自整定模糊PID算法在微电网MPPT中的应用研究
2011-12-27肖俊明祝海明刘鹏程杜迎虎
肖俊明,祝海明,谭 明,刘鹏程,杜迎虎
(1.中原工学院,郑州450007;2.重庆大学,重庆461000)
自整定模糊PID算法在微电网MPPT中的应用研究
肖俊明1,祝海明1,谭 明2,刘鹏程1,杜迎虎1
(1.中原工学院,郑州450007;2.重庆大学,重庆461000)
分析了现有光伏电池MPPT控制方法的优点和不足,提出了一种基于自整定模糊PID算法的光伏电池MPPT控制系统.在Matlab/Simulink环境下建立了光伏电池模型和基于自整定模糊PID算法的MPPT控制系统.仿真结果表明:该系统跟踪速度快、静态误差小;当外界环境变化时,能够迅速准确地作出响应,找到最大功率点;系统在稳定时基本消除了震荡现象,具有良好的动态和静态特性.自整定模糊PID控制具有较强的自适应能力和鲁棒性.
自整定模糊PID;最大功率点跟踪;微电网;光伏发电系统;Matlab/Simulink
随着煤炭、石油、天然气等不可再生资源的减少,环境和能源问题日益突出,人们逐渐认识到走可持续发展道路的重要性,开始了对可再生资源的深入研究.以分布式发电(DG,Distributed Generation)为能源的微电网技术发展迅速,成为未来电网发展的重要方向.太阳能作为取之不尽、用之不竭的绿色能源,在微电网系统中一直占有很大比重,但光电转换效率低一直是制约其发展的瓶颈.通过电力电子技术和现代控制技术实现光伏电池一直在最大功率点(MPP)工作,是解决这一问题的有效措施,它能使光伏电池阵列的输出功率增加15%~36%[1].
1 微电网系统
微电网概念的提出始于20世纪末.1999年美国电力可靠性技术解决方案协会(CERTS)在微电网的可靠性、经济性及微电网对环境的影响等方面展开研究.CERTS提出的微电网模型与大电网之间只有一个公共连接点,并且不向大电网输出电能,所以从系统的角度看,对于大电网而言,微电网是一个单一的可控负载.微电网既可以与配电网互联运行,也可以独立运行(称为孤立运行方式)[2].当配电网出现故障时,微电网会自动与配电网发生解列,进入独立运行状态,从而保证微电网内部用户的用电可靠性.微电网的这种结构功能特点、控制和保护策略、能量管理方式与常规分布式发电技术都有较大不同,需要进行专门的研究.
2 光伏电池特性及MPPT控制
2.1 光伏电池特性
根据光伏电池的P-N特性[3],基于光伏电池物理概念可得到光伏电池的等效电路图,如图1如示.
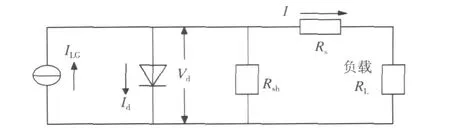
图1 光伏电池等效电路图
由图1可得出光伏电池的输出特性方程[4]:


式中:I、V分别为电池单元的输出电流和电压;ILG为光电流;IOS为光伏电池的暗饱和电流;K1为温度系数;λ为日照强度;ISCR为标准测试条件下光伏电池的短路电流;A为二极管因子;K为波尔兹曼常数;T为开氏温度;q为电荷电量.
开路电压为:

光伏电池阵列的输出特性方程为:

其中,np、ns分别为光伏电池阵列中的并联和串联个数.
光伏阵列的暗饱和电流为:
从式(1)和式(2)可以看出:P(光伏阵列的输出功率)是S(光照强度)和T(温度)的非线性函数,它在S和T一定时,存在一个唯一的最大值.图2、图3所示为不同光照强度下的U-I特性曲线和不同温度下的P-V特性曲线.

图2 不同光照强度下的光伏电池U-I特性曲线
2.2 光伏电池MPPT控制
扰动观察法是现在比较流行的MPPT控制方法,它具有较高的转换效率.但这种方法中MPPT电路功率开关的占空比变化量△D是个定值(D为PWM控制的占空比).这样会导致:当△D较大时,系统控制速度较快,但在MPP点附近系统波动较大,影响系统的稳定性及光电转换效率;当△D较小时,系统能在MPP点附近保持稳定并波动较小,但对外界条件变化的响应速度明显较慢.
本文提供的方法是将自整定模糊PID控制应用到扰动观察法中,通过负载的功率变化来直接调节占空比变化量△D的大小以实现MPPT控制.图4所示为P-D关系示意图.当dP/dD=0时,输出功率达到最大功率点.用自整定模糊PID控制来调节唯一变量△D,能使控制过程简化,在提高效率的同时降低成本.
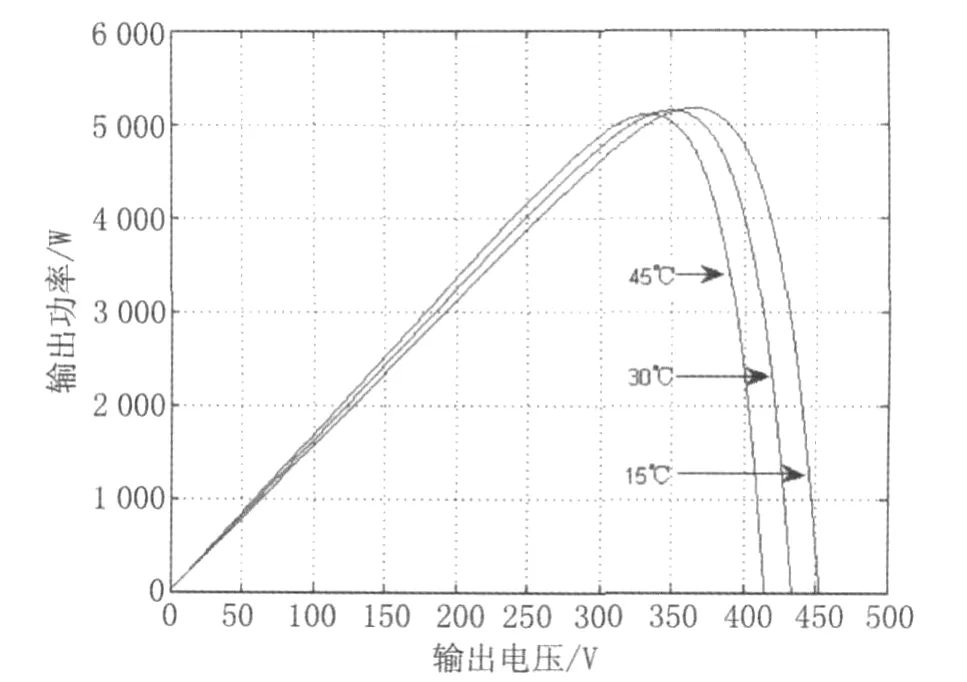
图3 不同温度下的P-V特性曲线
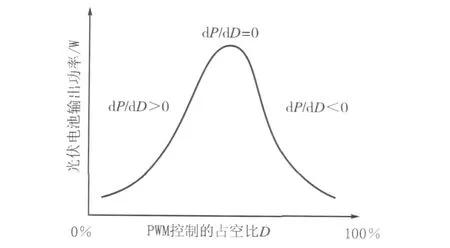
图4 P-D关系示意图
3 自整定模糊PID控制器的设计
3.1 模糊PID控制原理
模糊PID控制也称自整定模糊PID控制.其工作原理是:在常规PID控制的基础上,采用模糊控制逻辑推理方法来调整PID控制算法中的参数;但经过模糊推理得到的结果不是直接作为系统的输出,而是用该结果来整定PID控制的参数,再根据PID算法控制系统的输出.
对于光伏系统而言,由于输出功率受光照强度、光伏电池温度、负载等外界因素的影响较大,其工作情况也很难用精确的数学模型描述.将模糊控制应用到光伏电池的 MPPT 控制中,能取得不错的效果[5-6].但由于模糊控制本身的自寻优特性,单一的模糊控制只能使系统在最大功率点附近来回摆动,即出现振荡现象.而传统的PID控制易于实现,并且能有效消除系统在静态工作点振荡的现象.因此本文采用基于自整定模糊PID算法的MPPT控制,能够处理好控制精度和控制速度这一对矛盾,使光伏电池能在环境发生变化时快速跟踪到最大功率点的变化,并使光伏系统始终工作在最大功率点上,消除系统在最大功率点附近的振荡现象,实现优化控制的作用.
3.2 自整定模糊PID控制的参数整定
自整定模糊PID控制算法的原理如图5所示.
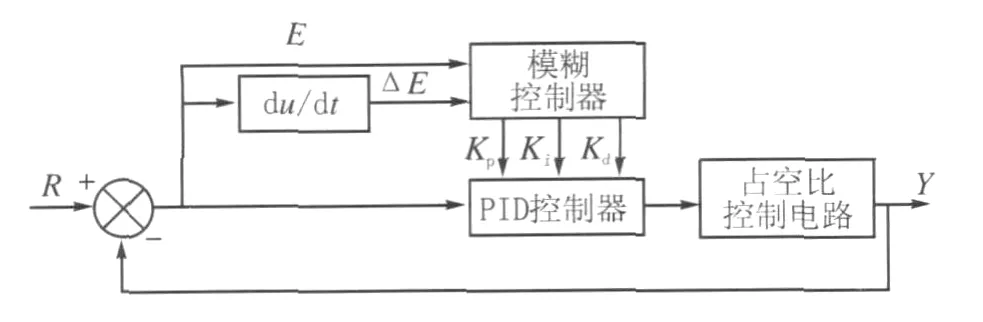
图5 自整定模糊PID控制算法的原理图
3.2.1 PID控制的参数整定
自整定模糊PID控制算法是利用模糊控制算法来优化传统PID控制.其核心技术就是优化传统PID控制参数.
常规PID控制的控制算式为:
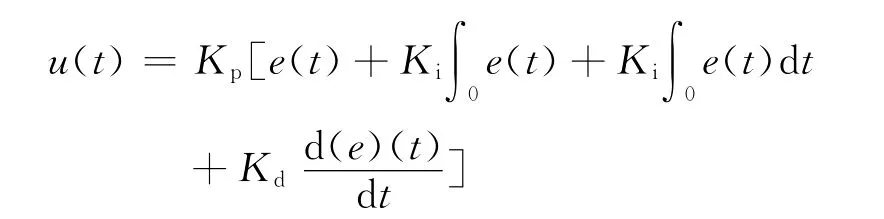
在PID参数整定时,必须考虑到不同时刻比例系数Kp、积分系数Ki、微分系数Kd这3个参数的作用以及它们之间的耦合关系.针对不同的误差E和误差变化量ΔE,参数整定原则如下[7]:
(1)当E较小时,应取较大的Kp和Ki以及适当的Kd,避免系统在平衡点附近出现振荡,使系统具有良好的稳态性能.
(2)当E中等大小时,应取较小的Kp及适当的Ki和Kd,使系统具有较小的超调量.
(3)当E较大时,应取较大的Kp和较小的Kd,使系统响应加快.
3.2.2 模糊控制器的构建
根据以上分析,构建二输入、三输出的模糊控制器,如图6所示.以误差E和误差变化量ΔE作为输入,PID控制的3个参数Kp、Ki、Kd作为输出.当E为0时,系统工作在最大功率点上.
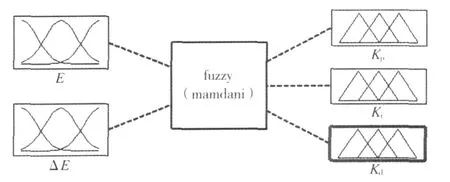
图6 模糊控制器
同样,设定输出 Kp、Ki、Kd的模糊子集为{NB,NM,NS,ZO,PS,PM,PB},并且参数的模糊子集都服从三角分布.
由此得到各模糊子集的隶属函数.图7所示为输入变量E的隶属函数.其他参数的隶属函数和E的一样.
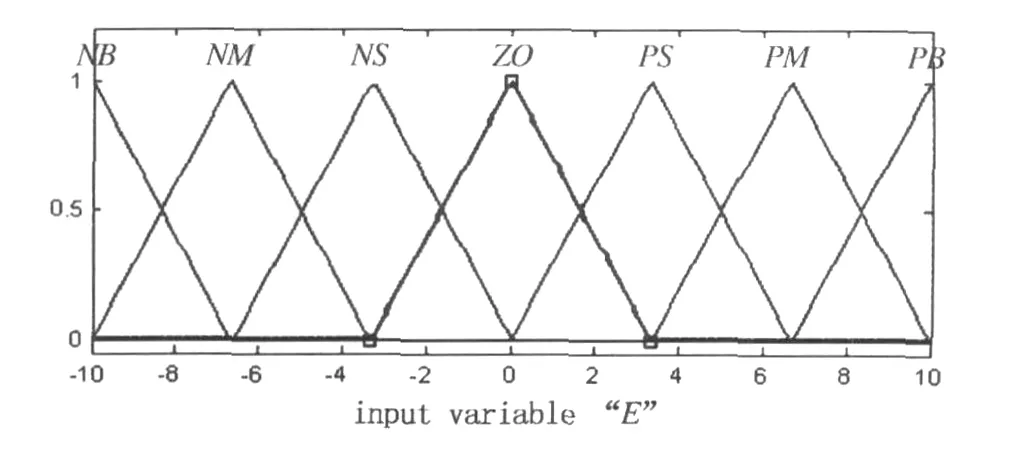
图7 各模糊子集的隶属函数
其中控制器中各参数的论域如下:
E:[-10,10];
ΔE:[-5,5];
Kp:[-15,15];
Ki:[-0.1,0.1];
先由一名英语专业的硕士将原量表翻译成中文,经过相关领域学者的多轮讨论,修改其中措辞晦涩的条目,在保证与原义相符的条件下,尽量通俗易懂。随后由一名英语专业的硕士回译量表,与原量表进行比较,以确保含义接近。最终确定量表的题目后,于专业的在线问卷平台“问卷星”上投放。
Kd:[-1.5,1.5].
根据光伏电池输出特性曲线和PID参数整定原则,得到PID控制的3个参数Kp、Ki、Kd的模糊控制表,如表1所示.
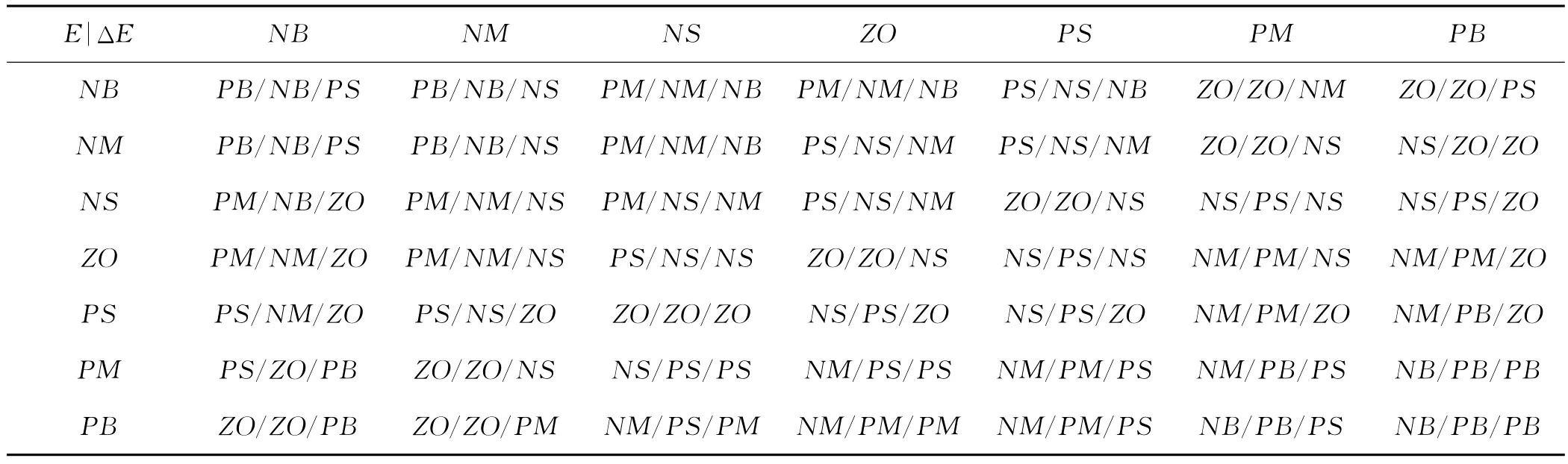
表1 PID参数的模糊控制表
根据表1整理出49模糊控制规则:
(1)If(Eis NB)and(ΔEis NB)then(Kpis PB)(Kiis NB)(Kdis PS)
(2)If(Eis NB)and(ΔEis NM)then(Kpis PB)(Kiis NB)(Kdis NS)
(3)If(Eis NB)and(ΔEis NS)then(Kpis PM)(Kiis NM)(Kdis NB)
……
(49)If(Eis PB)and (ΔEis PB)then (Kpis NB)(Kiis PB)(Kdis PB)
根据这49条模糊控制规则,模糊控制器进行PID控制3个参数Kp、Ki、Kd的自适应调节.在Matlab模糊控制规律观察器里,所得结果经过重心法解模糊化后,得出相应的输出结果.
4 仿真实验
4.1 仿真电路设计
根据光伏阵列数学模型,在Matlab/Simulink环境下建立光伏电池仿真模型.光伏电池模型参数为:开路电压VOC,440V;短路电流ISC,15.9A;最大输出电压Vm,350V;最大输出电流Im,14.7A.标准环境光照强度S为1 000W/m2,标准温度T为25℃.建立基于自整定模糊PID算法的光伏电池MPPT控制系统,它的Matlab/Simulink仿真电路图如图8所示.
在以上光伏电池MPPT控制系统中,自整定模糊PID算法的仿真控制模型如图9所示.
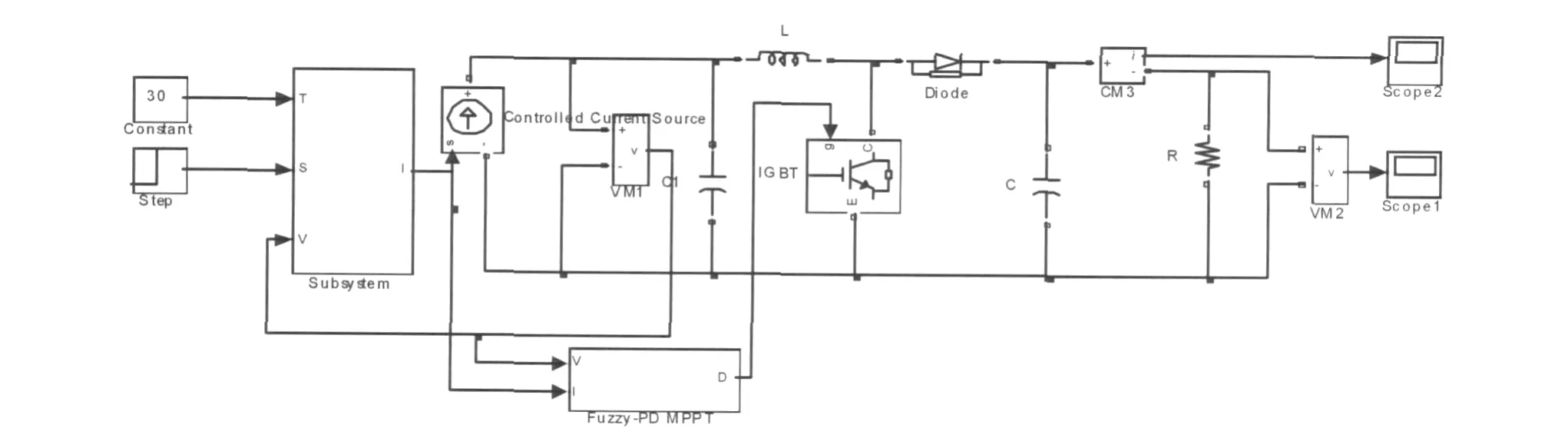
图8 光伏电池MPPT控制电路图
4.2 仿真结果及分析
在光伏电池MPPT控制模型中,分别用传统扰动观察法与自整定模糊PID算法进行仿真实验.第一组实验设定环境温度为30℃不变,在第3s时,系统的光照强度从800W/m2突然升高到1 000W/m2,仿真时间6s,系统仿真结果如图10所示.第二组实验设定光照强度为800W/m2不变,在第3s时,系统的环境温度从25℃突然升高到40℃,仿真时间6s,仿真结果如图11所示.
从图10和 图11可以看出:
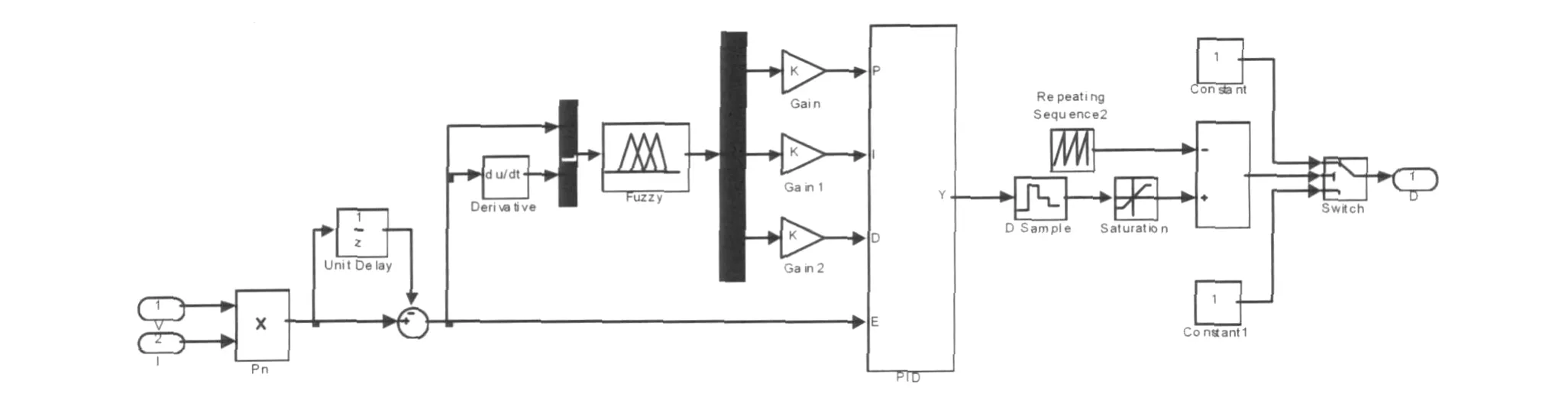
图9 自整定模糊PID控制算法
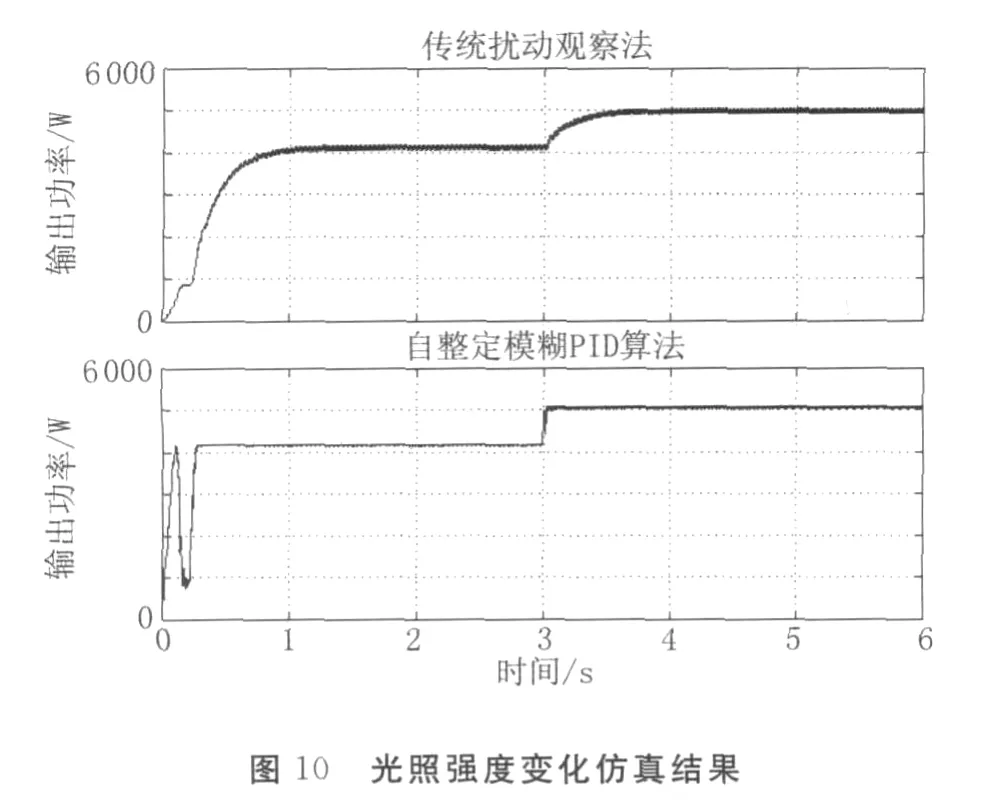
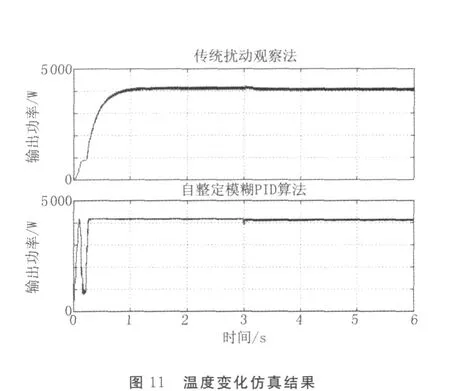
(1)观察扰动法和自整定模糊PID算法分别在0.8s(扰动观察法)和0.3s(自整定模糊PID算法)跟踪到了最大功率点,而后者能够更快速地找到最大功率点.
(2)当外界环境发生变化时,自整定模糊PID控制能够迅速响应外界变化,在0.05s内完成最大功率点的跟踪.可见,自整定模糊PID控制算法在系统调整速度方面远远优于传统扰动观察法.
(3)当系统趋于稳定时,从曲线的平滑程度可以看出,扰动观察法输出波形在最大功率点上下波动,而自整定模糊PID控制算法在最大功率点基本没有波动,相当于定值.可见,传统PID调节对平稳静态工作点和消除波动有很大作用,体现了模糊PID控制的优点.
5 结 语
本文分析了现有光伏电池MPPT控制方法的优点和不足,提出了一种基于自整定模糊PID算法的光伏电池MPPT控制系统.在Matlab/Simulink环境下建立了光伏电池模型和基于自整定模糊PID算法的MPPT控制系统.仿真结果表明:自整定模糊PID控制系统响应速度快、静态误差小;当外界环境变化时,能够迅速准确地做出响应,找到最大功率点;系统在稳定时基本上消除了震荡现象,具良好的动态和静态特性.
[1] 杨帆,彭宏伟,胡为兵,等.太阳能电池最大功率点跟踪技术探讨[J].电子器件,2008,31(4):1081-1084.
[2] Robert Lasseter,Abbas Akhil,Chris Marnay,et al.White Paper on Integration of Distributed Energy Resources[EB/OL].[2011-11-15].http://certs.lbl.gov/pdf/50829-app.pdf.
[3] 任驹,郭文阁,郑建邦.基于P-N 结的太阳能电池伏安特性的分析与模拟[J].光子学报,2006,35(2):171-175.
[4] 吴海涛,孔娟,夏东伟.基于 Matlab/Simulink的光伏电池建模与仿真[J].青岛大学学报(工程技术版),2006,21(4):74-77.
[5] VEERACHARY M,SENJYU T,UWZATO K.Feedforward Maximum Power Point Tracking of PV Systems Using Fuzzy Controller[J].IEEE Transaction on Power Electronic System,2002,38(3):969-981.
[6] WELCH R L,VEN.AYAGAMOORTHY G K.Comparison of Two Optimal Control Strategies for a Grid Independent Photovoltaic System[C]∥.Industry Applications Conference,2006,41st IAS Annua Meeting,Conference Record of the 2006IEEE.Tampa,USA:IEEE,2006:1120-1127.
[7] 李俊婷,石文兰,高楠.参数自整定模糊PID在温度控制中的应用[J].无线电工程,2007,37(7):47-49.
Self-tuning Fuzzy PID Algorithm in the Application of the MPPT
XIAO Jun-ming1,ZHU Hai-ming1,TAN Ming2,LIU Peng-cheng1,DU Ying-hu1
(1.Zhongyuan University of Technology,Zhengzhou 450007;2.Chongqing University,Chongqing 400044,China)
The photovoltaic cell MPPT control method in the strengths and weaknesses is analysed.Based on fuzzy self-tuning PID algorithm of the photovoltaic cell MPPT control system is proposed.In Matlab/Simulink environment model of photovoltaic cells based on self-tuning fuzzy PID algorithm of MPPT control system is established.Simulation results show that:This method has tracking speed,the static error is small,when the external environment changes,responds quickly and accurately finds the MPP,especially when the system is stable and substantially the vibration phenomenon is eliminated,has a good dynamic and static characteristics.Self-tuning fuzzy PID control has a strong adaptive ability and robustness.
self-tuning fuzzy-PID;maximum power point tracking;micro-grid;photovoltaic power system;Matlab/Simulink
TP13
A
10.3969/j.issn.1671-6906.2011.06.012
1671-6906(2011)06-0057-06
2011-11-21
肖俊明(1960-),男,河南卫辉人,教授.
