波。
3 DCAP-3010高压电动机监控保护装置在工程中的应用
大红山铜矿二选厂厂前回水泵站6 kV配电系统的设计选用了DCAP-3000线路监控保护装置,作为6 kV外电源进线的保护;选用了DCAP-3001馈出变压器监控保护装置对250 kVA配电变压器进行保护;选用了DCAP-3065电压互感器保护装置对电压互感器及避雷器进行保护;对于电压为6 kV、功率为280 kW的6台厂前回水泵的供配电回路,选用了DCAP-3010高压电动机监控保护装置,该装置的二次回路装设5个电流互感器CT1、CT3、CT5、CT6、CT7组成微机保护及测量回路。电动机选用的继电保护功能及参数设置全部在DCAP-3010中完成。
3.1 电流速断保护
它是整体系统的主保护,当任一相电流大于整定值时,动作于出口,可快速切断短路故障。
式中:Krel——可靠系数,取为 1.05 ~ 1.2;Kjx——接线系数,接于相电流系数取为1.0;nTA——电流互感器变比,取为75/5;Irm——电动机额定电流,取约为32 A;Kst——电动机起动电流倍数,取约为7。计算数值Iop·k=16~18 A,提供给保护装置。
3.2 反时限过流保护
该工程采用一般反时限过电流保护,是指动作时间随短路电流的增大而自动减小的保护。
式中:Fs——反时限系数;
I——主回路二次电流;
IP——反时限保护启动电流;
t——动作时间。
对于一般电动机,取 I/Ip=1.2,t=8 ~12 s,则可以得出Fs约为0.03~0.08,同时启动电流Ip取32 A,再把Ip和Fs两个参数值提供给保护装置。调整Fs可得到不同的反时限特性曲线,适用范围很广。
3.3 过负荷保护
当任一相电流大于定值时,延时启动出口或不启动出口而只发信号。启动出口时发事故信号,不启动出口时发预告信号。保护装置的动作电流
式中:Krel——可靠系数取为 1.05 ~1.2;
Kjx——接线系数,取为 1.0;
IrM——电动机额定电流,取为32 A;
Kr——继电器返回系数取为 0.85 ~0.95;计算数值 Iop·K=2.36 ~ 3.01 A,提供给保护装置。
3.4 零序保护
采用专门的零序电流互感器CT6使继电器动作来指示接地故障线路,保护装置的一次动作电流(按被保护元件发生单相接地时最小灵敏系数1.25整定),对于中性点不接地方式:

式中:IC∑——电网的总单相接地电容电流;
ICM——电动机的电容电流,在本工程中可忽略不计。
对于3~10 kV系统,总单相接地故障电容电流超过10 A时就会产生电弧。因此取电容电流IC∑=10 A,计算得出一次电流Iop≤8 A,因电流互感器变比,取为75/5,所以二次侧 Iop≤0.53 A,提供给保护装置。当零序电流大于整定值时,延时动作于出口。
利用系统装置的RS-485通讯接口和光纤接口,将采集到的数据上传至综合自动化系统的监控主机,达到远方监控的目地。
该工程采用DCAP-3010高压电动机微机保护装置,对各种复杂的故障具有很强的综合分析能力和判断能力。由于软件计算的实时性,能保证在任何时刻不断迅速地采样计算,反复准确校核,在发生故障的暂态期内,能正确判断故障。并且,当故障发生变化或进一步发展时,也能及时做出判断和自纠。由于硬件和软件资源共享,因此,无需增加任何硬件,只需增加一些软件即可获得各种附加功能,例如控制回路断线报警、连跳等功能。而且人机界面做得很好,通过操作面板上的按键可就地设定保护定值和修改各种参数以及各种控制操作。这些特点,在运行中已得到证实。
4 结语
随着电力系统规模的不断扩大,电网结构日趋复杂,现代系统对各种高压电动机保护也提出了更高的要求,研究开发具有良好适应性的通用型高压电动机保护装置,对降低开发和维护成本、提高装置的稳定性具有十分重要的作用。高压电动机微机保护系统是一个较为完善的电力综合自动化系统,该系统解决了大量人力所不可及的问题,避免了大量事故的发生,避免了人为错误操作,使设备更加安全、稳定、可靠地运行。
[1]湖南紫光测控有限公司.DCAP-3010高压电动机监控保护装置使用说明书[J].黑龙江科技信息,2009(24):47.
[2]刘建,倪建立.配电自动化系统[M].北京:中国水利水电出版社,2003.
[3]中国航空工业规划设计研究院.工业与民用配电设计手册[M].北京:中国电力出版社.
[4]方大千.实用继电保护技术[M].北京:人民邮电出版社,2003.
[5]尹星光,韩荣珍.微机继电保护发展的历史、现状及其趋势[J].广东电力,2003,16(3):11-14.
Application of Microcomputer Protection in Engineering Design for High-Voltage Motor Startup
LU Ai-ping
(Kunming Engineering& Research Institute of Nonferrous Metallurgy Co.Ltd.,Kunming 650051,China)
Current research situation and development trend of microcomputer protection monitoring device,and the principle of motoring and protecting device for high-voltage motor were expounded.The principle of highvoltage motor monitoring and protecting device was explanation.Based on Violet DCAP-3010 device,a beneficial try to application of microcomputer protection for high-voltage motor in engineering was carried out.
high-voltage motor;microcomputer protection;monitoring and protecting device;Violet DCAP-3010
TM81
A
1004-2660(2012)02-0043-04
2012-04-10.
陆爱萍(1969-),女,上海人,工程师.主要研究方向:电气自动化工程设计.
