海洋钻机钻杆自动排放系统控制方案设计
2011-12-11石美玉杨国家李富平王运安高学仕
石美玉,杨国家,李富平,王运安,高学仕
(1.中国石油大学(华东)机电工程学院,山东青岛266555;2.山东科瑞控股集团有限公司,山东东营257067) ①
海洋钻机钻杆自动排放系统控制方案设计
石美玉1,杨国家2,李富平1,王运安2,高学仕1
(1.中国石油大学(华东)机电工程学院,山东青岛266555;2.山东科瑞控股集团有限公司,山东东营257067)①
对钻杆自动排放系统驱动装置的液压及电气控制方法进行了设计和分析,绘制了电气及液压控制原理图,并合理选择了主要电气和液压元件。
钻杆排放装置;控制系统;方案
参考多种钻杆自动排放系统[1-3],笔者设计了一种海洋钻机钻杆自动排放系统驱动装置。介绍了此装置的液压及电气控制方案,对驱动装置的各种动作流程和各种动作的控制过程进行了详细的分析,对控制部分使用的电气元件和液压缸等液压元件的使用情况进行了说明。
1 系统装置简介
本次设计主要是对钻杆自动排放系统的抓杆机械手行走和旋转驱动装置的控制进行了方案设计。整个装置安装于海洋井架二层台下方,驱动部分安装于二层台中部的导轨上。具体工作方式为:装有驱动装置总成的小车由多级液压缸驱动,沿导轨直线运动,完成机械手在井架中纵向运动;驱动装置总成到达指定立根纵向位置后,多级液压缸停止伸缩运动,由摆动液压缸控制旋转装置完成90°旋转;用手动控制抓取立根机械手完成手臂的抬升与下放、机械手抓紧与松放立根及送进与退出等动作,完成抓取立根操作;最后,由多级液压缸驱动整个驱动装置将立根送到井口。抓杆机械手驱动装置如图1所示。
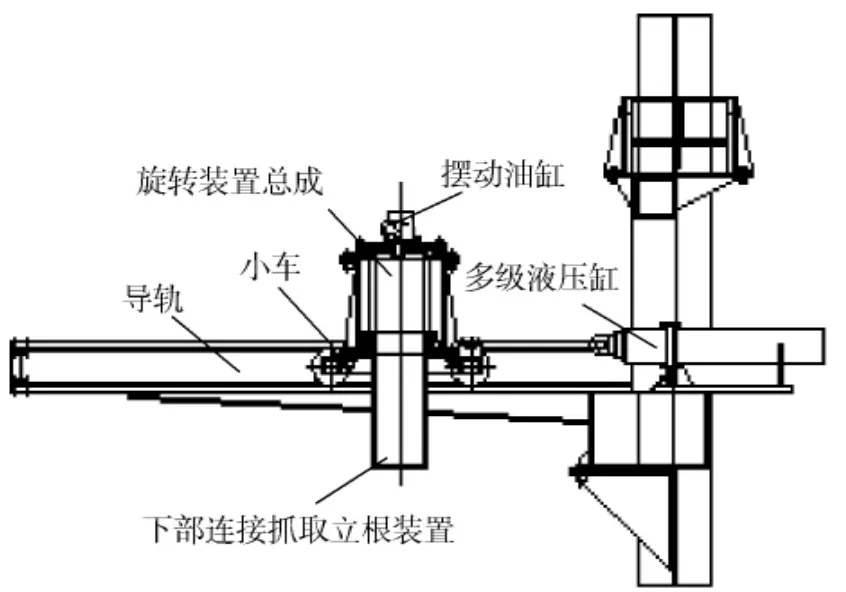
图1 抓杆机械手驱动装置
2 控制方案设计
2.1 电气控制
小车运动过程中,如何实现其在指定某排立根处停止运动是整个控制方案的最主要部分。本方案运用霍尔元件制作接近开关的原理对小车运动位置进行检测,结合PLC控制系统对小车的启停进行控制[4-5]。
霍尔元件的霍尔件感应端安装在小车中心处,在导轨上对应每排立根中心安装霍尔元件感应磁铁,共20个,按小车经过的次序对其进行编号;伸缩式多级液压缸伸出推动小车沿导轨移动,霍尔件感应端每经过1个磁铁,便产生1个感应脉冲,由接收到的感应脉冲的数目控制小车的启停。如果下钻时需抓取第5个磁铁对应的1排立根,对控制程序进行设定,小车运动过程中,当程序接收到5个脉冲信号时,小车停止运动,摆动油缸向左旋转90°,手动控制机械手臂开始抓取立根,立根抓取完成后,摆动缸向右回转90°,小车继续向前运动,将立根送至井口。起钻时,工作流程与下钻相反,小车运动控制方案如图2所示。
霍尔元件在此起采集信号的功能,信号反馈给主程序,驱动多级液压缸动作,每排立根对应1段控制程序。以抓取第5个磁铁对应的1排立根为例,几个主要环节的控制原理图及PLC梯形图分别如图3~4所示。图3中接触器K1、K2分别控制多级液压缸伸出、回缩,由按钮SB5控制第5个磁铁对应的立根抓取程序段。图4中电磁铁M20.1、M20.2由K1、K2控制。计数器用于接收脉冲数目,定时器用于设定小车启、停之间的时间间隔。
2.2 液压控制
小车沿导轨运动靠伸缩多级液压缸驱动,小车在运送过程中,由于存在抓取立根与不抓取立根2种状态,故其存在2种速度,因此对此缸的控制要能够实现2种速度的转换;又因随着多级缸使用级数的变化,伸出时作用面积逐渐减小,缩回时逐渐增大,若想保持小车运动速度稳定,运行过程中必须相应地改变缸体的进油量,故采用比例流量阀进行控制[6];另外,还要考虑回油过程中的缓冲问题。多级缸液压控制原理如图5所示。整个控制回路由多级缸回油缓冲、多级缸速度控制、多级缸换向控制3个部分组成[7]。
小车运动至指定位置后,由摆动液压缸控制旋转装置进行旋转,摆动缸液压控制原理如图6所示。设定摆动缸每次旋转角度为90°,由电磁铁1YA、2YA控制摆动缸正反转,单向节流阀控制其进出油速度。液压控制部分选定供油压力为16 MPa。图5~6中各个电磁铁的动作可实现的功能如表1。
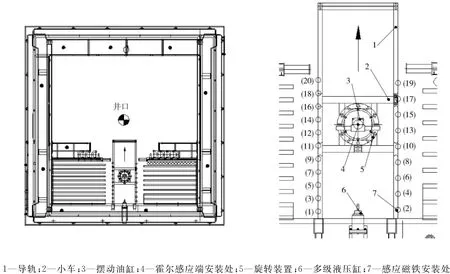
图2 小车运动控制方案
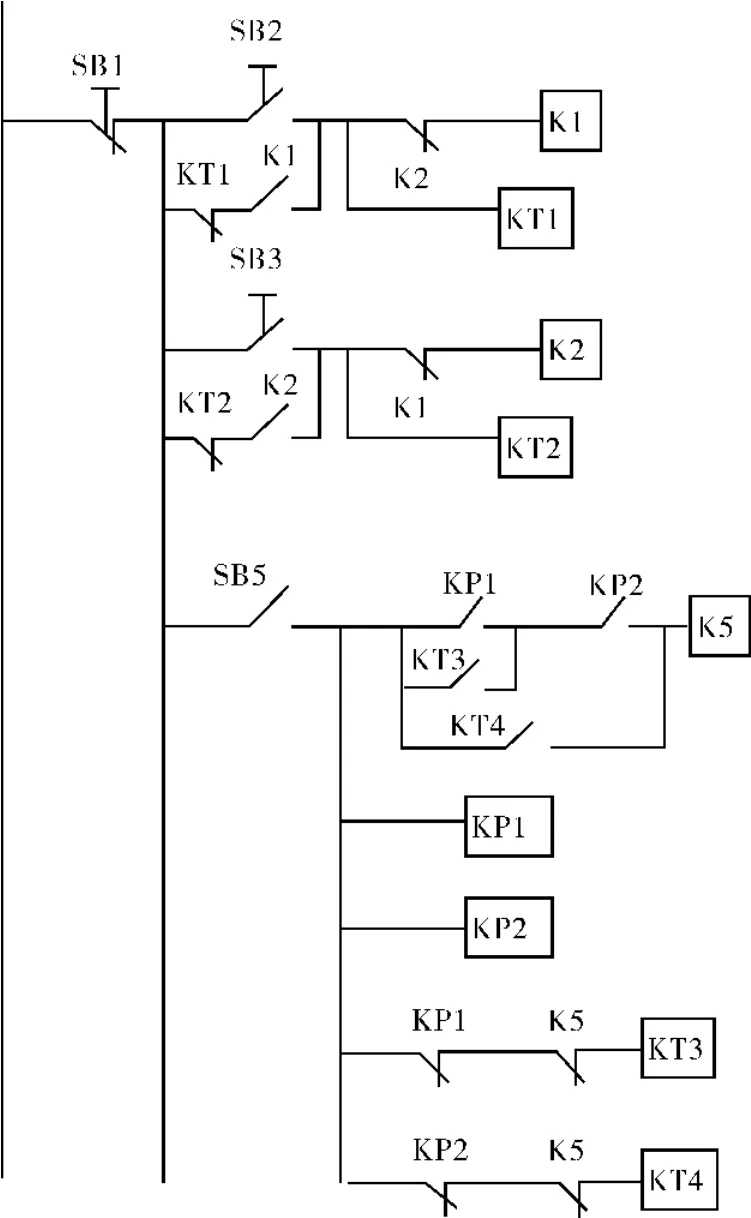
图3 控制原理

图4 控制梯形图
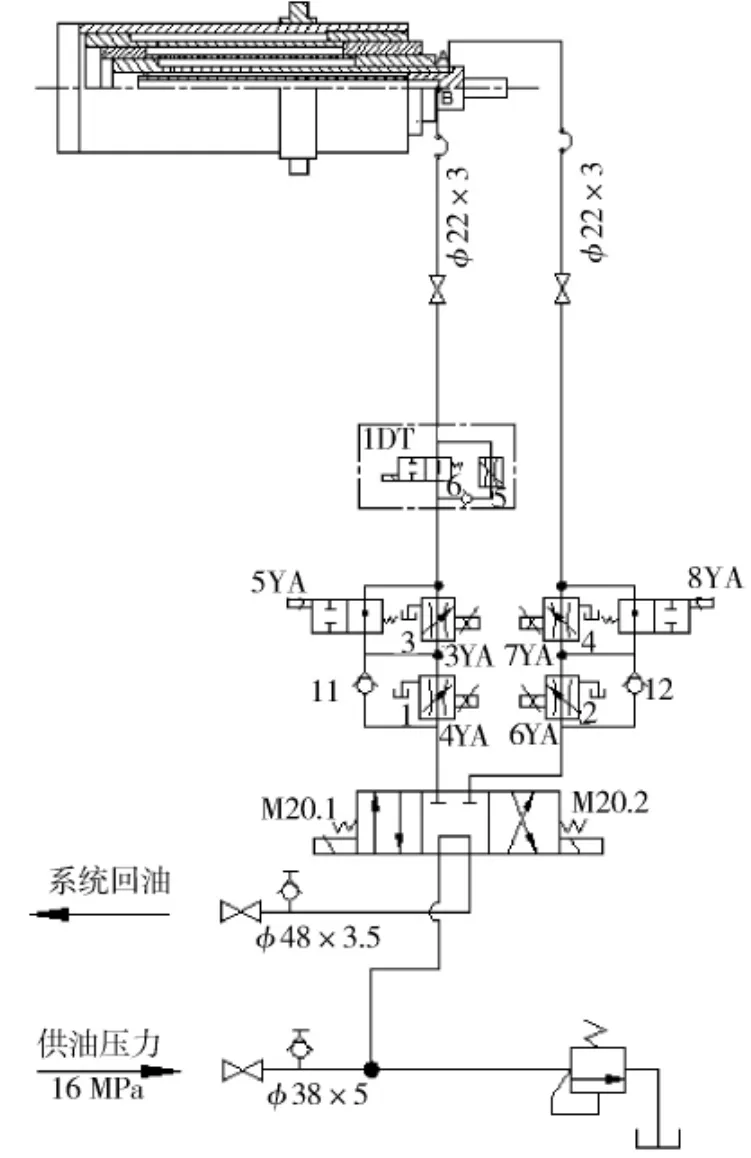
图5 多级缸液压控制原理
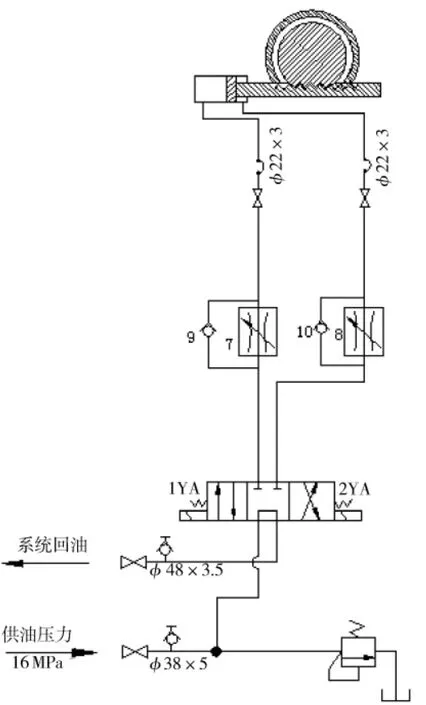
图6 摆动缸液压控制原理
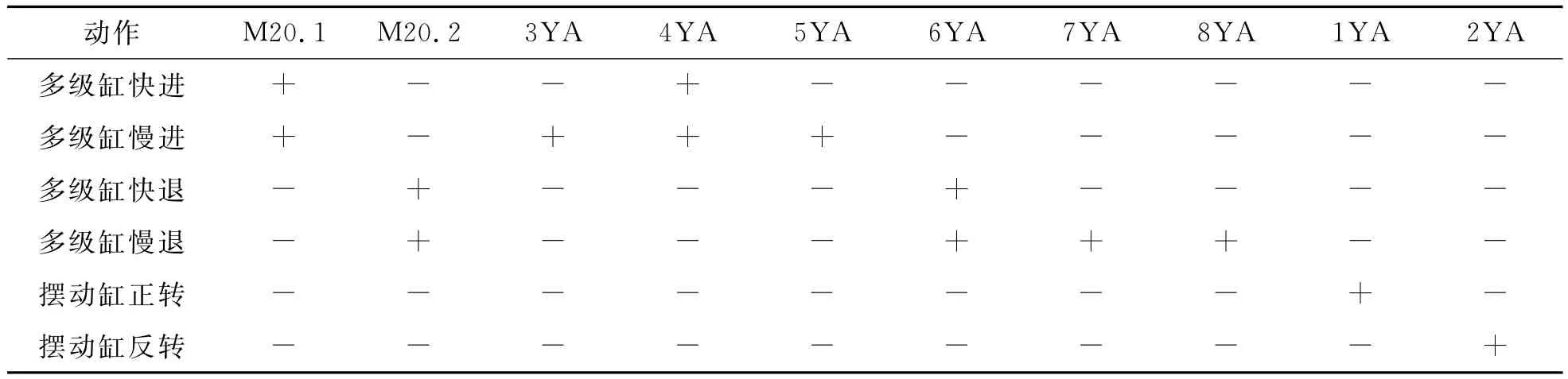
表1 各电磁铁动作可实现的功能
3 结语
笔者在自行设计的海洋钻机钻杆自动排放系统的基础上,对其驱动装置的控制方案进行了详细设计,对驱动小车用多级液压缸和控制旋转装置的摆动液压缸的工作方式进行了详尽的分析。设计分析了电气及液压控制方案,并绘制了相应的电气及液压控制原理图。本次设计提出了一种较新颖的钻杆自动排放系统设计方案,为此类系统的后续发展指出了一个新的思路。
[1] 刘文庆,崔学政,张富强.钻杆自动排放系统的发展及典型结构[J].石油矿场机械,2007,36(11):74-77.
[2] 尹晓丽,牛文杰,张中慧.钻杆自动传送系统及设计方案[J].石油矿场机械,2009,38(7):42-46.
[3] 崔学政,刘文庆,肖文生,等.海洋钻井平台立柱式排管机设计[J].石油矿场机械,2010,39(1):45-49.
[4] 任宏彪,张大志,张勇军.基于S7-300型PLC的变频自动送钻系统模糊控制[J].石油矿场机械,2010,39(4):24-27.
[5] 董 磊,崔学政.现场总线在钻杆操作系统中的应用研究[J].石油矿场机械,2009,38(5):62-65.
[6] 雷天觉.液压工程手册[K].北京:机械工业出版社,1991.
[7] 崔学政,张富强,肖文生,等.海洋钻井平台折臂起重机设计[J].石油矿场机械,2009,38(11):28-31.
Controlling Schematic Design of Drilling Pipe Automatic Arranging System for Offshore Rig
SHI Mei-yu1,YANG Guo-jia2,LI Fu-ping1,WANG Yun-an2,GAO Xue-shi1
(1.College of Mechanical and Electronic Engineering,China University of Petroleum,Qingdao 266555,China;2.Shandong Kerui Petroleum Equipment Co.,Ltd.,Dongying257067,China)
The electrical control method and the hydraulic control method of the Drilling Pipe Automatic Arranging System were both designed and analyzed in detail,the electrical and the hydraulic control principle diagram were both drawn.In addition,the main electrical and hydraulic components were chosen reasonably.
drill pipe racking back device;control system;project
1001-3482(2011)12-0041-04
TE952
A
2011-07-15
石美玉(1987-),女,山东潍坊人,硕士研究生,主要从事石油钻采机械装备的设计工作,E-mail:shimeiyu19870301@163.com。