基于Simulink的双闭环直流调速系统设计
2012-01-04陶冠男
陶冠男
(沈阳大学 信息工程学院,辽宁 沈阳 110044)
基于Simulink的双闭环直流调速系统设计
陶冠男
(沈阳大学 信息工程学院,辽宁 沈阳 110044)
研究了双闭环直流调速系统的结构.根据系统结构,按照由内到外的顺序分别设计电流调节器和转速调节器.为使系统无静差,两个调节器均选为PI调节器.在用Simulink仿真的过程中,对调节器参数进行了整定,使系统达到稳定状态.通过仿真曲线,说明了设计的合理性.
双闭环直流调速;PI调节器;参数整定;Simulink
直流调速系统调速范围广、静差率小、稳定性好以及具有良好的动态性能,在高性能的拖动技术领域中,相当长时期内几乎都采用直流电力拖动系统.现在直流调速理论发展得比较成熟,但要真正设计好一个双闭环调速系统并应用于工程设计却有一定的难度[1].
本文基于Simulink对双闭环直流调速系统进行设计与仿真,合理选择电流调节器和转速调节器的结构,调整调节器的参数,使系统达到设计要求,对电流、转速调节器的参数进行了整定.在文献[2-4]中,只是通过仿真曲线对系统的稳定性进行分析,而本设计是在参数整定的基础上得到仿真曲线,并列出多组数据进行说明.
1 系统设计
根据设计多环控制系统的一般原则进行系统设计:从内环开始 ,一环一环地逐步向外扩展.先从电流环入手,首先设计好电流调节器,然后把整个电流环看做转速调节系统的一个环节,再设计转速调节器[2].
稳态指标的要求:系统无静差.动态指标的要求:空载启动到额定转速时的转速超调量σn≤10%,电流超调量σi≤5%.
2 双闭环直流调速系统的结构
带有电流、转速反馈的双闭环调速系统实属多闭环系统,一般采用由内到外一环包一环的形式,内环为电流环,设有电流调节器ACR,外环为转速环,设有转速调节器ASR,构成一个完整的闭环系统[5].电流环接受速度环的输出作为控制目标,调节电动机的电流以满足既能控制电动机以较快的速度跟踪参考速度,又不至于产生过流现象损坏电动机,这种结构为工程设计以及调试工作带来相当大的方便.双闭环直流调速系统结构图如图1所示.图1中,给定电压U*n=10 V,晶闸管放大系数Ks=40,晶闸管失控时间Ts=0.001 7 s,电枢回路总电阻R=0.5Ω,电磁时间常数Tl=0.03 s,机电时间常数Tm=0.18 s,电动势常数Ce=0.132 V·min/r,转速反馈系数α=0.007 V·r/min, 电 流 反 馈 系 数β=0.083 V·r/min.
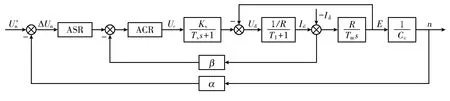
图1 双闭环直流调速系统结构图Fig.1 Structure of double-loop direct current control system
3 调节器设计
3.1 电流调节器ACR的设计
(1)电流环的设计原理.由于电流环的重要作用是保持电枢电流在动态过程中不超过允许值,因而在突加给定时,不希望有超调,或者超调越小越好[6].反电势对电流环来说,只是一个变化缓慢的扰动,在电流调节器的快速调节过程中,可以认为E基本不变,可以不考虑反电势变化的影响,而将电势反馈作用断开,使电流环结构得以简化.
(2)电流调节器ACR的结构选择.为了使系统稳态上做到无静差以获得理想的堵转特性,动态上保持电动机电枢电流不超调,保证系统的跟随性,因此选择PI调节器,既满足了动态要求,又消除了静态误差.结构设计如下:
(3)电流调节器ACR的参数整定.固定转速环参数,调整电流环内部参数,通过多次实验,得出电流调节器最合适的参数,即Kpi=0.8,τi=0.027 5,σi=4.2%,满足要求.如表1和表2所示.

表1 固定参数τi=0.027 5,调整Kpi的值Table 1_Adjusting the value of Kpi,whenτi= 0 . 0 2 7 5

表2 固定参数Kpi=0.8,调整τi的值Table 2_Adjusting the value ofτi,when Kpi=0.8
3.2 转速调节器ASR的设计
(1)转速环的设计原理.转速调节器是调速系统的主导调节器,转速环的目的是为了控制电动机的转速,它使转速n很快地跟随给定电压变化.
(2)转速调节器ASR的结构选择.为达到稳态时减小转速误差,采用PI调节器,则可实现无静差.采用PI调节器的双闭环调速系统的转速响应必然有超调.ASR的结构设计与ACR的结构设计相同,即
(3)转速调节器ASR的参数整定.固定电流调节器参数Kpi=0.8,τi=0.027 5,调整转速调节器参数Kpn,τn的值.通过多次实验,固定其中一个参数调节另一个参数,得到的数据如表3和表4所示.通过比较,得Kpn=6.7,τn=0.087时,σn=9.3%为最合适值.

表3 固定参数τn=0.087,调整Kpn的值Table 3 Adjusting the value of Kpn,whenτn=0.087

表4 固定参数Kpn=11.7,调整τn的值Table 4 Adjusting the value ofτn,when Kpn =11.7
综上所述以及从各数据分析,得出结论:当电流调节器参数Kpi=0.8,τi=0.027 5,转速调节器参数 Kpn=6.7,τn=0.087时,σi=4.2%<5%,σn=9.3%<10%.因此,可以找到合适的参数使系统达到设计要求.
4 仿真结果
利用MATLAB下的Simulink软件进行系统仿真,在仿真模型中,调整PI调节器的参数,得到超调量和动态响应都达到要求的仿真曲线.
(1)选择最合适的参数,即电流调节器参数Kpi=0.8,τi=0.027 5,转速调节器参数 Kpn=6.7,τn=0.087时,得到最后的系统仿真模型如图2所示.
(2)仿真曲线.转速仿真曲线如图3所示,电流仿真曲线如图4所示.
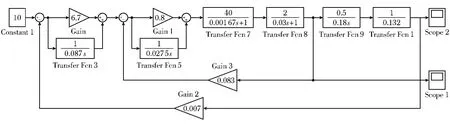
图2 系统仿真模型Fig.2 System simulation model
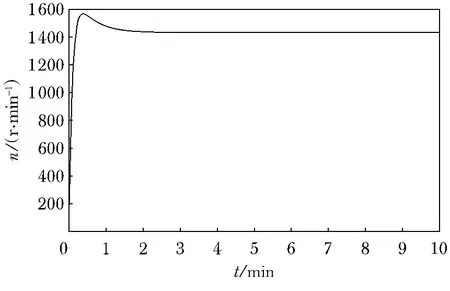
图3 转速仿真曲线Fig.3 Simulation curve of speed
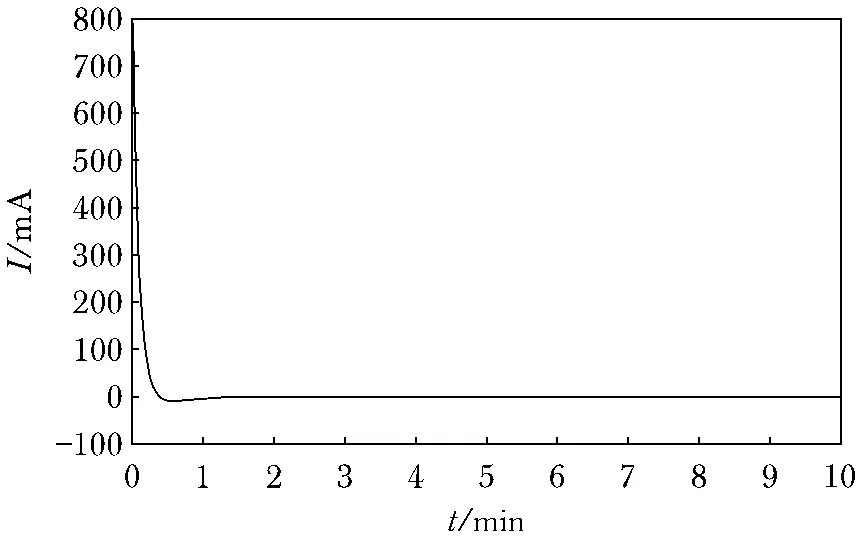
图4 电流仿真曲线Fig.4 Simulation curve of current
(3)仿真结果分析.对于带有电流、转速双闭环系统的设计,利用Simulink的仿真,经过多次实验调整电流调节器、转速调节器的参数,找到一组合适的数值,即电流调节器参数Kpi=0.8,τi=0.027 5,转速调节器参数Kpn=6.7,τn=0.087时,使得转速超调量σn≤10%,电流超调量σi≤5%,达到设计要求.
5 结 语
对转速、电流双闭环调速系统,基于快、准、稳的系统设计原则,设计电流环、转速环,以实现系统的串级控制,最后利用Simulink进行系统仿真.经过多次实验得出,在调节ACR和ASR的参数过程中,发现单独调节ACR的参数时并不能使系统达到要求,只有两个调节器共同调节,才能使系统达到设计要求.
[1] 王果,朱大鹏.直流电机双闭环调速系统的工程设计方法仿真[J].电机技术,2005(3):23-25.
[2] 姚建红,戴琳,厉立国.基于 Matlab/Simulink的双闭环直流调速系统的设计[J].佳木斯大学学报:自然科学版,2006,24(4):521-523.
[3] 刘德志.直流电机双闭环调速系统仿真[J].装备制造技术,2010(8):27-29.
[4] 王祖亮,侯北平.基于Simulink的双闭环调速系统仿真研究[J].浙江科技学院学报,2009,21(1):7-9.
[5] 黄忠霖.控制系统 MATLAB计算及仿真[M].北京:国防工业出版社,2006:275-284.
[6] 薛定宇.控制系统仿真与计算机辅助设计[M].北京:机械工业出版社,2005:145-155.
Design of Double-loop Direct Current Control System based on Simulink
TAOGuannan
(School of Information Engineering,Shenyang University,Shenyang 110044,China)
The structure of double closed-loop DC motor control system was studied.According to the system structure,the current regulator and the speed regulator were designed in accordance with the order from the inside to the outside.To make the system has no static error,PI regulator was chosen.In the course of the simulation based on Simulink,the controller parameters were tuned to make the system steady.The rationality of the design was shown through the simulation curve.
double closed-loop DC motor;PI regulator;parameter tuning;Simulink
TM 33
A
1008-9225(2012)01-0035-03
2011-05-30
陶冠男(1987-),女,辽宁鞍山人,沈阳大学硕士研究生.
刘乃义】
