基于空间矢量控制交流电机变频调速系统
2011-12-09韦建德
韦建德
(海南师范大学 物理与电子工程学院,海南 海口 571158)
基于空间矢量控制交流电机变频调速系统
韦建德
(海南师范大学 物理与电子工程学院,海南 海口 571158)
基矢量控制技术作为交流电机控制的一种方式,已成为高性能变频调速系统的首选方案.空间矢量脉宽调制SVPWM(Space Vector Pulse Width Modulation)方式因具有比SPWM调速方式更优异的性能而得到了广泛应用.文章对交流电机的空间矢量控制变频调速技术进行了研究,通过对实际电机进行控制及仿真实验研究,得到的结果表明:所设计方法是切实可行的,控制系统具有优良的动静态性能和控制效果,具有广泛的应用前景.
电压空间矢量PWM;矢量控制技术;变频调速;交流电机
矢量(磁场定向)控制技术,是通过坐标变换,把交流电机的定子电流分解成转矩分量和励磁分量,用来分别控制电机的转矩和磁通,就可以获得和直流电机相仿的高动态性能,从而使交流电机的调速技术取得了突破性的进展.
1 电压空间矢量原理
对于常规的六拍阶梯波三相逆变器,按照逆变器中功率开关器件的通断状态,一个周期中共有8种工作状态(见图1),以电压空间矢量μ1、μ2、μ3、μ4、μ5、μ6、μ7、μ8表示,并使相邻矢量仅变换1位,前6种工作状态是有效的,后2种工作状态是无效的(逆变器没有输出电压),逆变器的一个工作周期用有效的6个电压空间矢量划分成6个区域,如图1所示的Ⅰ、Ⅱ、…、Ⅵ,每个扇区对应的时间均为π/3.由于逆变器在各扇区的工作状态都是对称的,分析一个扇区的方法可以推广到其他扇区.
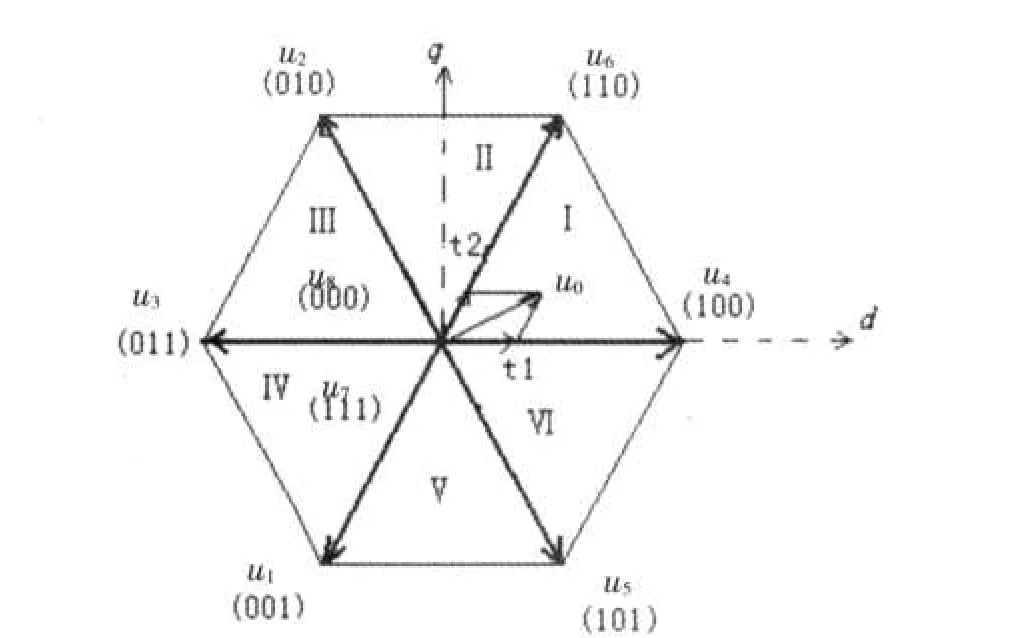
图1SVPWM矢量和扇区空间分布Fig.1SVPWM vectors and sectors
实现SVPWM控制的基本原理就是要把每一扇区再分成若干个对应于时间T0的小区间,并插入若干个线性组合的新电压空间矢量μ0,以获得优于正六边形的多边形(逼近圆形)旋转磁场.T0越短,旋转磁场越接近圆形,采样频率越高,实际波形就越逼近正弦波[1-4].
2 三相交流异步电机转子磁链矢量控制变频调速原理
2.1 电机矢量控制变频调速系统原理[2,5]
图2所示的是交流异步电机矢量控制变频调速系统原理框图,以产生同样的旋转磁动势为准则,采用磁场定向控制将三相定子交流电流iA、iB、iC进行3/2变换(Clarke变换),等效成两相静止坐标系αβ上的两相平衡交流电流iα、iβ,再通过交/直同步旋转变换(Park变换),可以等效成同步旋转坐标系dq下的励磁电流isd和转矩电流isq,与给定励磁电流isdref和转矩电流isqref,经PI电流调节器控制获得电压Vsdref和Vsqref,再经过直/交变换(Park逆变换用Park-1表示)获得αβ坐标下的电压Vsαref和Vsβref,用来决定空间矢量SVPWM波形输出.
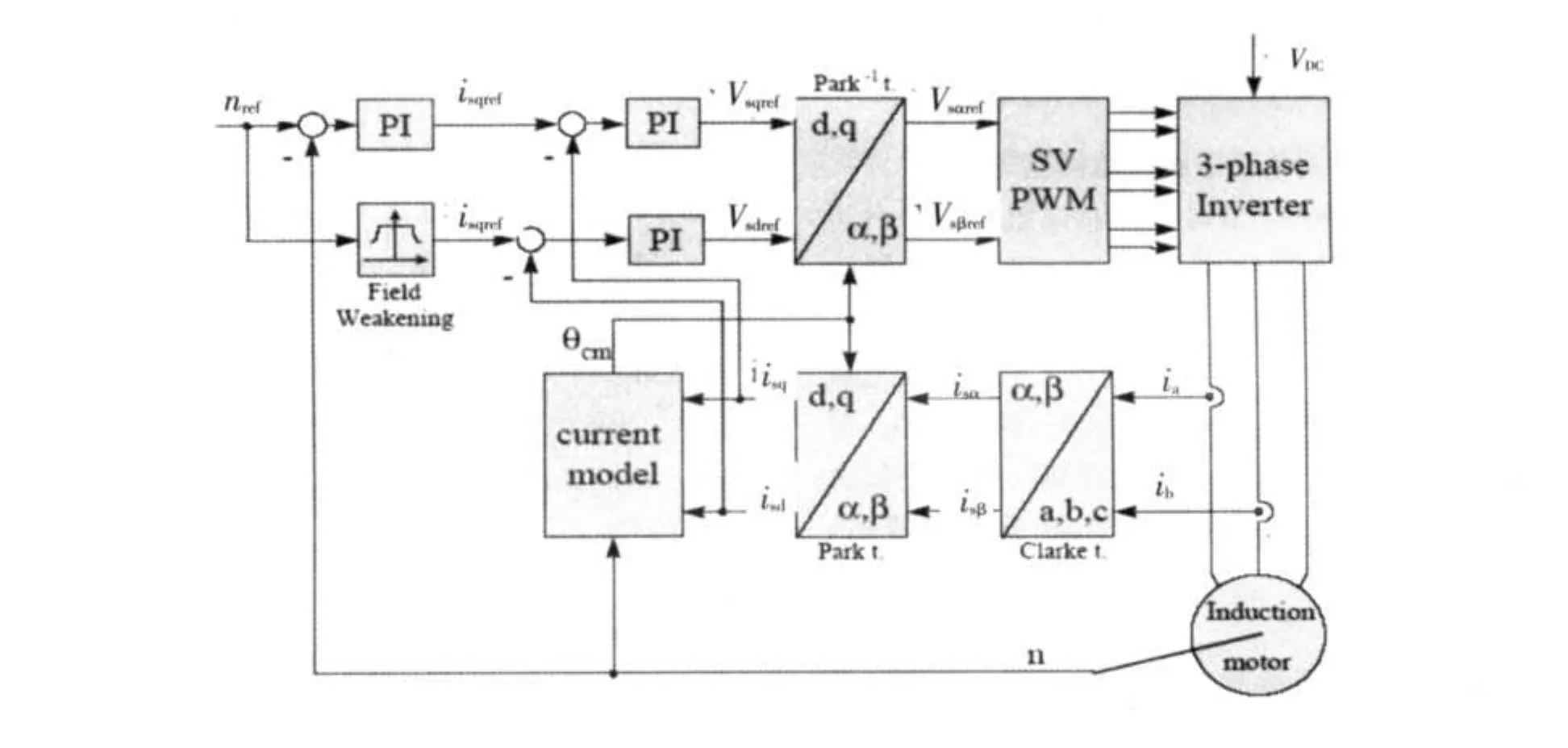
图2 异步电机矢量控制变频调速系统原理图Fig.2 The principle of variable frequency speed control system for AC Motors
速度反馈一方面用于与给定速度比较产生isqref,另一方面通过计算电角度来获得转子磁链的位置角θcm,并用于Park逆变换(Park-1)和Park变换.通过采样电机三相电流,经过坐标变换转换到转子磁链的同步坐标下,再经电流环PI调节出适当的电压矢量,经空间矢量发生器后去控制三相逆变器.绕组d(即M绕组)相当于直流电机的励磁绕组,im相当于励磁电流,q绕组(即T绕组)相当于伪静止的电枢绕组.控制使交流电机的转子总磁通Fr就是等效直流电机的磁通,则T绕组相当于伪静止的电枢绕组,it相当于与转矩成正比的电枢电流.这样的两相同步旋转坐标系就具体规定为M、T坐标系.

2.2 矢量控制基本方程式[1,4]

以上方程式中,Te为电磁转矩,np为磁极对数,Lm为dq旋转坐标系定子与转子同轴等效绕组间的互感,Lr为dq旋转坐标系转子等效两相绕组的自感,ω为转子实测的角速度信号,ω1为定子供电电压频率的同步(即旋转磁场)角速度,Tr为转子电磁时间常数,p为微分算子,代替d/dt.从上方程式中可见:转子磁链ψr仅由定子电流励磁分量ism产生,与转矩分量ist无关,从这个意义上看,定子电流的励磁分量与转矩分量是解耦的.ψr与ism之间的传递函数是一阶惯性环节,时间常数为转子磁链励磁时间常数,当励磁电流分量ism突变时,ψr的变化要受到励磁惯性的阻挠,这和直流电机励磁绕组的惯性作用是一致的.
3 三相交流异步电机磁链矢量控制变频调速系统的仿真实验结果
3.1 矢量控制变频调速系统仿真实验[6]
采用THKDSP-1型运动控制系统实验平台进行实验,PWM脉冲频率设为20 KHz,编码器为1024线,4096个脉冲/圈,系统中异步电动机参数:额定线电压Vn=220 V,额定电流In=1.5 A,最大电流Imax=10 A,额定频率fn=50 Hz,采用三角形接法,总惯量J=0.001 496 3,互感Lm=0.827 078 H,最高转速nmax=146.608rad/s,磁极对数p=2,转子相电阻RR=17.137 9 Ω,定子相电阻Rs=32.209 Ω,时间常数T=0.002 654 66 s;
PI电流调节器参数为:阻尼系数Dump_C=1和带宽PB_C=2000,使Kp=151.68、Ki=17.598;调整速度调节器的阻尼系数Dump_S=1、积分饱和度IP⁃SatS=30和带宽PB_S=200,使Kp=0.093、Ki=0.009 3.3.1.1电流速度闭环时异步电机转子磁场位置角和电流ia、ib、isd、isq波形
1)异步电机电流ia和ib波形见图3.
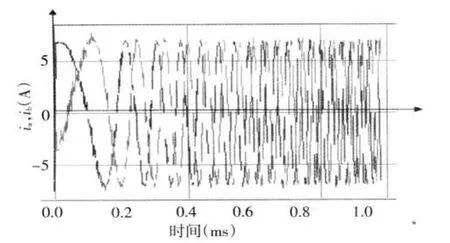
图3 异步电机电流ia和ib波形Fig.3 Waveforms of rotor electric current iaand ib
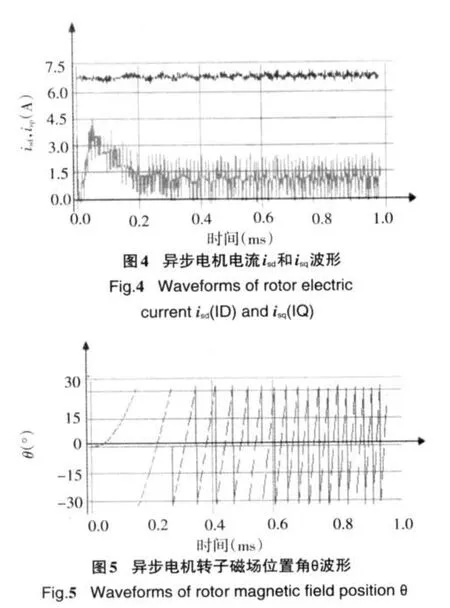
2)异步电机电流isd和isq波形见图4.
3)异步电机转子磁场位置角θ波形见图5.
3.1.2 电机实际速度ASPD和力矩电流IQ的波形
1)电机速度设定1 200 rpm.速度响应曲线见图6,电机响应时间为:0.47×140=65.8(ms).
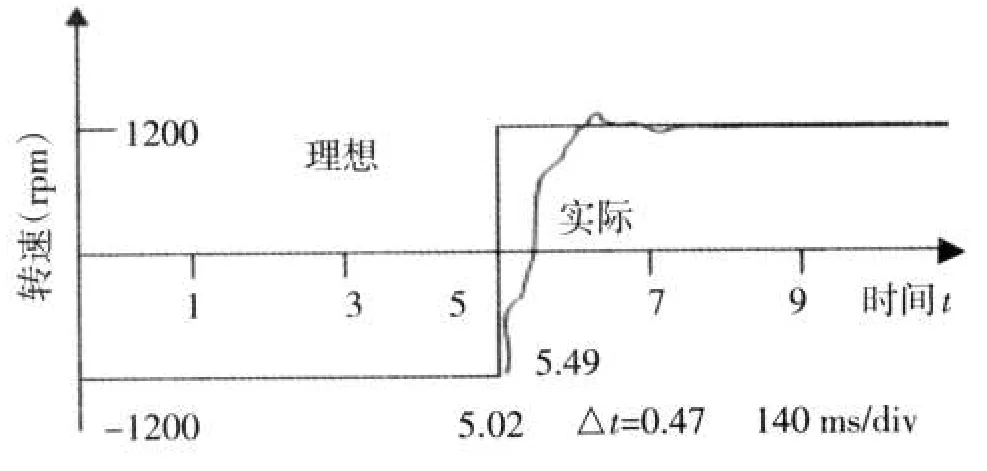
图6 电机运行在1200 rpm时的理论与实际波形Fig.6Motor actual speed waveforms and reference on load 1200 rpm
2)电机实际的力矩电流值和速度瞬时值见图7,电机速度1 200 rpm,电机在从反转到正转转向切换的瞬间,力矩电流有一个恒电流的加速过程.
4 结语
上述仿真实验结果表明,SVPWM控制应用于交流变频调速系统,可取得良好的控制性能.

图7 速度瞬时值与电机实际力矩电流值的曲线Fig.7Speed waveform and actual torque current
本文所采用的方案正确可行,性能优良,控制准确,响应迅速,控制系统具备了良好的动态性能和稳态精度.这种基于空间矢量控制的交流电机控制方法,适合于各类高性能交流电机控制系统.
[1]陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2009:145-147;176-182;196-202.
[2]李晓静,周书晴.一种基于DSP的变频调速系统的SVP⁃WM控制方法[J].电力自动化设备,2005,25(9):43-46.
[3]周卫平,吴正国,唐劲松,等.SVPWM的等效算法及SVP⁃WM与SPWM的本质联系[J].中国电机工程学报,2006,26(2):133-137.
[4]范正翘.电力传动与自动控制系统[M].北京:北京航空航天大学出版社,2003:158-167.
[5]高国燊.自动控制原理[M].广州:华南理工大学出版社,2009:62-64;102-110.
[6]薛定宇.控制系统仿真与计算机辅助设计[M].北京:机械工业出版社,2005:253-265.
SVPWM Based Variable Frequency Speed Control System for AC Motor
WEI Jiande
(College of Physics and Electronic Engineering,Hainan Normal University,Haikou571158,China;)
According to the basic principle of space vectors pulse width modulation,this paper presents a method,based on voltage space vector control technology,of variable frequency speed control for AC Motors.Vector control tech⁃nology is widely used in high-performance variable frequency speed governing system for AC motors.Compared with SP⁃WM,SVPWM(Space Vector Pulse Width Modulation)method has better control performance.The result of experiment on practical motor indicates that the proposed method is feasible.The control system has excellent dynamic and static performances and high control effect.
SVPWM;vector control technology;variable frequency speed governing;AC motor
TM 301.2
A
1674-4942(2011)01-0052-04
2010-12-29
海南省重点科技计划项目(ZDXM20100069)
黄 澜
