河口底边界层座底支架稳定性实时监测技术
2012-01-09杨日魁吴加学
杨日魁,刘 欢,吴加学
(中山大学近岸海洋科学与技术研究中心,广东 广州510275)
河口底边界层座底支架稳定性实时监测技术
杨日魁,刘 欢,吴加学
(中山大学近岸海洋科学与技术研究中心,广东 广州510275)
河口水文座底式观测中,如何确保支架的稳定性是一个关键问题。现有的方法是通过回收数据推测测量过程中支架的状况,缺乏观测期间支架状态的实时监测。利用声学原理设计了一套简单的实时通讯姿态监测仪,实验结果表明,监测仪可将座底支架的姿态信息从河床底部实时传送到测量船,提供支架姿态实时的时间序列信息,为获取高质量的观测数据提供了可靠的技术保障。
水文观测;声学通讯;三角架;姿态监测
河口底边界层流是河口动力与泥沙输移的基本与关键过程,也是河口海岸学领域具有挑战的难题和热点问题之一[1]。在现场观测方面,近岸底边界层研究真正取得突破是采用了装载系列高分辨率观测设备的座底式三脚架(或四脚架)系统[2]。三脚架系统因其不受环境水流扰动而具有良好的稳定性,目前已经成为近岸底边界层与湍流研究的首选观测手段[3-7]。在座底三角架(四角架)使用中,电缆拖拽会造成支架的晃动,以及一系列潜在的不安全因素,如电缆防水的密闭性,电缆与缆绳的缠绕等,因此现场观测多采用自容式,而非实时的数据传输。
座底三脚架底边界层流的观测一直存在着以下难题:(1)投放时无法保证支架正立;(2)测量过程支架的姿态不为水流的冲刷或泥沙搬运变化所改变。经验表明,支架投放触底后约有30%的可能会倾倒;即使投放后支架平稳,在测量过程中支架发生倾斜或翻侧的概率也是很高的,尤其在水流比较急、泥沙流动大的区域[8]。缺乏有效的姿态监测手段,无法了解测量期内座底自容设备的姿态情况,等到测量结束后才发现支架倾斜的事情时有发生。以2010年6月在珠江口崖门的观测为例进行说明。图1为座底支架上ADCP的一段测量数据,仪器姿态角的数据表明,支架在9:00发生了较大倾斜,从而导致仪器测量的压力值从21.8 m跳升至22.6 m,流速值从0.6 m/s左右下降到-0.4 m/s左右。由图1可以看出,如果观测期间支架的状态发生改变,安装在支架上的声学仪器设备其工作性能和测量数据的准确性往往会受到较大的影响,致使测量数据出现较大的偏差,甚至不可用。为此,有必要采取有效的措施进行实时监测,以保证测量数据的准确性。

图1 三脚架系统中ADCP姿态与测量流速时间序列
1 确保支架稳定性的传统方法
为了提高投放时支架直立的可能性,在座底观测中一般会采用4种方法:
(1)床底地形探测
船只到达测量预设地点后,使用双频测深仪对附近的河床进行扫描,重点查看河床地貌和淤泥厚度。避免将支架投放在淤泥沉积比较深厚的、河床不平、大的岩石、挖沙造成的沙坑等地貌上。

图2 坐底支架实物图
(2)增大座底支架底部受力面积
防止支架倾斜的有效方法是加大支架与地面的接触面积,通常做法是在支架底部安装塑料板或木板(图2)。
(3)降低支架重心
降低重心的有效方法是在支架的底部增加铅鱼,但负重越大,支架由于自身重量下陷的可能性也越高。由于近岸河口多为淤泥或细沙底质,因此需在稳定性和安全性之间取得平衡。
(4)水下拍摄
利用水下摄像机或照相机进行姿态的监测是一种有效的方法。支架投放过程中的不安全性决定了通过电缆连接水下照相设备以监测支架的姿态是不可取的。但可通过一次性投放回收摄影系统,脱机拍摄投放后支架的初始状态并回收观看录像,以此判断支架投放后是否平稳,其具体设计及操作步骤如下:
在支架上安装水下照相机,相机拍摄的目标是一个透明密封盒,盒子里安装了重力垂线,垂线指向的是由不同直径组成的同心圆环。把密封盒子固定在支架上并配置了灵巧的机关,投放完成后通过机关将照相机回收上来,然后通过观察照相机里拍摄到的视频就可以确定支架的姿态。垂线停留在正中央则表示正立,停留在外围不同环圈上则表示大概倾斜的角度(图3)。
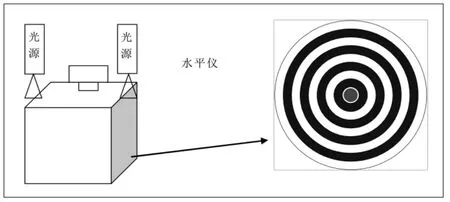
图3 水下摄像装置设计图
这种方法虽然监测到了支架在投放后的初始状态,但在测量过程因水流的冲击、泥沙的搬运等造成支架倾斜等意外情况仍然是无法确定的,需要进一步设计方案对座底支架的姿态进行实时监测。
2 测量姿态监测系统设计
测量姿态监测系统由两大部分组成:发射器和接收器。鉴于电磁波无法在水下传输,因此利用声波进行水下信号传输。在设计系统时,我们重点放在以下两个问题上:
(1)换能器的选择。考虑到现场观测的实际情况,发射器发射的波束角应足够大,发射功率应较高,以便放置于船上的接收器能有效接收信号。因此在设计时,我们使用了3个换能器单元组合形成一个发射阵,解决波束角限制的问题,即使在支架出现比较大角度倾斜的情况下,也能保证发射器发射的声波到达接收器。
(2)水密性。由于发射器随支架一起沉入水底,须保证发射器能有效防水。经过反复的比较和试验,我们选择了一种可密封瓶,并于瓶口涂抹防水硅胶。经过试验,在20多m水深处其密封性能仍然较好,能有效满足水下作业的要求。
2.1 发射器
发射器由姿态传感器、主机、声纳发射头组成(图4)。姿态传感器共有4个倾斜角度信号输出,在密封水瓶里预设4个不同高度的不锈钢圆丝网作为接触点,并注入常温下的饱和盐水,当瓶子倾斜到不同角度就会短接不同的钢丝网,姿态传感器就输出相应的倾斜信号,通过水密插头连接到主机盒里。主机也密封在另外一个盒子里,由一个单片机单元和外围驱动组成,模拟信号经过处理后以高低电位的形式送入单片机的输入口,经过调制编码后升压成100 V的脉冲输出驱动发射头。
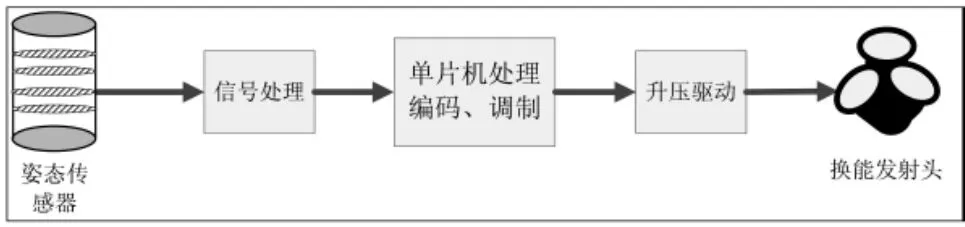
图4 发射器设计图
2.2 接收器
接收器由接收主机和受听器组成。接收主机主要由单片机构成,密封在瓶中,负责接收有效声波信号,经过滤波等处理后从信号里解调出对应的姿态信号,并驱动对应通道的声光提示(图5)。声纳受听器接收信号后,通过水密线输入接收单元,根据事先定义好的编码规则对接收到的声信号进行调制解码,解码后的信号输出到对应的信号通道驱动喇叭和警报指示灯,4个颜色指示灯对应姿态传感器的4种倾斜信号。按照设计,在20 s内如果检测到支架上发来的声波信号,则工作指示灯就一直处于每2 s闪烁一次的正常通讯提示;否则长时间熄灭,表示与发射机的通讯失败。
监测系统实际完成后如图6所示。制作完成的监测系统分3个密封盒,满足野外和水下作业的需要。

图6 姿态监测系统
3 监测系统测试与应用
通过室内实验证明监测系统运行可靠后,在2010年8月的野外测量中,配合座底支架投入实际使用。在测量现场将姿态传感器稳定地垂直固定在支架的垂直杠上,其他的换能头和主机盒子挂载在合适的位置(图7)。

图7 实物安装图
当支架触底稳定后,接收器的蓝色信号灯亮起,表明支架投放后发生倾斜。重新将支架稍微提高后再次投放,通过姿态监测仪调整投放,以保证投放后支架垂直座底。
在测量过程中,通过安装在支架上的发射器不断送回的信号,观测人员就可以判断支架的工作情况,一旦发现异常,可以在最短时间内解决和处理问题,为实时监测提供了有效的保障。
通过野外观测的实际使用,总结监测系统的性能如下:
(1)准确性分析。监测系统基本上能准确反应支架的状态。在8个全潮的观测过程中,前7个全潮每次投放和回收的过程中,系统均能正确发送出支架的状态信息。在最后一个全潮的观测中,接收器通讯提示灯完全灭去,表示与发射器的通讯中断。测量结束后回收监测系统,发现发射主机渗水,已经停止工作。
(2)通讯距离。根据目前配置和功率估计,水下通讯距离在100 m左右是可靠的。在测量过程恰好碰到一次大雨过程,风浪大、水流急,船只漂移比较远,距离支架的入水点大约100 m左右。此时,接收器收到的信号出现不稳定。尝试接收器方向搜索,当受听器对准支架上的发射器时,信号恢复正常。由此表明,虽然采用了三个换能头组成的发射阵,但船只偏移后由于受听器的波束角狭窄导致了无法全向接收信号。因此应考虑采用多只受听器组成一个全向受听群,以增大接收范围。
(3)低能耗。使用结果表明,实验所使用的18节5号电池组成的12 V电池包供电,可以完成3个全潮的测量。
4 结论
应用声学原理设计了一套简单有效的水下姿态监测仪,并通过现场观测试验,检验了技术方法的可行性。该检测仪能够有效地监测水下座底三脚架姿态,为获取底边界层高质量观测数据提供了技术保障。同时现场观测试验表明,需要在以下几个方面进一步完善改进:
(1)为了提高精度、减小体积、避免腐蚀,使用电子罗盘模块作为姿态传感器具有明显的优势。
(2)为了方便进行数据方式分析,需要进行全程监测姿态数据保存。
(3)增加液晶屏幕显示,方便测量工作人员的监测。
(4)在水密性工艺和材料选择方面还需进一步的探索。
[1]Uncles R J.Estuarine physical processes research:Some recent studies and progress[J].Estuarine,Coastal and ShelfScience,2002,55:829-856.
[2]Cacchione D A,Sternberg R W,Ogston A S.Bottom instrumented tripods:History,applications,and impacts[J].Continental Shelf Research,2006,26:2319-2334.
[3]Ali A,Lemckert C J.A traversing system to measure bottom boundary layer hydraulic properties[J].Estuarine,Coastal and Shelf Science,2009,83:425-433.
[4]Mohrholz V,Prandke H Lass H U.Estimation of TKE dissipation rates in dense bottom plumes using a Pulse Coherent Acoustic Doppler Profiler(PC-ADP)-Structure function approach[J].Journal ofMarine Systems,2008,70:217-239.
[5]Liu GF,Zhu J R,WangYY,et al,Tripod measured residual currents and sediment flux:Impacts on the siltingof the Deepwater Navigation Channel in the ChangjiangEstuary[J].Estuarine,Coastal and ShelfScience,2010.
[6]徐俊杰,何青,王元叶.底边界层水沙观测系统和应用[J].海洋工程,2009,27(1):55-61.
[7]刘志宇,魏皓.黄海潮流底边界层内湍动能耗散率与底应力的估计[J].自然科学进展,2007,17(3):362-369.
[8]Liu H,Wu CY,Xu WM,et al.Contrasts between estuarine and river systems in near-bed turbulent flows in the Zhujiang(Pearl River)Estuary,China[J].Estuarine,Coastal and ShelfScience,2009,83:591-601.
A Real-time Monitoring Technique for Tripod Stability in Estuarine Bottom Boundary Layers
YANG Ri-kui,LIU Huan,WU Jia-xue
(Research Center for Coastal Marine Science and Technology,Sun Yat-sen University,Guangzhou Guangdong 510275,China)
How to ensure the stability of the tripod is a critical issue in bottom boundary layer observations in coastal area.However,the existing methods lack the ability of real-time monitoring of the tripod state.A posture monitor was designed based on acoustic mechanism with real-time communications.The experimental results showed that the monitoring can effectively transfer the state signal from the bed to the vessel and can obtain time series of the tripod state during the whole survey.This simple and reliable technique provides the strong guarantee for the BBL observations in the shallow waters.
hydrological observation;acoustic communication;tripod;posture monitoring
P714+.1
B
1003-2029(2012)01-0045-04
2011-11-07
国家自然科学基金资助项目(40976053,41006050)
杨日魁(1972-),工程师,主要研究方向为海洋监测技术与数据处理。
吴加学(1968-),男,教授,研究方向为海洋动力沉积过程与沉积声学。Email:wujiaxue@mail.sysu.edu.cn