基于相位一致性的遥感影像道路特征检测方法
2011-12-28韦春桃李彩露杨先武
韦春桃,李彩露,杨先武,吴 平
(1.桂林理工大学土木与建筑工程学院,广西桂林 541004;2.信阳师范学院城市与环境科学学院,河南信阳 464002)
基于相位一致性的遥感影像道路特征检测方法
韦春桃1,李彩露1,杨先武2,吴 平1
(1.桂林理工大学土木与建筑工程学院,广西桂林 541004;2.信阳师范学院城市与环境科学学院,河南信阳 464002)
在空间域中进行道路特征检测容易受图像亮度、对比度和噪声的影响,为了克服这一缺点,该文采用在频率域中进行道路特征检测。基于频率域的相位一致性道路特征检测方法具有亮度和对比度不变性,特征在频率域中表现出最大的相位一致性,通过计算影像6个方向的相位一致性值得到相位一致性值之和的灰度图,对灰度图进行二值化,然后使用数学形态学方法进行细化,去除噪声,检测出道路特征。实验表明,该方法对对比度、亮度变化不敏感,能够精确地检测出与人眼视觉相一致的道路特征。
遥感影像;相位一致性;数学形态学;道路;特征检测
道路特征是遥感影像中的主要信息,道路特征检测技术对GIS数据更新、目标检测和识别、影像匹配都有重要意义,国内外许多学者对道路检测技术进行了研究。道路检测技术主要有两种方法[1]:一种是基于区域的方法,通过获取区域上的一点然后根据区域生长等方法合并成一个道路区域,或直接通过区域分割得到道路区域;另一种是基于边缘的方法,即先检测道路边线然后根据一定的方法恢复道路的轮廓。每种方法通过不同的检测手段(Hough变换、模板匹配、神经网络等)获取道路轮廓[2],由于后者简单实用并能够较快地处理图像,为道路特征检测的首选方法。常用的边缘检测方法主要有Canny算子、Log算子、Hough变换等方法,这几种方法主要在图像空间域中根据图像的灰度或梯度特征检测图像的边缘,易受图像亮度、对比度、噪声的影响,由于道路特征可用线特征描述,特征在频率域中表现出最大的相位一致性,根据特征在频率域中的这种特性以及相位一致性对亮度和对比度具有不变性的特点,本文使用相位一致性方法进行道路特征检测,计算各像素6个方向上的相位一致性值,然后求取相位一致性值之和并对其进行二值化,最后结合数学形态学进行道路特征检测。
1 道路检测理论基础
在低分辨率遥感影像中,道路主要呈现为线特征,道路交叉口主要呈现点特征,因此在低分辨率遥感影像上可以用线特征和点特征对道路进行描述。在中高等分辨率遥感影像上,道路呈现为一系列局部灰度相似、有一定宽度的狭长区域,边界主要由两条边缘线组成,因此也可用线特征对道路进行描述。
1.1 相位一致性检测特征原理
Morrone等[3]提出了一种基于频率域的检测方法,通过在频率域中分析方波和三角波的特性发现,边缘经常出现在傅里叶分量相位最一致的地方,于1987年提出了相位一致性(Phase Congruency)的概念和计算方法,将傅里叶分量相位最一致的点作为特征点,相位一致性的度量(无量纲)不受图像亮度和对比度的影响。Kovesi对相位一致性进行了改进[4,5],使其能够用于自然图像的特征检测。相位一致性检测特征的原理与人类视觉系统对图像特征的认知一致[3]。
相位一致性检测特征以方波和三角波为例(图1、图2),方波的傅里叶分量(取展开式的前4项)均为正弦波,在边缘点各正弦分量相位相同,为0°或180°,取决于是上升沿还是下降沿,该点处相位一致程度最高,而在方波的其它点的单个相位值都在变化,使得相位一致的程度变低。三角波的傅里叶分量都是余弦波,三角方波顶点处的相位一致程度最高。因此,用相位一致检测特征只需简单地寻找谐波分量叠合最大相位处就可找到特征。
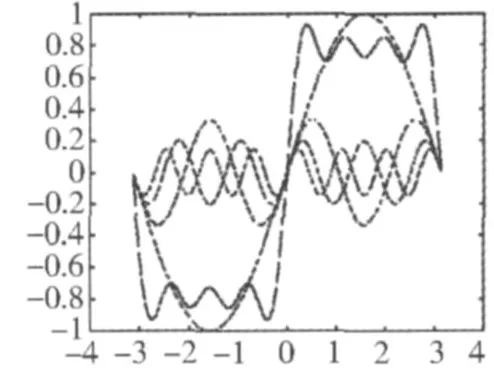
图1 方波的Fourier分量Fig.1 Fourier component of square wave
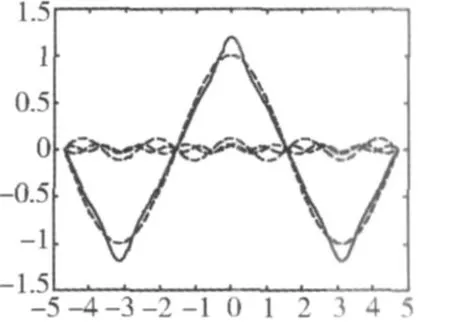
图2 三角波的Fourier分量Fig.2 Fourier component of triangle wave
对于一维信号I(x),其傅里叶级数展开式为:

式中:An表示第n个余弦分量的振幅;ω是常数,通常等于2π;φn0是第n个余弦分量的相位偏移量;φn (x)表示在x位置傅立叶变换成分的局部相位。
Morrone等[3]定义了一维信号I(x)的相位一致性函数PC:

1.2 相位一致性与局部能量模型
相位一致性较难计算。Ow ens等[6]指出可以用局部能量函数中峰值所在的点代替相位一致性最大的点。对于一维信号I(x),局部能量定义为信号I(x)及其Hilbert变换H(x)的平方和的平方根:

Owens等[6]得到局部能量等于傅里叶变换各分量幅度之和与相位一致性的乘积:

相位一致性定义为:

求解最大相位一致性就转化为求局部能量函数峰值的问题。若所有Fourier分量都有一致的相位,则该比值为1;反之,该比值最小可以为0(实际计算时为了避免分母为0,在分母加一非常小的数ε)。可以看出,相位一致性度量的无量纲特性使相位一致性易于设置阈值。
1.3 数学形态学原理
数学形态学是建立在集合论基础上的一门学科,通过设计一套变换概念和算法,描述图像的基本特征和基本结构,主要用来简化图像。数学形态学的基本思想是通过使用一定的形态结构元素与图像中对应的几何形状进行分析识别,并剔除不相干的结构以达到图像分析和识别的目的[7]。结构元素中包含了图像的形状、大小及灰度或色度信息,结构元素的选择直接影响道路特征检测的效果,通过选择一定的结构元素达到识别道路的目的。
数学形态学由一组形态学代数算子组成,以膨胀、腐蚀为基础,在处理图像时可以根据需要,由这两种运算组成各种复杂的运算,如先腐蚀再膨胀组成开运算,先膨胀再腐蚀组成闭运算;也可以由开运算、闭运算以及原图组成各种复杂的运算,通过组合这些算子实现对图像形状、结构的分析和处理。数学形态学一般用来提取影像中的几何信息,对二值图像更为有效,对二值化后的图像轮廓提取效果较好,并可以通过不断的膨胀腐蚀以消除多余的“边刺”以达到细化和修剪道路的目的,根据数学形态学中关于4连通和8连通的定义,通过连通性控制二值化后图像中噪声的影响。
2 影像道路特征检测实验
由于Log-Gabo r小波函数能真实地反映自然图像的频率响应,本文滤波器选用Log-Gabo r小波函数,计算相位一致性值时需要对每个像素点进行滤波,计算量较大,所以滤波器方向不宜选用过多,结合影像上道路的分布特性,本文选择6个方向(0°,30°, 60°,90°,120°,150°)的Log-Gabor小波滤波器提取道路特征,方向可以选择大于(或小于)6个,实验表明滤波器的方向间隔为30°时即可得到平坦的频谱覆盖又能使用最少的方向数[8]。使用更多的方向数并不会明显改变结果的性能,方向过多计算量也将增大。在滤波器的尺度和频率选择上,选用4个频率尺度,其中最小尺度波长为3,尺度倍数为2.1,滤波器的方向角度标准差为1.5,频率扩散的阈值为0.4,噪声能量的阈值为2.0,用于计算频率扩散相位一致性的调和函数的收敛权值为10,选用Matlab语言编程实现。
本文选用QuickBird遥感影像和地面拍摄影像进行实验。第一幅为一乡村地区的遥感影像(图3a),大小为142×232,影像上主要分布有若干条乡村小道组成的一个道路网,道路呈不规则分布,道路宽度不同,道路边界较农田边界清晰。第二幅为一城市道路遥感影像(图3b),大小为298×394,影像上分布有若干条道路组成的道路网,道路边界清晰度不同,对比度和亮度也有所不同。
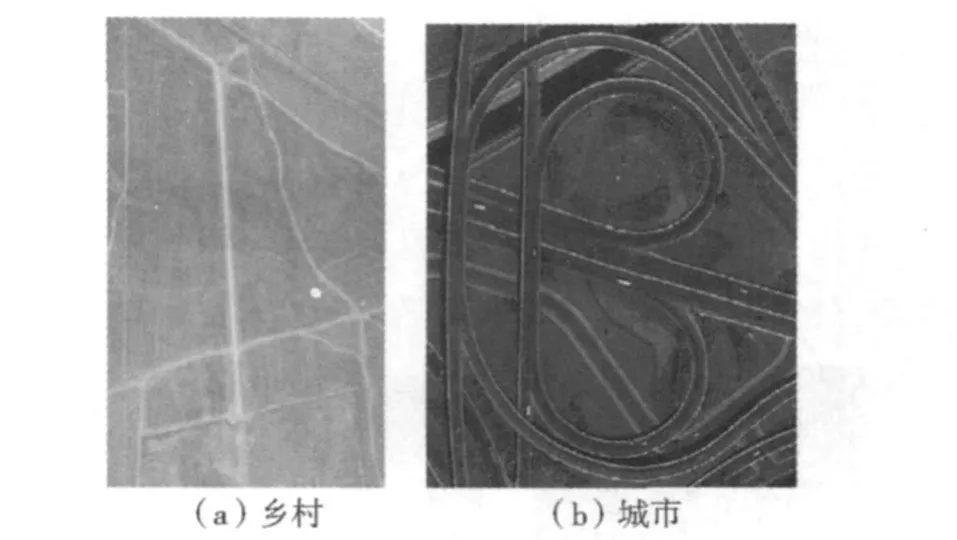
图3 原始影像Fig.3 The original images
2.1 相位一致检测特征
常用的边缘检测算子有 Prew itt算子、Sobel算子、Robert算子、拉普拉斯算子、Log算子和Canny算子,其中拉普拉斯算子对噪声比较敏感,一般不直接用于边缘检测,Log算子是高斯函数的拉普拉斯算子。其中 Prew itt算子、Sobel算子、Robert算子和Canny算子是一阶导数算子,拉普拉斯和Log算子是二阶导数算子,一阶导数边缘检测算子通过寻找图像梯度局部极大值来定位边缘,二阶导数边缘检测算子通过寻找二阶导数算子过零点来定位边缘。本文选用基于二阶导数的Log算子和基于一阶导数的Canny算子进行实验结果的分析比较。
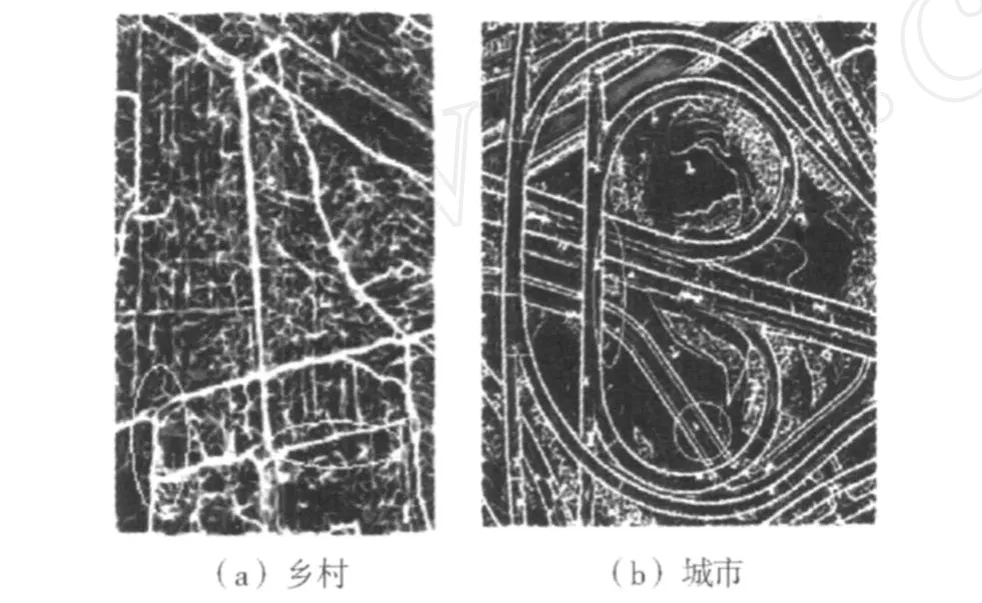
图4 相位一致性值之和Fig.4 The images for the sum of phase congruency value
对图3两幅原始影像进行处理,计算出影像上各像素6个方向的相位一致性值,然后将其相加得到相位一致性值之和,并输出其灰度图(图4)。图3中乡村道路不是单像素宽,是脉冲状边缘,其一阶导数有两个极大值,这样在使用一阶导数的方法进行边缘检测时会出现双边缘响应,对道路的检测效果影响较大,而乡村道路检测时一般检测道路的中心线。
图5为使用Canny算子检测得到的梯度图像。由图5a看出,当图像对比度和亮度不同时,Canny算子检测出的梯度响应会有很大的差别,椭圆区域的梯度较低,二值化时易受阈值的影响而检测不出道路,且Canny算子检测影像上的乡村道路时会出现双边缘响应,达不到理想的检测效果;从图5b看出,所标明的椭圆区域内的边缘响应比区域外暗很多,是由对比度不同造成的,而且图像中圆状区域内检测出的道路也出现双边缘响应,检测效果不满意。

图5 Canny算子梯度图像Fig.5 The Canny gradient image
图6为使用Log算子得到的梯度图像。从图6a可以看出,Log算子检测道路特征优于Canny算子,但标明的椭圆区域内也受图像亮度和对比度的影响,在二值化处理后更明显,左侧椭圆可以明显看出这一现象,Log算子是二阶导数算子,通过二阶导数过零点检测边缘;从图6b中所标明的椭圆区域可以看出,该区域由于对比度和亮度低于其他区域,所以产生的边缘响应较弱。从图4可以看出,对于人眼能够识别的边缘,相位一致性值之和输出的灰度图像上都能高亮显示出来,并与原图像视觉效果一致,图4a与图5a、图6a相比,图像所标明的椭圆区域可以产生相同的相位一致性响应值,证明相位一致性检测道路特征不受图像亮度、对比度的影响,较好地检测出了实验图像的所有边缘和细节,这有助于道路细节信息的提取,图4b与图5b、图6b中所标明的椭圆区域也验证了相位一致性不受图像对比度和亮度的影响。
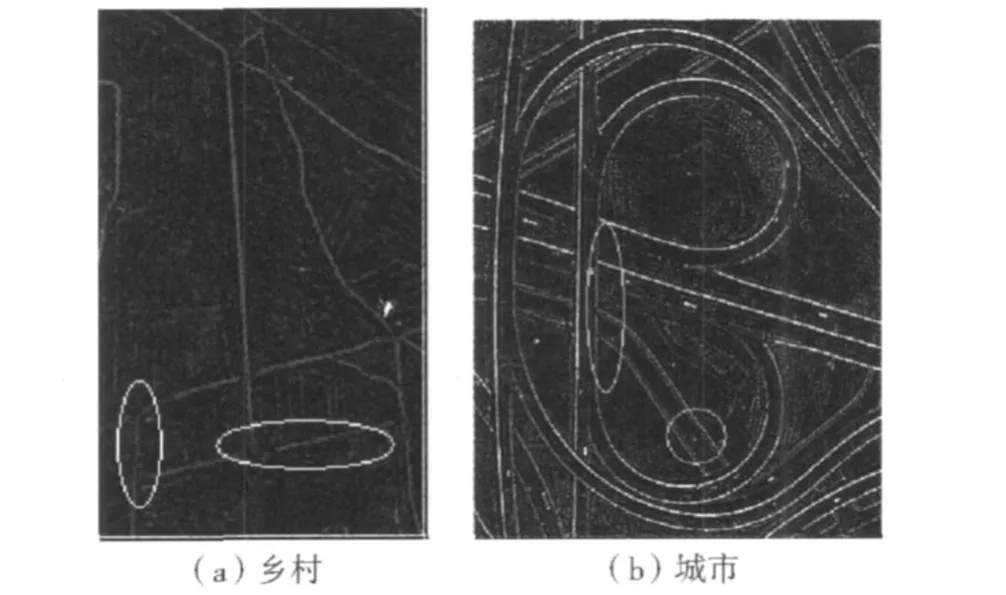
图6 Log算子梯度图像Fig.6 The Log gradient image
从以上几幅图像得到基于相位一致性的道路特征检测算法不受图像局部亮度和对比度的影响,即相位一致性有亮度和对比度不变性,并能够精确检测边缘特征,产生与人眼相符的单边缘响应,这在检测道路时更为明显。
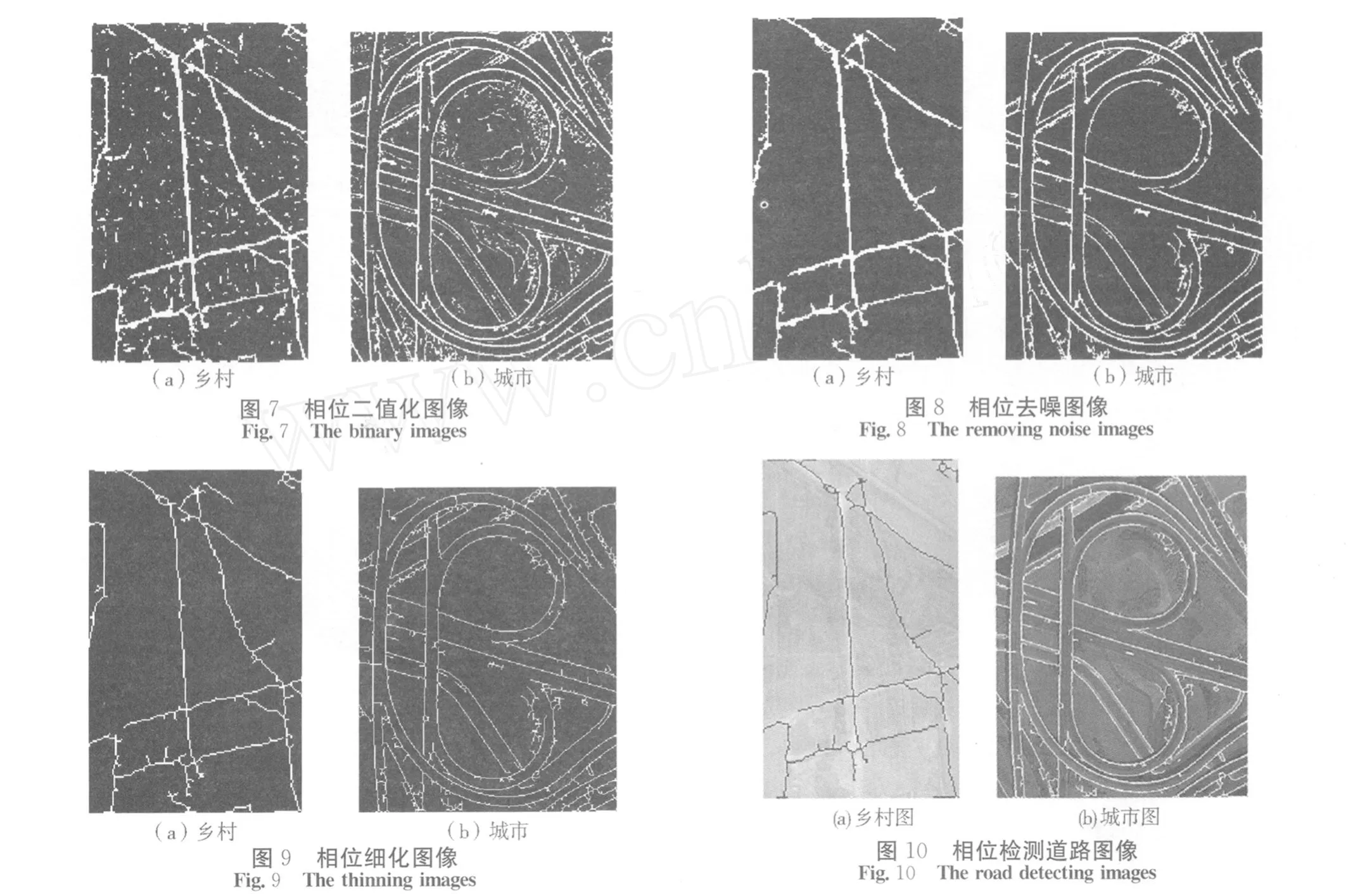
对相位一致性值之和的灰度图像进行二值化,设置二值化阈值,以保证既能检测出所有道路又不包含过多的噪声。当相位一致性值之和大于阈值时灰度设为1,小于阈值时灰度设为0。图3a二值化阈值选为0.9,即当6个方向的相位一致性值之和大于0.9则该像素处灰度值为1,反之为0,得到二值化图(图7a);图3b二值化阈值选为0.7,得到相位一致性二值化图(图7b)。从图7可知图像中存在很多点状噪声,根据像素的连通性将噪声点去除。
2.2 数学形态学检测道路特征
根据连通性,计算各独立分块的像素数目,设置一个独立分块像素数的阈值,用于去除小的独立分块噪声(图8),此处阈值设置为30(以去除多余噪声点又不去除道路边界为准)。去除噪声后图像道路轮廓比较明显,但有一定的宽度,为得到单像素的道路中心线,对图像进行细化处理,经过细化后道路的宽度为一个像素进而提取出道路骨架(图9),检测出道路特征后将其叠加到原图像上,图10是使用相位一致性检测出的道路特征效果,图10a中黑色线代表检测出的道路特征,道路定位比较准确;图10b中白色线代表检测出的道路特征,低对比度、低亮度的道路特征被检测出,并且定位准确。
2.3 实验分析
为了能够更好地说明相位一致性检测道路特征的优点,使用与相位一致性相同的思路用经典的线特征检测算子进行道路检测,分别选用基于一阶导数的Canny算子和基于二阶导数的Log算子。
图11a为使用Canny算子进行道路特征检测的结果,二值化梯度阈值选用25,该阈值既能够检测出道路特征又不会出现较多噪声;阈值若大于25,检测出的道路较完全但噪声也相应增加,阈值较小时检测出噪声减少但道路检测不完全,并且由于Canny算子产生双边缘响应进而检测出双边缘的杂乱道路边界。图11b二值化阈值为60,可以看出双边缘现象非常明显,图中椭圆标注区域未被检测出,将阈值改小可以减少双边缘的影响,但同样会有很多道路特征未被检测出。图12a是使用Log算子检测道路特征的效果,可以看出Log算子能够检测出单边缘的道路特征,二值化阈值为20,但与相位一致性检测出的道路特征相比,Log算子定位精度不准确,图中道路边界偏离道路中心线。图12b二值化阈值为40,可以看出椭圆标注区域的道路特征未被检测出,阈值足够小时能够检测出该区域道路特征,但噪声也会增加。而在图10中,相位一致性几乎检测出所有的道路特征,且是单响应边缘,定位准确,不受图像亮度、对比度的影响,与人眼视觉一致。本文阈值选择以能够最大限度地检测出道路特征并含有较少的噪声为准。
通过以上实验比较可以看出,相位一致性二值化阈值设置时范围较小,设置较简单,乡村图二值化阈值为0.9,城市图二值化阈值为0.7,阈值变化范围较小;而Canny算子乡村图二值化阈值为25,城市图二值化阈值为60;Log算子乡村图二值化阈值为20,城市图二值化阈值为40。可见Canny算子和Log算子二值化阈值范围较大,受图像亮度和对比度的影响。将检测出的道路特征叠加到原图像上后比较可以看出,相位一致性检测精度要高于Canny算子和Log算子;由于Canny算子是求取一阶导数极大值检测边缘的,在脉冲型边缘亦即非单像素宽边缘检测时会有双边缘响应,而相位一致性能够产生与人眼视觉系统相符合的边缘特征。

图11 Canny算子检测道路图像Fig.11 The detection images by Canny
3 结论
相位一致性在频率域中进行特征检测克服了在空间域中进行特征检测易受图像亮度、对比度影响的问题,即相位一致性检测特征时对图像亮度和对比度具有不变性,对原始图像上亮度和对比度不同的特征能够产生相同的相位一致性响应值,进而设置统一的二值化阈值检测出所有特征。设置阈值比较简单,而且相位一致性与人类视觉系统对图像特征的认知相一致,能够准确地定位出单边缘的道路特征。该方法检测道路特征效果要优于Canny算子和Log算子,且文中主要针对中低分辨率遥感影像上的道路特征提取进行了研究,在高分辨率遥感影像上进行道路特征提取将是今后研究的重点。

图12 Log算子检测道路图像Fig.12 The detection images by Log
[1] 徐友春,李华,王肖,等.基于单目视觉的普通道路检测方法[J].军事交通学院学报,2010,12(5):51-54.
[2] MORGAN A D,DAGLESS E L,M ILFORD D J,et al.Road edge tracking fo r robot road follow ing[J].Image and Vision Computing,1990,8(3):233-240.
[3] MORRONE M C,OWENS R A.Feature detection from local energy[J].Pattern Recognition Letters,1987,6(5):303-313.
[4] KOVESIP.Image features from phase congruency[J].Computer Vision Research,1999,1(3):1-26.
[5] KOVESI P.Invariant M easures of Image Features from Phase Info rmation[D].The University of Western Australia,1996.
[6] OWENS R A,VENKA TESH S,ROSS J.Edge detection is a p rojection[J].Pattern Recognition Letters,1989,9:223-244.
[7] 张洪刚,陈光,郭军.图像处理与识别[M].北京:北京邮电大学出版社,2006.
[8] 胡志萍.图像特征提取、匹配和新视点图像生成技术研究[D].大连理工大学,2005.
Road Feature Detection Based on Phase Congruency Using Remote Sensing Image
WEIChun-tao1,L ICai-lu1,YANG Xian-w u2,WU Ping1
(1.Department of Civil Engineering,Guilin University of Technology,Guilin 541004;
2.Department of U rban and Environment,Xinyang N ormal University,Xinyang 464002,China)
In spatial domain,the resultsof road feature detection are suscep tible to the brightness and contrast of image.To overcome this shortcoming,the features in frequency domain have been detected in this paper.The phase congruency method w hich is based on frequency domain to detect feature has invariance to brightness and contrast,and featuresof image are show n to be the largest phase congruency in the frequency domain.The phase congruency value of six directions have been calculated, and then the sum of the six valuesareobtained,a fixed threshold has been set to get a binary image.The road can be detected by mathematicalmo rphology,and the noise is also removed.Experiment results show that themethod is not sensitive to the changes of brightnessand contrast,and it can detect road feature accurately,and the featuresw hich are detected by phase congruency are consistent with human feature percep tion.
remote sensing image;phase congruency;mathematicalmorphology;road;feature detection
TP75
A
1672-0504(2011)04-0062-05
2010-12-02;
2011-03-14
广西自然科学基金“基于频率域的遥感影像特征检测算法”(桂科自0728219);广西科学基金:广西区应用基础研究专项“工程建筑变形监测非线性融合变形分析与预报研究”(桂科基0991023);广西研究生教育创新计划项目(2010105960816M 19)
韦春桃(1968-),女,博士,副教授,研究方向为遥感与地理信息系统。E-mail:wct2005@glite.edu.cn
