基于目标导向法的车载逆变电源的可靠性控制
2012-01-16魏文才
魏文才
(集美大学 轮机工程学院,厦门 361021)
基于目标导向法的车载逆变电源的可靠性控制
魏文才
(集美大学 轮机工程学院,厦门 361021)
阐述了车载逆变电源的作用及车载逆变电源可靠性控制的目的和重要意义。应用以成功为导向的GO法,运用定量计算的方法准确得出某车载逆变电源的可靠性参数,并采用传统故障树法进行对比验证,证明该方法的正确性及所得参数的可靠性,论证了以目标为导向的GO法在此类应用中的优越性。此外,从可靠性方面对不同的逆变电源加以区分,为不同级别可靠性要求的电源选取提供具体参数。
车载逆变电源;目标导向法;故障树分析;可靠性控制
随着电子技术的快速发展,逆变电源在不同领域得到越来越多的应用,对其可靠性控制也提出了越来越高的要求。目前对包括逆变电源在内的电子产品的可靠性控制,通常主要从电子元器件的选取、整套设备的散热措施以及电磁防护抗干扰等方面来进行控制[1-2]。这些措施在某种程度上可以提高电源的性能,但是无法得出某个具体电源的可靠性参数,对不同设备的可靠性不能定量区分。如果没有定量区分,那么在选用电源的过程中势必会存在随机性、不确定性和模糊性,这对整个系统或设备的可靠性会产生不良影响。本文以车载逆变电源为例,不采用传统的故障树法,而将以目标为导向的GO(Goal Oriented)法引入到其可靠性计算中,从而更利于可靠性控制。
1 GO法概述
GO法是一种有效的可靠性分析方法,即以目标为导向。这是GO法与传统的以失效模式为导向的故障树分析法(FTA)的本质性区别,在处理具有多态单元的系统问题时具有其优越性。20世纪60年代,凯曼科学公司(Kaman Sciences Corporation)开发出了这种方法,将其应用于航空航天及国防工业,20世纪70年代加入了GO法的操作符,用于分析传统电站和核电站的安全性和可用性。
操作符和信号流是GO法的2个重要组成部分。GO法中定义了17种标准的操作符,操作符用来表示单元的输入、输出以及单元之间的逻辑关系,其类型代表单元的特征和功能。各单元通过信号流进行联接,代表不同的逻辑关系。信号流包括状态值和状态概率,状态值表示单元的工作状态;状态概率表示单元处于该状态时的概率。GO法尤其适用于气流、电流等有实际物流的系统可靠性分析[3]。
GO法的分析流程如图1所示。根据系统的电路图、工程图或原理图分析系统,确定其组成单元;确定边界即系统的输入输出;明确系统的正常运行状态,即确定成功准则,成功准则的不同,则评价结果也不同;系统中的各单元由相应的操作符代替,根据单元之间的逻辑关系用信号流将操作符连接起来形成GO图;GO图建立后,按照操作符的编号输入各单元的状态概率数据;按照操作符的运算规则,计算出系统的输出信号;最终对系统进行评价,判定其可靠性[4-5]。
2 车载逆变电源
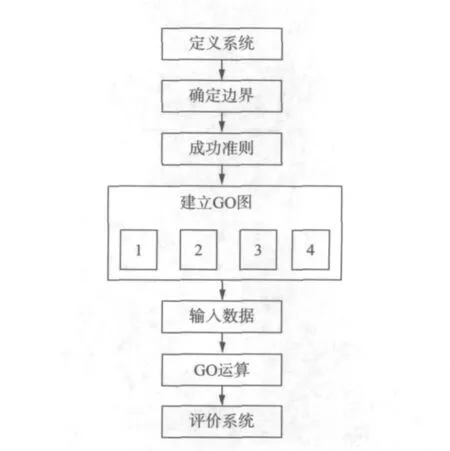
图1 GO法分析流程图Fig.1 Flow chart of GO method
随着我国汽车产业的迅猛发展,与之配套的相关产业正逐步崛起,车载电子产品越来越丰富。众所周知,任何一个车载电子设备都需要一个稳定可靠的电源,车载逆变电源综合了现代电力电子学、模拟电子技术、数字电子技术和控制技术[6],能将12V的直流电转换为和市电相同的220V交流电,从而保证车载电子设备、仪器仪表的正常工作。车载逆变电源可靠性要求高,工作环境恶劣,故对逆变电源进行可靠性控制是很有必要的[7]。逆变电源可靠性控制不仅可以使之更好地满足需求,更重要的是从可靠性的角度对不同的逆变电源加以区分,以实现不同可靠性的设备用于不同的设备和领域。
车载逆变电源一般采用2级结构,第1级是DC/DC变换器,用于将蓄电池12V的低压直流电变换成260V的直流电压;第2级是DC/AC逆变器,将直流电压逆变成修正有效值为220V的交流电[8]。
本文选用的开关电源采用全桥逆变拓扑结构,以开关器件和主变压器组成逆变主回路,将输入的12V直流电压经2次全桥逆变,然后输出稳定的交流电压[9]。其主电路结构如图2所示。
3 GO图的建立
逆变电源主电路的GO图如图3所示。图中,操作符代表的单元部件及参数如表1所示。逆变电源的主电路在建立GO图的过程中,用到了3种操作符“1”、“5”、“6”,其预算规则如下。

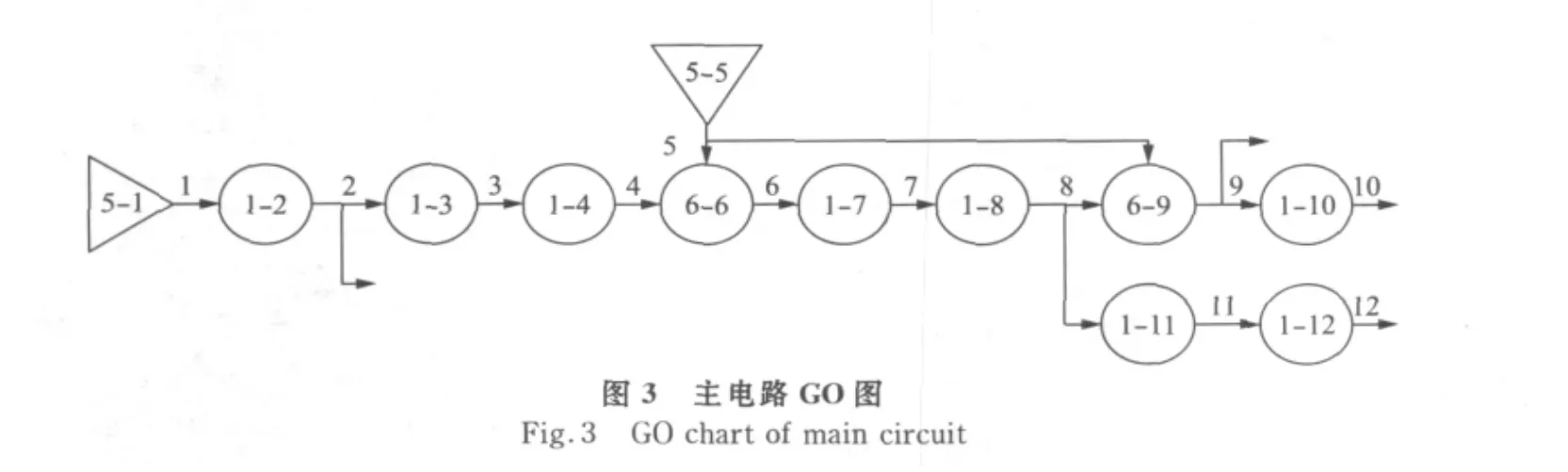

表1 主电路GO图的操作符参数Tab.1 Parameters of main circuit
类型1 两状态单元。可用于模拟电子部件有报警器、放大器、电池、断路器、线圈和传感器等,用来模拟两状态单元,即成功状态和故障状态。本系统中用于模拟去耦电路、电容、变压器、整流桥。
类型5 单信号发生器。作为GO模型的输入,可产生一个初始信号。同一个GO图中出现的不同的此类型号发生器,其信号是相互独立的。本系统中用来模拟直流输入和控制信号。
类型6 有信号而导通的原件。用来表示通过激励才能让输入通过的部件,用于模拟开关、阀和泵等。
4 定量运算
GO法可以由操作符的可靠性数据直接计算系统的可靠性参数,得到精确的结果。本文采用GO运算中的定量运算。电子元器件可靠性参数采用中华人民共和国国家军用标准《电子设备可靠性预计手册(GJB/Z 299B-98)》。元器件计数法是可靠性预计的基本方法,系统各单元的失效率通过元器件计数法得到[10-11],单元失效率表2所示。

表2 主电路GO图中各单元的失效率Tab.2 Failure rate of units
设Pj(i)为信号流j处于状态i的状态概率,P(mn)为操作符m处于状态值n时的状态概率,各信号流的状态概率如下。
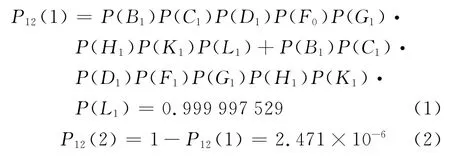
(1)信号流12表示主电路输出到控制电路的采样电压,其状态概率为
(2)信号流2表示采样电压1,状态概率为

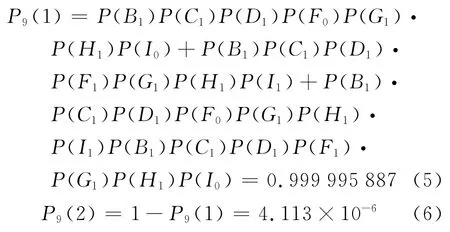
(3)信号流9表示采样电压2,状态概率为
(4)信号流10表示最终输出电压,状态概率为

5 故障树验证
故障树是一种图示模型,它由逻辑门按照系统与元件的因果关系组合而成。从顶事件触发通过中间事件将各有关的基本事件有机地连成一棵倒置的事件树。
故障树的建造过程大致分为3步:① 确定顶事件,即找出系统故障事件中最危险事件;② 确定边界条件,根据顶事件合理确定边界,从而确定故障树的建树范围;③ 逐层建树,从顶事件开始,逐级向下分解展开,直至追踪到底事件[12-13]。
用传统的故障树分析法所构造的系统故障树模型如图4所示。其中,1代表绝缘栅双极型晶体管,2代表二极管,3代表电解电容,4代表电感。
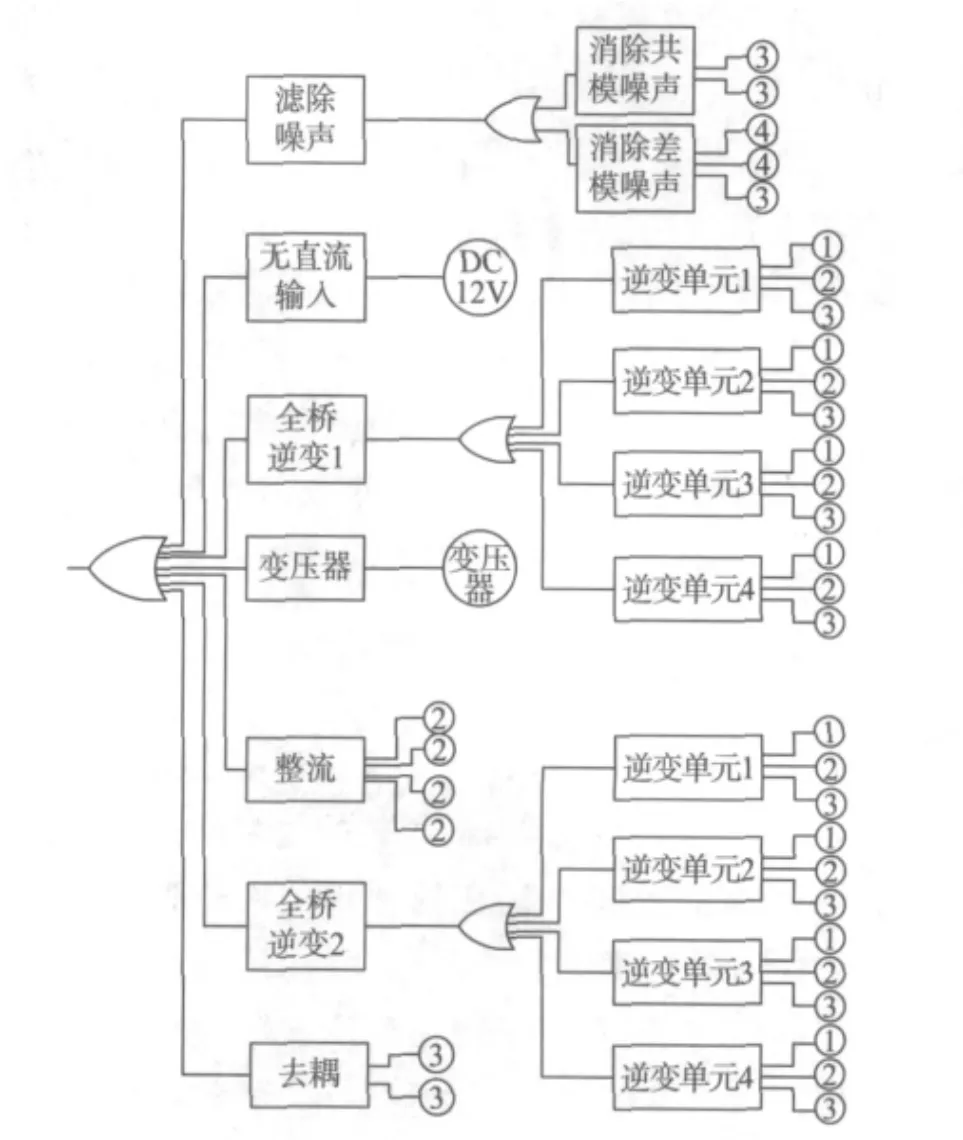
图4 故障树模型Fig.4 FTA model
设E1,E2,…,En为系统n个最小割集,则系统失效概率为

将不交型积之和利用布尔代数运算并化简,代入各单元失效率,可求出系统失效率[9],结果为

由式(10)可知,其失效率P(T)=4.163×10-6,这与 GO法的最终结果4.143×10-6相比较,基本一致,说明:GO法对分析本电源电路的可靠性是可行和正确的。此外,从以上分析过程可以看出,GO法与故障树分析法存在着一些关键的差异:①GO法包含了更多的逻辑操作码,可更加灵活和详细地模拟系统中功能各异的单元;②GO法操作码的状态数有多个,适用于多状态的单元;③GO图的物理模型比较紧凑,与原理图类似,更容易建立,且GO图的建立也较容易,而故障树相对而言则较繁琐、复杂;④ 对于同一系统,不同的人建立的GO图相差无几,而故障树的模型则可能差异较大;⑤ 故障树受到顶事件的限制,若时间被重新规定,则模型需要重新建立[14-15]。
综上所述,GO法和故障树都能很好地模拟分析大多数系统,只是侧重点不同。有时,故障树更为方便和直观,但是对于与本文电源系统相类似的其他系统而言,因其单元状态不是简单的是或否,故GO法在处理类似问题上具有其独特的优越性,能更准确地描述系统,使分析简单化、明了化,具有很强的实际意义。
6 结 语
本文采用GO法分析了车载逆变电源的可靠性,得出可靠性参数,与传统的故障树法进行对比验证,结果证明GO法在处理和分析此类系统的可靠性问题上是切实可行的,并比故障树法具有相应的优势,更有利于可靠性参数的获取。本文选用了一个简单的例子进行分析,旨在提出一种可靠性控制的方法,使可靠性这一重要参数能够更加明显地体现在设备的选型中。不仅仅是逆变电源,其他有可靠性要求的设备或系统都可采用类似方法计算出其可靠性,为可靠性控制提供确凿有力的数据支持。
[1]郑丹玲,陈 莉.电子可靠性工程研究[J].重庆邮电学院学报:自然科学版,2006(Supp1):124-127.
[2]徐小宁.开关电源可靠性设计研究[J].电气传动自动化,2009,31(3):27-31.
[3]Chu B B.Overview manual GO methodology:EPRINP-3123-1[R].Washington D C,USA:E-lectric Power Research Institute,1983.
[4]尹宗润,慕晓冬.基于GO法的航空电子设备可靠性评估[J].计算机工程,2009,35(15):272-274.
[5]任 鑫,赵新文,蔡 琦.基于GO法的船用反应堆设备冷却水系统DPSA研究[J].中国舰船研究,2010,5(5):69-71,76.
[6]严仰光,阮新波.直流开关电源的软开关技术[M].北京:科学出版社,2000:35-66.
[7]张 喆,吕长志,李志国.开关电源技术的现状与可靠性[C]//2007第12届全国可靠性物理学术讨论会论文集.都江堰:中国电子学会可靠性分会,中国电子元件分会,2007:224-228.
[8]杨成明.车载逆变电源的研究与设计[D].大连:大连海事大学,2005:8-50.
[9]朱保华,张峰平.对车载逆变电源技术的研究[J].中国电力教育:2009年管理论丛与技术研究专刊,2009:208-210.
[10]沈祖培,郑 涛.复杂系统可靠性的GO法精确算法[J].清华大学学报:自然科学版,2002,42(5):569-572.
[11]徐 志,陈彬兵.用马尔可夫和GO法对PLC系统可靠性分析[J].微计算机信息:测控自动化,2009,25(12-1):35-36,78.
[12]范晓勇,贾晓静.基于故障树的电子系统故障诊断与预测[J].微计算机信息:测量自动化,2009,25(12-1):96-97.
[13]李琼哲.故障树分析的数学基础[J].核工业研究与设计,2009(1):64-66.
[14]沈祖培,高 佳.GO法原理和改进的定量分析方法[J].清华大学学报:自然科学版,1999,39(6):15-19.
[15]徐文征.GO法与故障树可靠性建模的比较研究[J].北京轻工业学院学报,1999,17(2):41-45.
Reliability Control of Vehicle-Borne Power Inverter Based on Goal Oriented Method
WEI Wencai
(Marine Engineering Institute,Jimei University,Xiamen 361021,China)
This paper introduces the function of vehicle-borne power inverters,its goal and importance for reliability control of vehicular power inverter.A success-driven GO model and a mathematical method are used to get the reliability parameters of a specific vehicle-borne power inverter.In addition,the traditional fault tree analysis(FTA)is used to check the result,showing that the GO theory is valid in analyzing the electronic system.According to the parameters,we can distinguish different power inverters and choose right ones for different reliability requests.
vehicle-borne power inverter;goal oriented theory;fault tree analysis(FTA);reliabilitycontrol
U 463.63;TB 114.5
A
2095-0020(2012)01-0022-05
2011-10-20
魏文才(1987-),男,硕士生,专业方向为船舶自动化及可靠性研究,E-mail:weiwencai1987@yahoo.com.cn
