基于MC9S12HY32的电动汽车仪表盘设计
2012-01-15刘源杨马建辉王知学李研强
刘源杨,马建辉,王知学,李研强
(山东省汽车电子重点实验室山东省科学院自动化研究所,山东 济南 250014)
电动汽车仪表盘是一种集LED、LCD显示技术、步进电机控制技术于一体,适应电动汽车电子化、数字化、信息化发展的高新技术产品,它是驾驶员与汽车进行信息交流的窗口,是一个多信息显示平台,显示电机状态、电池组状态、行驶信息、底盘信息、指示报警等其它信息。Freescale的S12HY32是汽车仪表盘设计专用16位MCU,笔者以S12HY32为核心设计了一款电动汽车仪表盘,它采用步进电机进行指针的指示,具有很好的数据控制特性,并能及时反映汽车加减速、电压电流上升与下降等各种工况,提高了整个系统的平稳性和定位精度,同时保留了机械指针指示的直观、有动感、符合驾驶员习惯等优点。采用LED显示转向灯、远近光变换、车门状态、安全带未系提示、充电指示、报警等状态[1],采用LCD数字显示里程表和故障状态。文中介绍S12HY32的功能特性和应用要点,并剖析电动汽车仪表盘的设计原理和软硬件结构。
1 硬件设计
1.1 MC9S12HY32简介
MC9S12HY32是一款可扩展入门级的汽车仪表盘应用16位微控制器,集16位性能和许多专用功能于一身[2],如LCD驱动和步进电机驱动,同时服务于需要CAN/LIN的应用,非常适合经济高效的汽车仪表盘应用。其芯片资源及特性如下[3]:
1)32 MHz总线频率的HCS12 CPU内核;
2)带有ECC(错误校正码)的32 kB程序闪存和4 kB数据闪存,4 kB片内SRAM;
3)字段式LCD控制器,最多可配置为40x4段;
4)4个步进电机控制器,可以进行电机失速检测;
5)两个16位定时器模块,可提供16位输入捕捉、输出比较、计数和脉冲累加器功能;
6)8通道10位逐次逼近型ADC;
7)SPI/I2C 模块,一个 SCI模块,支持 LIN 2.0、2.1和 SAE J2602通信;
8)MSCAN模块,支持 CAN协议 2.0A/B。
1.2 系统结构
仪表盘由CAN总线接口、信号采集电路、步进电机、LCD、LED、报警装置组成,用于各种工况下汽车运行信息的采集和显示,图1给出了仪表盘硬件结构,下面结合S12HY32的内部资源介绍下仪表盘的硬件设计。
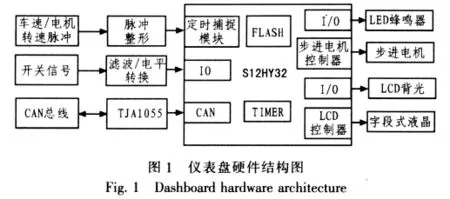
S12HY32内部资源专为仪表应用而设计,4个步进电机驱动器可以进行车速、电机转速、电流和电池组电压的指针指示,LCD控制器可以控制字段式LCD显示总里程、小计里程和电机故障信息,内部有MSCAN模块支持CAN总线应用,可以通过CAN总线获取一些关键信息,同时保留直接进行信息采集的能力:内置定时捕捉模块可以进行车速/电机转速脉冲的捕捉与统计,内置ADC进行电机温度等模拟量的采集。下面以车速信号检测为例介绍下仪表盘电路设计。
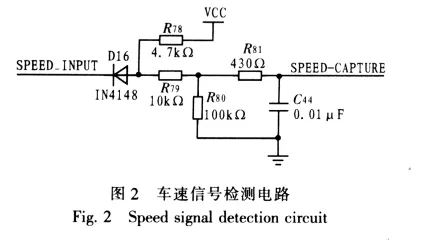
1.3 车速信号检测
车速是仪表盘需要显示的关键信息,根据汽车原理和拓扑结构,车速信号来源是CAN总线或者车速传感器。车速传感器输出0~12 V的脉冲信号,其信号频率大小与车速值大小成线性关系,随车速增加而增加[4],通过图2所示的整形电路将车速传感器信号转换为TTL电平,然后通过定时捕捉模块捕捉脉冲信号的上升沿或下降沿,进行统计分析即可得到车速大小。
2 软件设计
2.1 软件流程设计
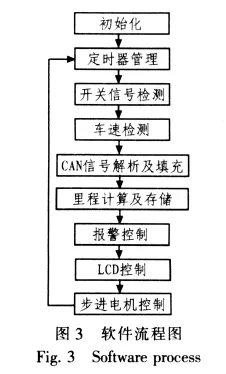
因为没有采用操作系统,软件设计采用循环体+中断的软件结构[5],主循环体完成主体功能,中断服务程序进行底层协议设计和驱动管理,软件流程图如图3所示,下面简单介绍一下该流程。首先进行全局变量和所用外设 (包括IO、PWM、TIMER、SCI、CAN、LCD、MOTOR CONTROLLER) 的 初始化,初始化完成后,进入主循环,然后在循环体内依次进行定时器管理、开关信号检测、车速检测、CAN通讯管理、里程计算及存储、报警控制、LCD控制和步进电机控制。各软件模块次序如图3所示。下面以车速检测为例介绍下软件的详细设计。
2.2 车速信号检测软件设计
车速信号整形后得到TTL脉冲,S12HY32的定时捕捉模块以中断的方式捕捉脉冲的沿变化[6],在中断处理函数中进行脉冲个数累加。设计脉冲统计结构体和一200 ms的周期定时器,采用“滑动时间窗口脉冲统计法”进行车速的计算,脉冲统计结构体设计如下:
typedef struct{
uint8_t bank;
uint16_t cnt;
}s_PulseCnt;
在上述结构体中,cnt表示脉冲个数,bank表示数据是否有效。滑动时间窗口脉冲统计法设计如下:
定义成员个数为6的脉冲统计结构体数组Speed_pulse[6],周期性存储车速脉冲个数,脉冲率等价于一秒内的脉冲个数,则有公式如下:

FACTOR由变速比和轮胎直径共同决定。
当下计算的车速表示过去1 s内的平均车速,在下一个200 ms到达后,将下标为1到5的结构体变量依次“滑动复制”到下标为0到4的结构体变量中,然后更新下标为5的结构体变量,此时根据公式(1)和公式(2)进行计算得到的车速为0.2~1.2 s之间的平均速度。这种方式计算得到的车速实时性更强,而且车速变化更加平滑,反映在指针的变化上也更加平稳平滑,能得到更佳的视觉体验,其代码实现如下:
void SpeedDetect(void)
{
uint16_t i,j;
uint16_t Carspeed_pulse_frequency=0;
if(1==Speed_detect_enable){
if(1==Timer[SPEED_PULSE_ACCUMU_200MS].overflow_flag){
for(i=0;i<=5;i++){
if(0==Speed_pulse[i].bank){
Speed_pulse[i].cnt=Car_speed_pulses;
Speed_pulse[i].bank=1;
if(5==i){
Carspeed_pulse_frequency=Speed_pulse[5].cnt-Speed_pulse[0].cnt;
Ev_speed =(float32_t)Carspeed_pulse_frequency*CAR_PULSE_FACTOR;
EvSpeedRangeCheck();
for(j=0;j<5;j++){
Speed_pulse[j].cnt=Speed_pulse[j+1].cnt;
}
Speed_pulse[i].bank=0;
}
break;
}
}
}
}
}
3 结束语
笔者采用MC9S12HY32设计实现了一款电动汽车仪表盘,从处理器特性、硬件结构、车速信号检测等方面描述了仪表盘的硬件设计,从软件流程设计,车速信号检测的软件实现上描述了仪表盘的软件设计。该仪表盘经装车试验,运行稳定,功能可靠,已经进入小批量预生产阶段,具有很高的实用价值。
[1]戴方全,王建.基于μC/OS-Ⅱ的全数字汽车仪表[J].汽车科技,2007(4):43-46.DAI Fang-quan,WANG Jian.Study of digital dashboard based on μC/OS-Ⅱ[J].Auto Mobile Science&Technology,2007(4):43-46.
[2]朱维杰,于湘珍.基于MC9S12HZ的智能汽车组合仪表[J].仪器仪表用户,2009(2):46-48.ZHU Wei-jie,YU Xiang-zhen.Design of intelligent automotive dashboard based on MC9S12HZ[J].Electronic Instrumentation Customer,2009(2):46-48.
[3]Freescale semiconductor.MC9S12HY64 Reference Manual Covers MC9S12HY/HA Family[EB/OL].(2010 -11).http://www.freescale.com/files/microcontrollers/doc/ref_manual/MC9 S12HY64RMV1.pdf.
[4]王知学,马建辉,车晓波,等.基于MC9S12XS128的汽车BCM的设计与实现[J].电子设计工程,2011(3):190-192.WANG Zhi-xue,MA Jian-hui,CHE Xiao-bo,et al.Design and implementation of vehicle BCM based on MC9S12XS128[J].Electronic Design Engineering,2011(3):190-192.
[5]钟龙平,陈建清,缪传杰,等.基于CAN总线的组合汽车仪表盘的设计[J].传感器世界,2010(4):32-36.ZHONG Long-ping,CHEN Jian-qing,MIAO Chuan-jie,et al.Design a combined-type car dashboard based on CAN bus[J].Sensor World,2010(4):32-36.
[6]王春武,姜文龙,刘春玲,等.霍尔车速传感器检测系统设计新方法[J].微计算机信息,2009(29):198-199.WANG Chun-wu,JIANG Wen-long,LIU Chun-ling,et al.The new design method of a detecting system for hall vehicle speed sensor[J].Microcomputer Information,2009(29):198-199.
