新型压电行走机构的行走特性
2011-12-23杨松华刘元林陈国辉刘安平
杨松华, 刘元林, 陈国辉, 刘安平
(1.黑龙江科技学院 机械工程学院,哈尔滨 150027;2.黑龙江科技学院 工程训练与基础实验中心,哈尔滨 150027)
新型压电行走机构的行走特性
杨松华1, 刘元林1, 陈国辉1, 刘安平2
(1.黑龙江科技学院 机械工程学院,哈尔滨 150027;2.黑龙江科技学院 工程训练与基础实验中心,哈尔滨 150027)
压电行走机构是利用压电陶瓷逆压电效应和谐振特性,将电能转化为机械能的一种新型驱动装置。为避免惯性、摆动、两足移动式压电行走机构运动形式单一问题,研制了一种新型的压电行走机构振动测试系统。通过实验获得了驱动电压、谐振频率、负载载荷、振动角等诸多因素对机构行走速度和在沿行走方向上的驱动力的影响规律。分析显示,行走机构在滑移状态下,行走速度出现最大值,运行平稳;行走装置的后足设置行走轮时,行走状态最好。实验结果为压电行走机构驱动控制系统的设计提供了必要的数据依据。
压电行走机构;压电陶瓷;逆压电效应;行走特性
0 引 言
压电陶瓷是一种先进的智能材料,除具有压电效应外,还具有谐振特性。压电晶体的谐振特性,就是当给压电晶体输入一个电信号时,如果电信号频率与压电晶体的谐振频率相等,通过逆压电效应能使压电晶体产生强机械振动[1-2]。压电行走机构正是利用压电陶瓷逆压电效应和谐振特性,将电能转化为机械能的一种新型驱动装置。它具有体积小、驱动精度高、分辨率高、不发热、噪声小且没有回转部件,可以进入深孔内工作,解决深孔内表面测量中的一些问题[3-4]。
目前的压电行走机构主要有惯性移动式、摆动移动式和两足移动式行走机构。惯性移动式行走机构利用压电振子在电信号激励下快速伸长所产生的惯性力驱动机构移动,摆动式行走机构利用与管道接触的两足产生微小蠕动,两足式行走机构利用与地面接触的两足而产生运动[5-6]。这些行走机构大都存在运动形式单一的问题。因此,在吸取一些压电行走机构经验的基础上,从机械设计和力学分析入手,研制了一种新型压电振动行走机构,通过实验对其行走特性加以研究。
1 实 验
1.1 实验设备
如图 1所示的振动角分别为 20°、45°和 60°的压电行走机构三个,SG-1648型功率信号发生器一台,HPV系列压电陶瓷驱动电源,宽 55 mm、长290mm的导槽,示波器一台,质量为 50、100、200、300、500 g的砝码各一个。
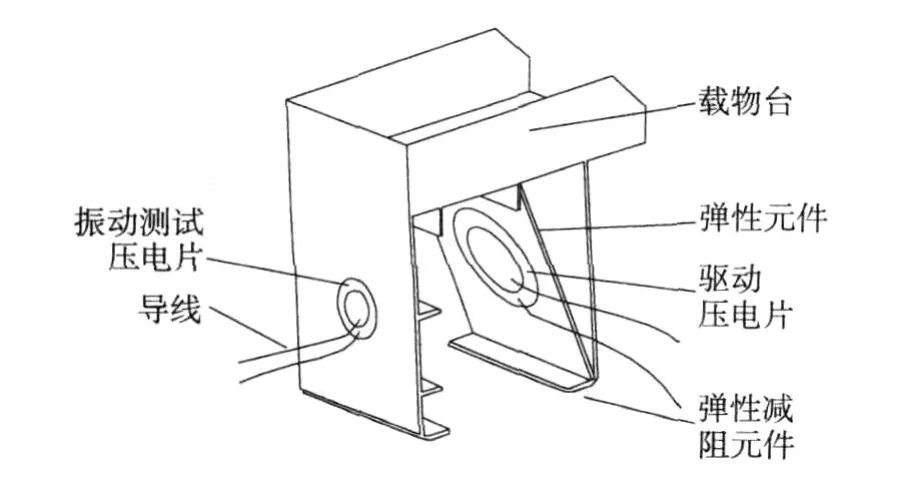
图1 压电行走机构结构Fig.1 Structure of piezoelectric walking mechan ism
1.2 实验步骤
首先,选定振动角为 20°的实验装置,将驱动电压调到 50 V,调节功率信号发生器,使压电行走装置工作在谐振频率、空载状态下,记录装置走过固定距离所用的时间,反复做五次后取平均值为最后的数据,计算出装置行走的速度;依次增大驱动电压,工作频率不变,记录装置在固定的距离内行走的时间,重复五次后计算出装置的行走速度。其次,改变装置的载荷,由小到大依次增加,重复以上实验。再次,改变行走装置与接触面间的接触模式,分别在前后足安装行走轮,测量装置在与行走面不同接触方式下的行走速度。最后,改变装置的振动角,分别选择振动角为 45°和 60°的实验装置,重复以上实验。
2 结果及分析
2.1 外部因素
压电行走装置的行走速度受多个外部因素的影响,如驱动电压U、谐振频率f、载质量m等。
为了测量驱动电压对行走装置的影响程度,选取振动角为 20°的行走装置为实验对象,载质量分别为空载、50、100、200、300 g,并将工作频率调节到行走装置的最佳谐振频率 975 Hz,其他因素保持不变,由小到大调节驱动电压,测得驱动电压和行走速度之间的关系曲线如图 2所示。由图 2可见,当驱动电压比较低时,装置工作在滑移状态下,行走速度随着驱动电压的增大而增加,直到出现跳移动,装置的行走速度随驱动电压的增大而减小;当载质量为零时,驱动电压加到 100 V,行走装置出现剧烈的跳移动现象,行走速度比 75 V驱动电压时有所降低。当驱动电压固定不变时,载质量影响装置的行走状态,质量较小时,装置的行走速度较低,随着质量的增加,速度也增加,当载质量达到一定值后,行走速度将随着载质量的增加而降低,直到速度为零。
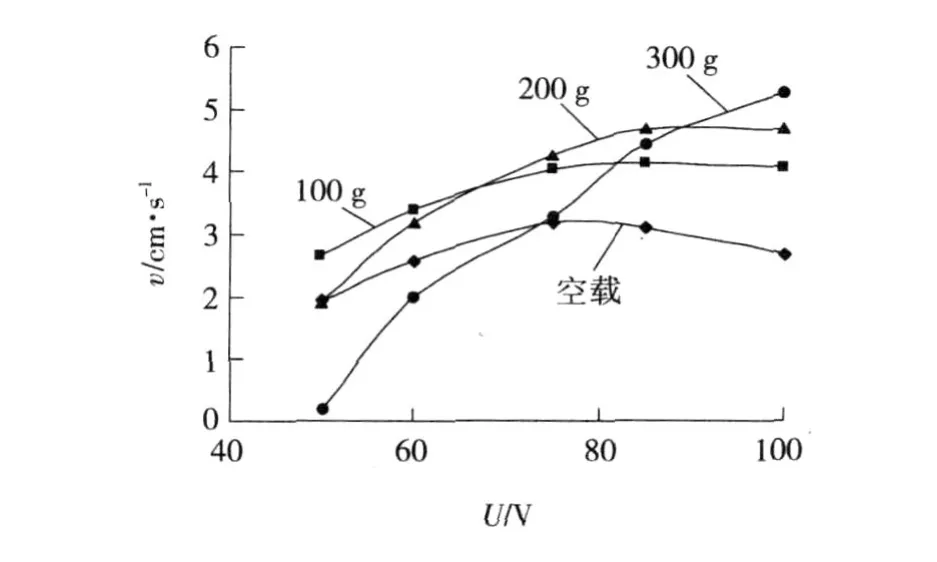
图 2 振动角为 20°时的电压—速度曲线Fig.2 Voltage-velocity curves with vibration angle of 20°
装置工作的谐振频率点可能为两个或多个。选择驱动电压为 50 V,振动角为 20°的行走装置为实验对象,实验时为空载状态。调节功率信号发生器,使频率值由低到高依次增加,测得的速度曲线如图3所示。从图 3中可知,当电源信号功率为 650 Hz时,机构开始移动;行走速度在频率为 685 Hz时达到最大,然后速度下降,在频率为 700 Hz左右时速度为零;随着频率的继续上升,装置出现倒移动,当频率为 725 Hz时,倒走速度达到最大。频率继续增加,速度相应下降。当频率达到 760 Hz时,装置开始向前移动,当频率为 920 Hz时,装置将会再次出现倒移动,频率达到 1 017 Hz时倒移动速度达到最大。随着频率的增加,行走速度迅速下降。当频率为 1 022 Hz时,速度为零;频率值继续增加,装置没有出现行走现象。由实验分析可知,装置在行走速度上会出现多个极值点,在这些极值点附近会出现正走和倒走的速度极值,因此机构相应也会出现正走和倒走现象。

图3 装置的频率—速度曲线Fig.3 Device frequency-velocity curve
给行走装置加一定质量的载荷,通过实验确认载荷对装置的行走速度的影响。调节功率信号发生器到最佳谐振频率f,首先测试空载时的行走速度,然后逐渐加大载荷,图 4中曲线分别表示振动角为 20°、45°和 60°时的载荷—速度曲线。当载质量为零即空载状态时,装置在谐振频率下容易出现跳移动现象。随着载质量的增加,行走状态逐渐由跳移动过渡到滑移动状态,且行走速度有所增加。振动角为 20°和 45°时,速度随着载质量的增加而增加,当载质量达到某一值时,速度达到最大,而后速度会随着载质量的增加而减小;振动角为 60°,当载荷较小时,随着载荷的增加速度没有明显的变化,当载荷继续增加时,速度随着载荷的增加而减小。
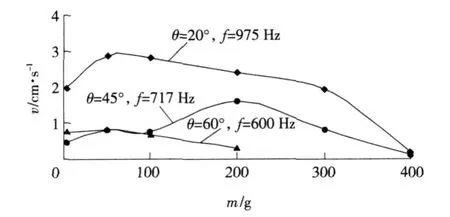
图 4 驱动电压为 50 V时的载荷—速度曲线Fig.4 Load-velocity curves with driv ing voltage of 50 V
2.2 结构参数
压电行走机构的结构参数主要是振动角。振动角指的是贴有压电片的弹性元件的振动方向与行走平面之间的夹角,改变弹性元件的粘贴方向即可改变振动角。调节功率信号发生器的频率值至最佳工作状态 (振动角为 20°、45°、60°时的最佳谐振频率分别为975、717、600 Hz),测量行走装置在不同振动角时的行走速度。当驱动电压为 50 V时,在不同的载质量下,行走速度与振动角之间的关系曲线如图5所示。由图 5可以看出,振动角对行走速度有较为明显的影响。(1)当装置所承受的载荷较小时,驱动电压和谐振频率不变、振动角为 20°时,装置的行走速度最大。随着振动角的增大,速度逐渐降低。当振动角为 45°时,速度基本达到最小值点,然后随着振动角的继续增大,速度逐渐增大。(2)当装置所承受的载荷较大时,速度随着振动角的增大一直减小。当振动角大于 45°时,速度随着振动角的增大急剧下降。(3)当装置所承受的载荷继续增大时,速度随着振动角的增大而增大,当振动角为 45°时,速度基本达到最大。随着振动角的继续增大,行走速度逐渐减小。由上述结论可知,振动角对装置行走速度的影响跟装置所承受的载荷有关。
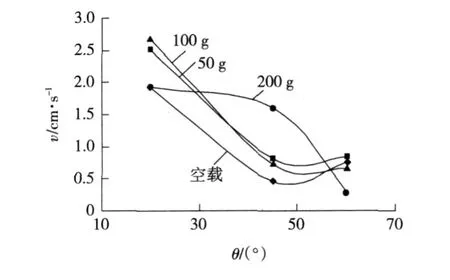
图5 驱动电压 50 V时速度曲线Fig.5 Velocity cruves with driving voltage of 50 V
实验选择在光滑的玻璃板上进行。前述实验是在行走装置的前后足底面与行走表面接触处粘贴弹性减阻元件(塑铜线的塑料套或金属丝),现在改变这种滑动式的行走方式,在装置的前足或后足加装行走轮,保持驱动电压、振动角不变,调节频率到最佳谐振频率。图 6为驱动电压为 50 V时不同接触方式下的速度曲线。由图 6可知,在其他相同条件下,在前足安装行走轮时,速度随着载荷的增加没有明显的减小;在后足安装行走轮和无行走轮 (粘贴弹性减阻元件)时,速度随着载质量的增加有明显减小的趋势,且后足安装行走轮时的速度始终大于无行走轮 (粘贴弹性减阻元件)时装置的行走速度;在载质量较小时,三种装置行走速度间的关系是:后足安装行走轮 >无行走轮 (粘贴弹性减阻元件)>前足安装行走轮。
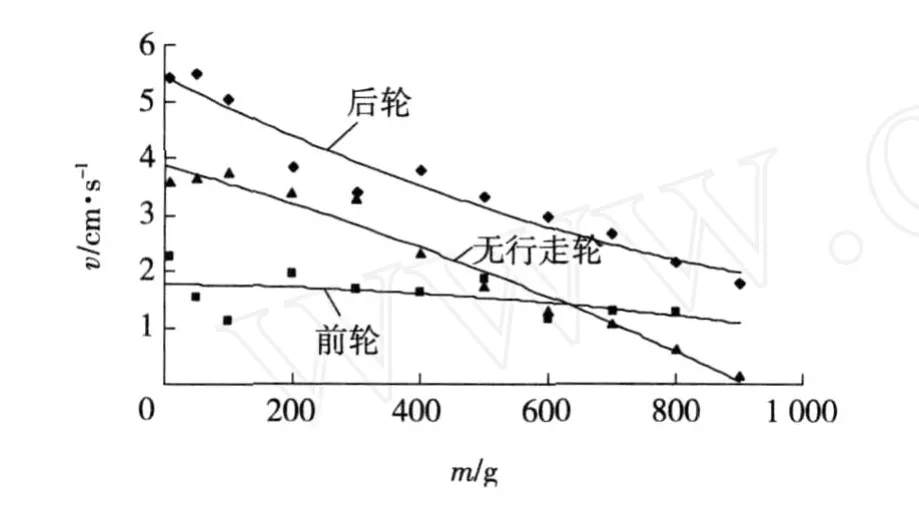
图6 不同接触方式下的速度曲线Fig.6 Velocity cures under different contactmode
实验分析机构行走速度与驱动电压、谐振频率、负载载荷等诸多因素之间关系的同时,还进行了机构驱动力测量实验,限于篇幅在此不作分析。
3 结 论
利用自行设计的压电行走机构,通过一系列振动测试实验,对影响行走机构运动特性的几个因素进行了研究,发现了一些新的运动现象。
(1)行走装置在驱动电压、谐振频率、负载载荷、振动角等因素的影响之下会出现滑移动、跳移动、倒移动等不同的行走状态。行走机构出现跳移动时,行走速度较低,且噪音较大。当工作在滑移动状态时,行走速度出现最大值,装置运行平稳。
(2)驱动电压较小时,机构的行走速度与驱动电压呈现正比关系,但当驱动电压达到一定值后,机构的速度随着电压的升高而降低。谐振频率是影响行走速度的一个重要因素。装置在不同的谐振频率点的工作状态不同,除速度不同外,装置行走的方向也可能不同。在装置的后足安装行走轮时,装置的行走状态最好,其次为无行走轮 (粘贴弹性减阻元件)。
(3)振动角对机构行走速度的影响较大。实验表明,当振动角较小时,装置的行走速度较快;随着振动角的增大,行走速度逐渐降低。
[1] 罗 怡,龚振邦,孙麟治,等.双压电薄膜微机器人驱动器的模态分析[J].高技术通讯,2001(3):85-87.
[2] 刘品宽,温志杰,李 锦.惯性冲击驱动管内移动机器人设计[J].光学精密工程,2008,16(12):2 320-2 326
[3] 李欣欣,卢全国,程光明.压电型步进式精密直线驱动器的实验研究[J].压电与声光,2005,27(2):136-138.
[4] 许黎明,胡德金,张广鹏,等.压电陶瓷微位移驱动技术的研究[J].制造技术与机床,2003(9):31-36.
[5] 温建明,程光明,曾 平,等.改变正压力的惯性式压电旋转机构[J].光学精密工程,2008,16(1):82-86.
[6] 曾 平,李晓韬,程光明.新型压电单振子移动机构的试验研究[J].压电与声光,2007,29(5):622-624.
Walking characteristics of new type of piezoelectric walking mechanism
YANG Songhua1,L IU Yuanlin1,CHEN Guohui1,L IU Anping2
(1.College ofMechanical Engineering,Heilongjiang Institute of Science&Technology,Harbin 150027,China; 2.Center for Engineering Training&Basic Experimentation,Heilongjiang Institute of Science&Technology,Harbin 150027,China)
Piezoelectric walkingmechani sm is a new type of driven device which converts the electrical energy into mechanical energy using converse piezoelectric effect and resonance characteristics of piezoelectric ceramics.This paper is an effort to avoid the single movement form of inertia, swing,and twolegged piezoelectric walking mechanism by proposing a new type of piezoelectric vibration test systems. The experiments found the law governing the impact of driving voltage,resonant frequency,load,vibration angle,and other factors on mechanism walking speed and driving force along the walking direction. The analysis shows thewalkingmechani sm has amaximum walking speed and smooth operation in the slip state,and the best operation when fitted with running gear on back feet.The results provide the necessary reference for designing drive control system of piezoelectric walkingmechanism.
piezoelectric walking mechani sm;piezoelectric ceramic;converse piezoelectric effect; walking characteristics
TP242
A
1671-0118(2011)02-0146-04
2011-03-02
黑龙江省教育厅科学技术研究面上项目(11551432)
杨松华(1964-),男,辽宁省辽中人,高级工程师,硕士,研究方向:机械理论及设计,E-mail:ysh641006@126.com。
(编辑晁晓筠)
