基于软闭环控制的寄生式超声自动检测方法*
2012-01-04王玉国张书增童林军张晨盺
王玉国,张书增,童林军,张晨盺
(1.南京工程学院 车辆工程系,江苏 南京211167;2.中南大学 CAD/CAM研究所,湖南长沙410075)
无损检测技术在不损伤被检物使用性能与形状的条件下可判断被检物的状况,是现代工业许多领域中保证产品质量与性能、稳定生产工艺的重要手段[1-2]。超声检测作为无损检测的一个分支,具有适应性强、检测灵敏度高、成本低、污染少、对人体无害等优点,广泛应用于材料的内部缺陷检测[3]。超声检测可分为手动检测和自动检测2种方式,手动检测具有操作方便,检测成本低等优势,但存在检测效率低、缺陷难以精确定位和定量、且易受操作员个体差异的影响造成检测标准不统一,进而影响到超声检测的稳定性与可靠性[4],与手动检测相比,自动检测的优点显而易见。目前大多采用建构多自由度的专用检测试验台以实现工件的超声自动检测[5],因此,存在开发周期长,成本高等不足。在该背景下本文提出了一种寄生式超声自动检测方法,并成功开发了一套基于多轴联动数控机床的超声C扫描检测系统。
1 研究思路
本文所研究的寄生式超声自动检测系统如图1所示:采用汉川4轴XK714B型数控铣床作为寄生式系统的运动控制平台,将探头架安装在机床的刀具装夹位置,通过串口通讯实现数控机床的计算机控制;根据被测工件的CAD模型与扫描步距自动生成探头运动路径,得到控制探头运动的各行数控G代码;在实时超声检测中,探头采集超声A波信号经超声卡传入工控机,通过信号预处理后再提取缺陷的特征值,然后对缺陷进行超声C扫描图像,实时检测完成后再对C扫描图像处理;最后,对缺陷进行定量、定位分析。
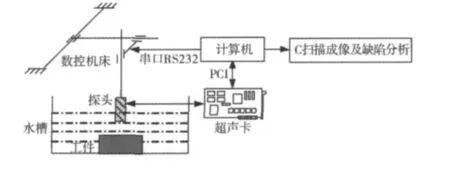
图1 寄生式超声自动检测系统的示意图Fig.1 Parasitic system Schema of automatic ultrasonic inspection
由于计算机对数控机床实施的开环控制[6],不能实时反馈探头的当前位置,难以保证所采集超声信号来自精确的目标位置,因此,如何解决信号采集与运动控制的同步是实现寄生式超声检测系统的关键。本文针对该关键科学问题采用如下的研究线路:首先根据超声A波信号的特征值探求测量点与探头之间的位置联系,接着进行大量超声采集实验,获取数控机床在不同速度、行程条件下经过测量的时耗参数;在此基础上,利用B样条曲面生成方法对数控机床的运动特性进行分析并构建其运动特性模型,从而实现数控机床的软闭环控制。软闭环控制是指在硬件条件下无法完成闭环控制的前提下,通过软件方法实现硬件闭环控制条件下所具备的位置反馈功能。
2 运动及采集同步实验的设计
超声A波数据用数学表示为w(n)={h(i)|i=1,2,···,n},其中 n代表采样点的总数,h(i)表示第i个采样点的幅值[7]。图2(a)所示为一组超声A波数据。如图2(b)所示,当探头产生的始发波T遇到试块边缘时,有一部分声波能量被反射回来并形成1个波形S;当声波反射点更靠近试块边缘时,被发射的声波能量就越小,如图2(c)所示。
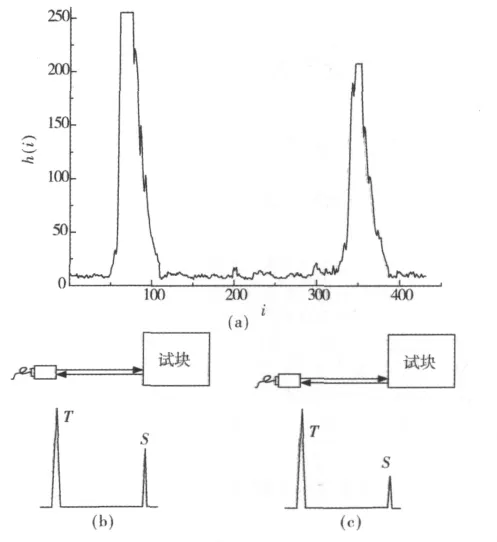
图2 超声A波数据及回波原理Fig.2 Ultrasonic A -wave data and its echo principle
设计如图3所示的槽型试块,将超声探头置于试块边缘C点的上端,采集其回波的能量特征值E0。给定的行程L下让探头以速度v从A点向E点运动,其中探头会经历“响应时滞—加速—匀速—减速—停止”的运动过程。为描述数控机床的运动特性,在采集软件程序中设定计时器,每隔0.01 s采集回波信号的能量特征值并与E0比较,当到达最佳匹配时记时终止,并输出机床运动时间t。基于以上原理进行运动及采集同步实验数据的采集:在固定的行程条件下,某一速度下时耗随位移变化的一组数据表示为qi(i=0,1,…,m),在各种不同速度时所采集的若干组数据表示为qi,j(i=0,1,…,n;j=0,1,…,m)。运动及同步试验在250 mm行程下采集得到的实验数据如图4所示。
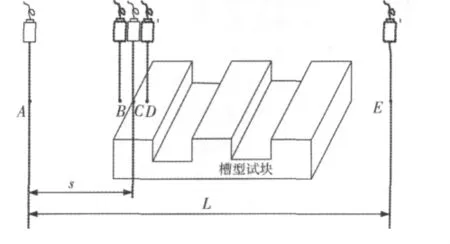
图3 运动及采集同步实验的原理图Fig.3 Illustrative diagram of synchronous experiment on movement and acquisition
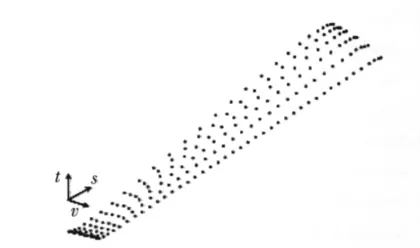
图4 同步实验数据实例(L=250 mm)Fig.4 An instance of synchronous experiment data(L=250 mm)
3 机床运动特性的建模
利用重构一张B样条曲面插值或逼近于运动采集同步实验数据点[8]。上述的多组数据通过插值反算得到的曲线方程可表示为[9]:


根据行程对数控机床的运动特性进行分析,图5为采用上述方法对图4数据进行曲面重构所得到的曲面控制网格,这便是本文所研究的汉川XK714B数控机床在行程250 mm条件下的运动特性模型,同理可获得其他行程下的运动特性模型。

图5 数控机床的运动特性模型(L=250 mm)Fig.5 Kinetic characteristic model of NC machine(L=250 mm)
在寄生式超声自动检测过程中,可根据规划后各路径的长度、探头运动速度、扫描步距及数控机床的运动特性模型,反求出探头到达各检测点的准确时间[11],实现寄生式超声自动检测系统的软闭环控制,以便精确采集超声信号保证检测的精度和可靠性。
4 实验及分析
采用美国GE公司生产的点聚焦直探头(频率5M,晶片直径1',聚焦长度14.2',型号为H10MP15)、上海思雀柯信息科技有限公司生产的UT-2001型超声卡为主要元件构建了如图6所示的寄生式超声检测系统,采用上述软闭环方法对其进行运动控制。为验证该系统的精度,并采用普通的1元硬币进行超声C扫描成像,扫描区域位置为20 mm×20 mm,扫描步距为0.03 mm,扫描速度设置为5 mm/s,C扫描图像如图7所示。
图6 寄生式超声检测系统Fig.6 Parasitic system of automatic ultrasonic inspection

图7 C扫描成像实例Fig.7 An instance of C -scan imaging
从C扫描图像的清晰轮廓可见本文所提出的寄生式超声自动检测方法的可行性,该系统足可应用于探伤灵敏度不高于0.1 mm的超声自动检测;本文所构建的软闭环控制模型能在硬件条件无法完成闭环控制时,通过软件方法实现硬件闭环控制条件下所具备的位置反馈功能。同时,该方案可扩展至五轴联动的加工中心,以实现复杂型面构件的超声自动检测。
5 结论
(1)提出了基于数控机床的寄生式超声自动检测模型,与目前普遍的专用超声检测方法相比,具有开发周期短、投入成本低等优势。
(2)采用运动及采集实验获取数控机床的时耗数据,根据 B样条曲面造型建立其运动特性模型,从而实现寄生式超声自动检测系统的软闭环控制。
(3)通过硬币的C扫描图像验证了寄生式超声自动检测系统的有效性,并分析了寄生式超声自动检测方法的可扩展性。
[1] Hsu D K.Nondestructive evaluation of sandwich structures:A review of some inspection techniques[J].Journal of Sandwich Structures& Materials,2009,11(4):275-291.
[2]耿荣生.新千年的无损检测技术一从罗马会议看无损检测技术的发展方向[J].无损检测,2001,23(l):2-5.DI Rong-sheng.DNT technology in the new millennium -from the Rome meeting to see the development direction of nondestructive technology[J].Non - Destructive Testing,2001,23(1):2 -5.
[3]罗雄彪,陈铁群.超声无损检测的发展趋势[J].无损检测,2005,27(3):148 -152.LUO Xiong-biao,Chen Tie-qun.Development trends of ultrasonic testing[J].Non - Destructive Testing,2005,27(3):148-152.
[4]Haase W,Maurer A.Latest developments on industrial ultrasonic testing of aircraft components[C]//Proceedings of the World Conference on Non - Destructive Testing,2004.
[5]Rutten J.Multi aix automated ultrasonic inspection systems for new AIRBUS A380 composite glare panels[C]//Proceedings of Aerospace Testing Hamburg,2004.
[6]Fitzpatrick M.CNC技术[M].唐庆菊,张文生,卜迟武,等,译.北京:科学出版社,2009:105 -122.Michael Fitzpatrick.CNC Technology[M].TANG Qingju,ZHANG Wen-sheng,BU Chi-wu,et al.translation.Beijing:Science Press,2009:105 -122.
[7]李雄兵.曲面工件自动超声检测中若干关键问题的研究[D].杭州:浙江大学,2008.LI Xiong-bing.Research on automated ultrasonic non -destructive inspection for the complex surface[D].Hangzhou:Zhejiang University,2008.
[8]张海林,金小刚,冯结青.三次B样条曲线骨架卷积曲面造型[J].计算机辅助设计与图形学学报,2006,18(9):1300-1355.ZHANG Hai-lin,JIN Xiao-gang,Feng Jie-qing.Convolution surface modeling for cubic B - spline skeletons[J].Journal of Computer-Aided Design&Computer Graphics.2006,18(9):1300 -1355.
[9]Milroy M J,Bradley C,Vickers G W,et al,G1 continuity of B - spline surface patches in reverse engineering[J].Computer-Aided Design,1995,27(6):471-478.
[10]施法中.计算机辅助几何设计与非均匀有理B样条[M].北京:北京航空航天大学出版社,2001.SHI Fa-zhong.CAGD & NURBS[M].Beijing:Beijing University of Aeronautics and Astronautics Press,2001.
[11]胡 俊,王宇哈,李 眸,等.基于曲线外插技术的曲面测量等弧长采样方法[J].机械科学与技术,2004,23(3):273-277.HU Jun,WANG Yu-ha,LI Mou,et al.Equal arc - length sampling fbr measuring free-form surface based on curve extrapolation[J].Mechanical Science and Technology,2004,23(3):273 -277.
