IKAROS太阳帆的关键技术分析与启示
2012-01-08沈自才张帆赵春晴刘宇明丁义刚牟永强
沈自才 张帆 赵春晴 刘宇明 丁义刚 牟永强
(北京卫星环境工程研究所,北京 100094)
1 引言
大型薄膜展开式结构[1-3],具有成本低廉、存储体积小、质量轻、可靠性高等优点,能够实现传统结构很难达到的性能,成为空间研究和开发的热点,其在各类航天器上的应用将是今后航天事业的发展方向和技术发展的必然趋势。
太阳帆是大型薄膜展开结构的典型应用之一,它的原理是利用太阳在大面积薄膜上的反射光压提供航天器飞行的动力,因此,要求薄膜具有面积大、质量轻、反射率高等特点。此外,大面积可展开式薄膜太阳电池阵、太阳遮光罩、聚光镜等也是大型展开结构的应用方向。
日本宇宙航空研究开发机构(JAXA)于2010年5月21日利用H-2A 运载火箭在种子岛航天中心搭载拂晓号(AKATSUKI)金星气候轨道器成功发射太阳帆演示航天器——太阳辐射驱动星际风筝航天器(Interplanetary Kite-craft Accelerated by Radiation of the Sun,IKAROS)[4-5],首次实现了太阳帆的在轨展开和运行,其在设计、制备、姿态控制等各个方面均实现了较大的突破。
本文首先对目前国际上的太阳帆发展现状进行了介绍,其次对日本IKAROS太阳帆及其关键技术进行了阐述,最后结合国际上太阳帆的发展现状,分析了我国开展大型展开结构研究所应关注的方向。
2 国际太阳帆发展现状
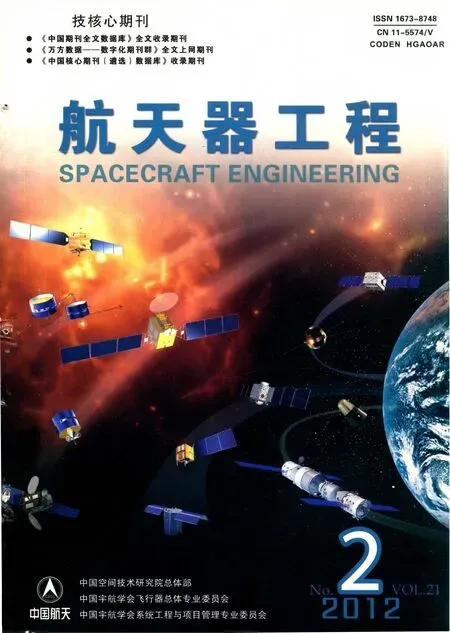
自20世纪90年代开始,美国、日本和俄罗斯等国纷纷开展了多次太阳帆空间展开试验(见表1),但大多以失败告终,直到2010年5月,日本发射IKAROS太阳帆,成功实现了太阳帆的在轨展开演示,开辟了空间太阳光压推进的新时代。部分太阳帆展开示意见图1[6-7]。
进入21世纪,世界航天大国进一步加大了对太阳帆推进的研制,先后于2007年6月和2010年7月在德国和美国召开了第一届和第二届太阳帆国际论坛[8-9],对太阳帆的设计、制备、展开方式、姿态控制等进行了研讨,并计划进一步开展大量的太阳帆在轨飞行试验验证,具体情况见表2。

表1 国际太阳帆试验的历史Table 1 History of world solar sail test
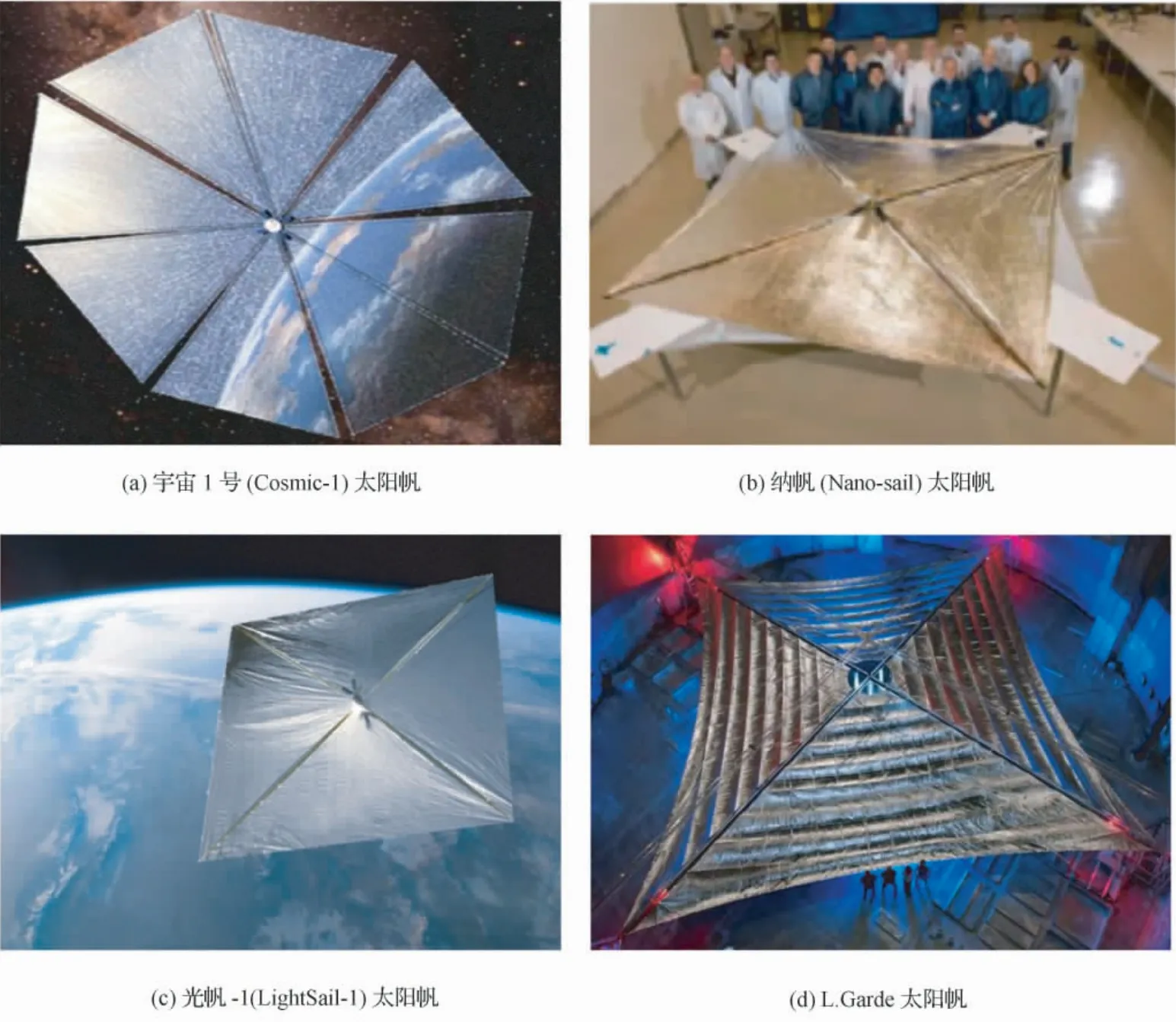
图1 太阳帆展开示意图Fig.1 Sketch of solar sail deployment
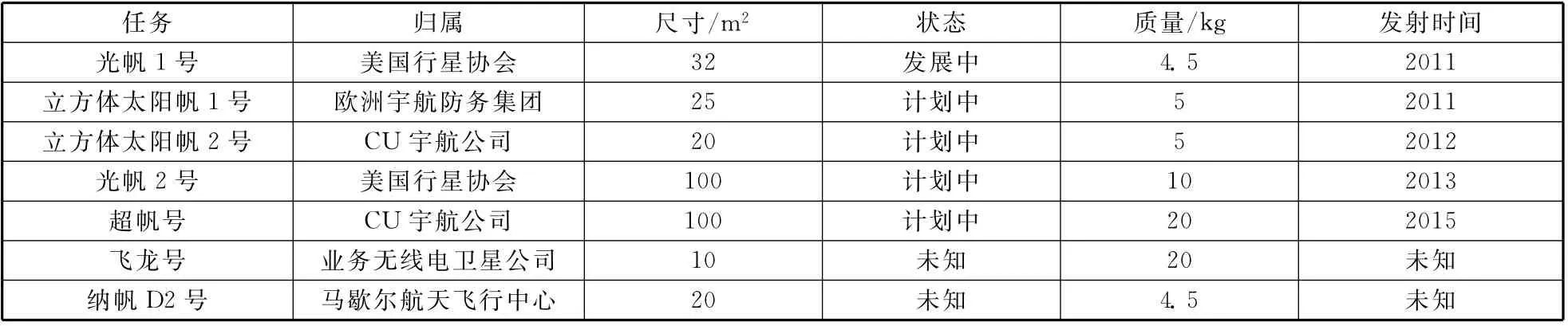
表2 发展中的太阳帆Table 2 Solar sail in development
3日本IKAROS太阳帆及其关键技术
日本的IKAROS是第一个成功实现太阳帆在轨展开且成功飞行的航天器。以下对其基本概况和关键技术进行介绍和分析。
3.1 IKAROS概况
IKAROS于2010年5月21日,利用H-2A 运载火箭在种子岛航天中心搭载拂晓号金星气候轨道器升空,航天器总质量307kg,装备了厚度为7.5μm、质量为16kg的四方形太阳帆,太阳帆利用航天器的自旋离心力展开。
IKAROS的设计任务主要包括以下4个方面。
1)太阳帆的空间展开
利用航天器自旋离心力实现200m2的四方形太阳帆展开,并利用姿态敏感器和相机对太阳帆展开过程及展开后的情况进行监测。
2)利用太阳帆上薄膜太阳能电池发电
太阳帆上5%的面积覆盖有无定形硅柔性太阳电池,可利用帆上电缆实现电的传输,并利用这些传输线实现伏安特性曲线和其他特性的测试。
3)验证太阳帆上的太阳辐射压
太阳帆上的太阳辐射压约为1~2mN,并利用定轨技术测试太阳辐射压加速。
4)建立太阳帆导航和巡航技术
通过调整太阳帆方向,实现经由太阳辐射压的连续轨道机动,利用反射控制技术实现太阳帆姿态控制。
其中,1)和2)为本次任务的最低目标,3)和4)为本次任务完全成功的目标,IKAROS在轨任务路线如图2所示。
图2 IKAROS在轨任务路线图Fig.2 Mission sequence of IKAROS
3.2 IKAROS的关键技术
3.2.1 总体设计技术
IKAROS主要由结构、热控、通信、天线与能源、数据处理、姿态控制和推进等子系统组成,其主要指标见表3。
其结构子系统的主体形状为圆柱体(直径1.6m,高0.8m),如图3所示,展开后的太阳帆薄膜形状为四方形(边长14m,厚度7.5μm),如图4所示。

表3 IKAROS航天器主要指标Table 3 IKAROS spacecraft specification

图3 IKAROS结构总装状态Fig.3 IKAROS flight model in final assembly phase

图4 IKAROS太阳帆展开状态Fig.4 Deployment state of IKAROS solar sail
太阳帆展开结构中只有约80%的面积用于太阳帆的光压推动,其余面积则分布着薄膜太阳电池、液晶器件和尘埃粒子计数器,其中薄膜太阳电池为太阳帆姿态控制和通信系统提供能源,液晶器件也通过对太阳光的反射率和透射率的变化实现姿态控制,尘埃粒子计数器则利用压电元件制成。太阳帆不同模块之间则通过支架连接,而太阳帆和主体结构之间则通过系链连接,在太阳帆的4个顶端则分布着质量为0.5kg的顶端物,用于支持薄膜的展开,如图5所示,薄膜的四分之一形状如图6所示。

图5 IKAROS太阳帆模块分布图Fig.5 IKAROS solar sail and devices on the sail

图6 IKAROS太阳帆四分之一膜片的正面和背面Fig.6 Front and back of trapezoid petal of IKAROS solar sail
3.2.2 材料设计技术
IKAROS太阳帆主要材料为厚度约7.5μm 的聚酰亚胺薄膜,在表面一侧沉积厚度约为80nm 的铝膜。然而,聚酰亚胺材料由于其制备工艺的不同,其力学性能相差较大。因此,针对太阳帆的不同部位,选用的材料也不相同。尤其是受力较大的位置,薄膜材料经过增强处理以防止撕裂。
IKAROS太阳帆选用两种不同的聚酰亚胺薄膜,其性能指标见表4,两种不同聚酰亚胺材料在太阳帆上的应用如图7所示。
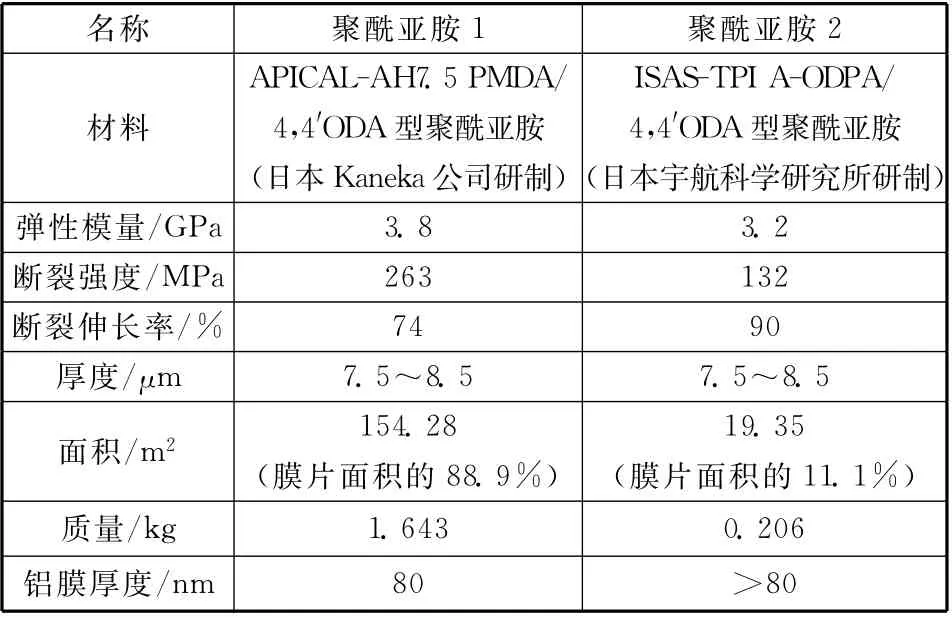
表4 两种不同的聚酰亚胺材料性能比较Table 4 Properties comparison between two different polyimide materials
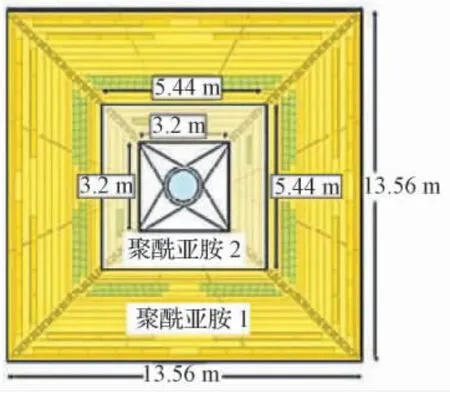
图7 两种不同聚酰亚胺在太阳帆上的应用分布图Fig.7 Distribution of two kinds of polyimide on solar sail
3.2.3 展开技术
IKAROS太阳帆的在轨展开与美国的设计概念不同,它利用自旋产生的离心力引导薄膜结构的展开(见图8)。在从发射器分离后,其最初自旋速度为5r/min,之后将速度降低到2r/min,然后抛出顶端物,准备第一阶段的准静态展开。抛出顶端物后,通过自旋加速装置,使其自旋速度加速到25r/min,激活制动器一,将控制薄膜压紧的装置打开,之后随着自旋速度的降低,利用离心力实现薄膜四角的完全展开。之后进一步激活制动器二,解除薄膜限制,开始薄膜的动态展开,随着自旋速度的进一步降低,展开薄膜的振动减小,直到完全展开为止。

图8 IKAROS太阳帆展开过程示意图Fig.8 Solar sail deployment sequence
3.2.4 姿态控制技术
IKAROS太阳帆巧妙地利用在其上对称分布的液晶器件,实现太阳帆姿态的控制,其原理如图9。当液晶器件电源开时,液晶器件将对入射太阳光进行镜面反射,当液晶器件电源关时,液晶器件将对入射光进行漫反射,假设单位面积的镜面反射光压为F1,单位面积的漫反射光压为F2,则有F2<F1,从而实现在太阳帆的不同位置存在不同的光压,进而实现以太阳帆中心为支点存在一扭矩。通过控制太阳帆不同位置的液晶器件电源状态,可实现太阳帆的姿态调控,以使其按照设计的路线飞行。

图9 利用反射控制器件进行姿态控制原理图Fig.9 Attitude control by using reflector
4 我国大型轻质展开结构的研究方向
太阳帆可望成为未来空间探测的重要驱动技术,尤其是IKAROS成功实现了世界首次太阳帆空间展开和飞行,对我国未来大型展开结构的研制和应用具有重要的借鉴意义。
为此,可从以下几个方面深入研究。
1)总体设计技术
利用薄膜材料制备大型展开结构的核心技术之一为总体设计技术,这是由于展开结构本身只是实现其功能的一部分,如展开式薄膜太阳电池阵的展开结构只是作为支撑部分。此外,大型展开结构还需结合能源、通信、性能监测、姿态控制等子系统。这些子系统都是大型展开结构航天器所不可或缺的部分,因此,如何将这些子系统与大型展开结构合理地整合到一起,是航天器的总体设计工作。以太阳帆为例,纳帆与IKAROS就存在较大的差别(见图3和图10),这些差别包括能源的布局、各项功能子系统的分布等。
2)材料制备与加工技术
材料的制备与加工技术是大型轻质展开结构的基础,包括材料的制备技术和材料的加工技术两个方面。从材料制备技术角度分析,如何制备出质量轻、面积大的材料,同时又要具备一定的功能,如太阳帆薄膜的高反射率和较好的力学性能是材料研发的根本目标;从材料的加工技术分析,则包括加工材料的形状,把一定功能、不同单元材料有机地构造在一起等。

图10 纳帆主体结构图Fig.10 Structure of Nano-sail
3)展开技术
大型轻质展开结构的展开技术是航天器实现在轨性能的前提。目前已知的展开方式有充气展开(类刚性)、机械展开(刚性)和自旋展开(柔性)几种方式,刚性展开见图4。如果是利用骨架或柔性骨架实现几个方向的直接延伸,则设计上相对简单,但同时所占用的面积也较大;如果利用自旋离心力展开,则可以大大缩小航天器的收缩面积和体积,但对展开的技术要求较高。因此,如何根据航天器的轨道、展开结构的用途等选择合适的展开技术是非常重要的。例如,自旋型较之刚性型可达到膜片式的质量/面积比,但是其在姿态控制上也有一些缺点。首先,由于膜片的柔性使姿态调控变得复杂,传统的推进扭矩将会引起膜片的扰动;其次,在姿态控制时的燃料消耗也要求自旋型需要控制较大的角动量。从另一方面,自旋型的姿态控制相对安全,其分析见表5。
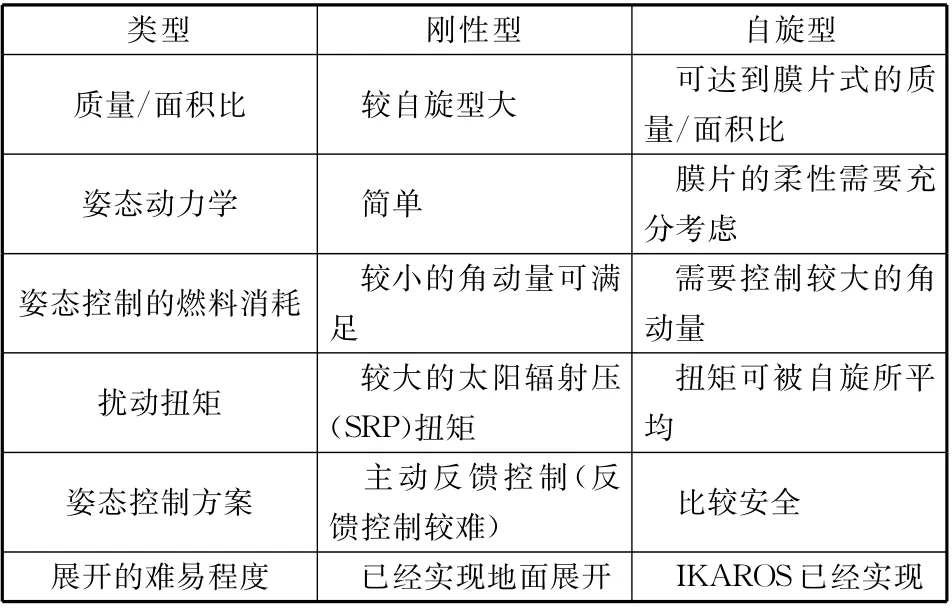
表5 刚性型和自旋型展开方式比较Table 5 Comparison between rigid and spinning deployment
4)姿态控制技术
大型展开结构航天器在轨运行过程中,随着轨道的变化和相对太阳位置和倾角的变化,为实现一定的功能,如轨道或电源获取,需要对姿态进行控制。若太阳帆采用IKAROS模式,则可以通过采用液晶器件实现不同位置光压的变化,若采用宇宙1号叶片式太阳帆,则可以通过控制其中某一个或几个叶片相对太阳角度的变化,实现相对中心力矩的变化而控制姿态。因此,姿态控制技术与大型轻质展开结构的总体设计是密切相关的。
5)能源供给技术
能源是实现通信、姿态控制、性能监测等的动力来源。对不同用途的大面积轻质展开结构,可能需要采用一种或几种电源技术。以IKAROS太阳帆为例,不但在太阳帆表面分布了部分薄膜太阳电池,在中心主体结构的顶端也排布了大量的太阳能电池,以满足航天器在轨运行的需要。同样,如何实现能源分的收集与分配也是能源供给技术的重要内容。
6)空间环境适应性技术
大型轻质展开结构在轨运行过程中,其材料和器件将面对严酷的空间环境,如太阳电磁辐射、带电粒子辐射、高低温等,这将导致材料与器件的光学、电学和力学等性能发生变化甚至失效,造成航天器在轨故障或缩短寿命。如深空探测用大型轻质展开结构,就要面临较之地球轨道更加严酷的高低温环境。因此,大型轻质展开结构航天器的空间环境适应性技术也是需要重点关注的内容之一。
7)地面模拟试验验证技术
在大型轻质展开结构航天器研制的过程中,针对展开结构在地面研制及发射过程各个环境的特点,需要开展展开结构的地面存贮、延长、解压、振动、展开等各项功能试验。
对航天器的初样和正样,则通常需要开展热真空试验和振动试验等。尤其是针对大型轻质展开结构,对其地面模拟试验和验证试验提出了新的技术要求。
5 结束语
太阳帆航天器技术是一个多学科交叉的综合技术,是未来的重要发展方向。应该在进一步加强航天器材料与器件的制备与加工技术、航天器地面模拟试验验证技术及航天器总体设计技术研究的基础上,尽快系统开展以太阳帆为代表的大型轻质展开结构研制与应用。
随着我国航天技术的发展和深空探测的逐步推进,大型轻质展开结构将受到越来越高的重视和应用。IKAROS太阳帆的在轨成功展开和飞行给我们提供了大型轻质展开结构空间应用的示范,其设计技术和在轨运行控制技术将对我国未来轻型展开结构的设计具有借鉴意义。
(References)
[1]Fay Catharine C,Stoakley Diane M,Clair Anne K St.Molecularly oriented films for space applications[J].High Perform Polym,1999(11):145-156
[2]Darooka D K ,Jensen D W.Advanced space structure concepts and their development[C]//42ndAIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics,and Materials Conference and Exhibit.Washington:AIAA,2001:1257
[3]Furuya Hiroshi,Nakahara Makiko,Murata Satoshi,et al.Concept of inflatable tensegrity for large space structures[C]//47th AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics,and Materials Conference.Washington:AIAA,2006:1700
[4]Tsuda Y,Mori O,Funase R,et al.Flight status of IKAROS deep space solar sail demonstrator[J].Acta Astronautica,2011,69(5/6):833-840
[5]Mori Osamu,Sawada Hirotaka,Funase Ryu,et al.First solar power sail demonstration by IKAROS,transactions of the Japanese society for artificial intelligence[J].Aerospace Technology Japan,2011,27(8):425-431
[6]Johnson Les,Whorton Mark,Heaton Andy,et al.Nano Sail-D:A solar sail demonstration mission[J].Acta Astronautica,2011,68(5/6):571-575
[7]Johnson Les,Young Roy,Montgomery Edward,et al.Status of solar sail technology within NASA[C]//Proceedings of Second International Symposium on Solar Sailing.New York,USA:New York City Colleage of Technology,City University of New York,2010:27-34
[8]Dachwald Bernd,GmbH Kayser-Threde.International symposium on solar sailing(ISSS 2007)[C/OL].(2007-06-27)[2012-01-10].http://www.isss.spacesailing.net/
[9]Kezerashvili Roman Ya.The second international symposium on solar sailing(ISSS 2010))[C/OL].].(2010-07-20)[2012-01-20].http://www.citytech.cuny.edu/ISSS2010/