某型MMW/IR双模导引头数据融合系统验证平台设计*
2011-12-07刘立全景占荣
刘立全,景占荣,羊 彦,高 田
(西北工业大学电子信息学院,西安710072)
0 引言
现代精确制导武器成为打击对手的主要手段。毫米波/红外(MMW/IR)复合制导技术便是其中之一,其关键技术包括:双模导引头的一体化技术,传感器技术,高速信号处理技术。其中最重要的是信息融合(information fusion,IF)技术[1],它是双模寻的制导中精确跟踪目标的关键研究内容。
文中以实际需求为目标,介绍基于毫米波/红外双模制导技术[2]的数据融合系统的组成及工作原理,重点阐述了数据融合平台的软硬件实施方案,研究了融合算法[3]软件的总体流程。最后,通过测试仿真系统对数据融合系统进行测试、验证,得到了非常好的测试结果。
1 MMW/IR双导引头数据融合系统组成
毫米波/红外数据融合系统主要包括MMW/IR双模寻的数据融合平台、MMW/IR双模寻的数据融合测试平台两部分,整个系统的组成如图1所示。
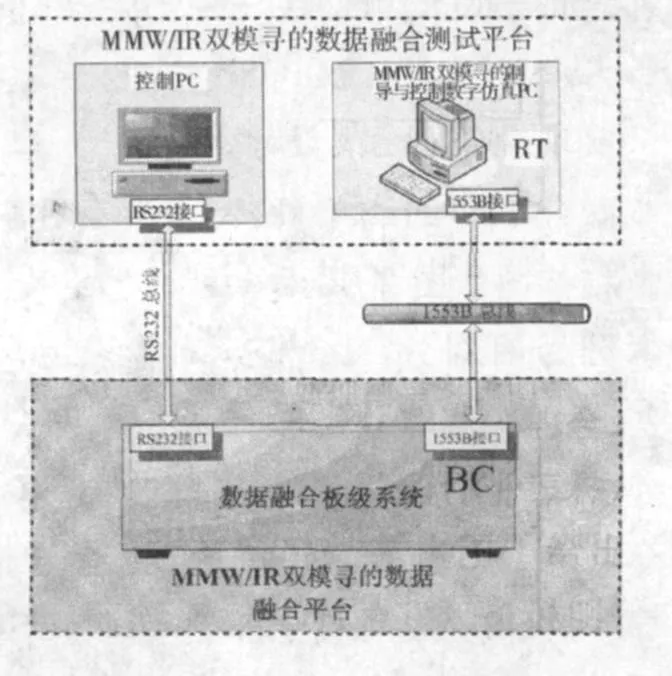
图1 数据融合系统组成逻辑图
MMW/IR双模制导数据融合平台主要是指数据融合板级系统,主要负责完成双模寻的系统之间的数据融合处理、数据转换以及系统补偿等任务,有效提高双模导引头的制导精度和抗干扰能力;数据融合平台有两路对外的通信接口,一路是1553B接口,另外一路是RS232接口。数据融合平台作为总线控制器BC(bus controller)通过1553B总线与远程终端RT(remote terminal)相连,完成与MMW/IR寻的制导与控制数字仿真PC(RT)的数据传送;通过串行总线与测试平台的控制PC进行通信,接受来自于控制PC的控制指令。
MMW/IR双模寻的数据融合测试平台主要由MMW/IR寻的制导与控制数字仿真PC以及控制PC构成,仿真PC是用于数字仿真毫米波/红外双模导引头的工作状态、导弹导航与制导全过程,数字仿真系统作为RT,仿真导弹的状态信息以及控制信息通过1553B总线传递给数据融合平台,进而对数据融合平台的性能进行测试评估。控制PC主要负责发出控制指令来控制数据融合平台和仿真PC。数据融合测试平台只是为了测试数据融合平台的性能而设计的,数据融合平台是整个数据融合系统的核心,因此文中重点研究数据融合平台,数据融合测试平台不做重点研究。
2 数据融合系统验证平台设计

图2 融合平台硬件结构图
2.1 验证平台硬件设计
根据融合系统需要完成的任务以及所需的通信接口,选择TI公司的TMS320F2812和 TMS320C6713双DSP实现融合平台的设计,融合平台的详细硬件结构图如图2所示,共分为两部分:①基于DSP阵列的数据融合板;②数据融合系统接口板(BC模式)。
1)基于DSP阵列的数据融合板结构设计
DSP阵列板上采用两块DSP作为处理芯片,TMS320F2812和TMS320C6713,TMS320F2812主要完成预处理的任务,而TMS320C6713用来进行数据融合。TMS320F2812有片上 128K×16位的FLASH存储器用来引导程序,而TMS320C6713片上没有存放引导程序的存储器,所以外扩了128K×16位的FLASH存储器SST39VF200,用于存放需加载的程序。采用了两片 16K×16位的双口 RAM IDT70V26,一片用来DSP之间的数据交换缓冲处理,另外一片用来实现TMS320F2812与1553B总线接口板的数据通讯。为了与测试设备进行通信,TMS320F2812外扩了 RS232和 RS422。

图3 数据融合板硬件构成图
电源部分采用了27V转5V的DC-DC模块,然后通过电源模块 TPS73HD318将5V转换成3.3V和1.8V,给 TMS320F2812、两片双口 RAM 以及1553B接口板供电,通过电源模块 TPS70345将5V转换为3.3V和1.2V,给TMS320C6713供电。
2)数据融合平台的1553B接口板设计
1553B接口板主要完成融合平台数据的高可靠、高速的双向传输。该部分主要由 Altera FPGA和1553B协议转换芯片构成。其中Altera FPGA内部定制了NIOS II微处理器软核,作为1553B协议管理CPU。另外,该FPGA还定制了SDRAM控制器接口、PIO内核三态桥、UART、定时器、双口 RAM 接口以及自定义的 1553B协议芯片接口。其中:SDRAM控制器接口用于连接外部SDRAM作为接口板系统的内存;PIO内核控制通用I/O口,协助1553协议芯片接口完成1553B接口逻辑,同时协助双口RAM接口控制外部双口RAM芯片;三态桥用于连接外部Flash作为程序存储器以及数据存储器;定时器用于1553B消息管理时,实现精确定时;用户自定义的1553B协议芯片接口主要实现外部1553B协议芯片接口逻辑,实现Nios II CPU对1553B芯片的控制;而UART作为串口调试接口板时备用。
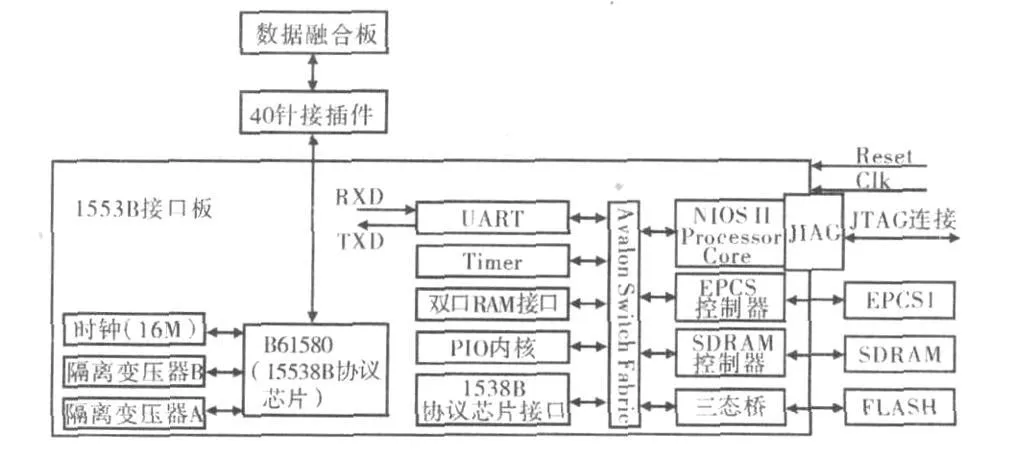
图4 1553B接口板硬件构成图
1553B协议芯片拟采用型号为B61580的多功能芯片,它除了具有远程终端(RT)功能外,还可以用作总线控制器(BC)、总线监控器(MT)。其内部功能极强,接口灵活、便于控制,有各种封装形式和供电电压供用户选择,是1553A/B等总线标准应用中较常用的接口芯片。该芯片的工作模式由初始化软件设定。
2.2 数据融合软件系统框架研究
数据融合系统软件总体框架如图5所示。该软件系统主要完成两方面的工作:一是数据融合板软件系统主要负责数据调理以及数据融合跟踪;二是1553B接口板软件系统,主要负责处理、打包发自数据融合板的数据以及处理、解包来自1553B总线的数据。

图5 数据融合软件总流程图
1)数据融合算法功能模块
该部分包括数据调理和数据融合跟踪两部分。数据调理部分包括进程控制软件,数据收发软件,控制帧形成软件和数据打解包软件。数据融合跟踪主要包括融合模式判断软件,数据置信度判断软件,协方差计算软件,时空对准软件,数据关联软件,数据融合跟踪软件,随动信号计算软件等。
在F2812平台上,进程管理软件主要负责F2812与外界(控制计算机、仿真计算机和C6713)交换数据的调度管理。数据收发软件负责读写控制命令(来自控制计算机)、数据帧(雷达数据帧,红外数据帧和融合控制帧)、控制帧和状态帧。控制帧是F2812根据接到的控制命令形成的。最后,数据打解包软件对接收到的`雷达红外输出数据帧解包,同时对读取的融合控制帧打包。进程控制软件是核心,其他软件都是作为子函数通过进程管理软件调用实现的。
在C6713平台上,进程管理软件同样是核心,调用其他软件完成数据融合跟踪任务。融合模式判断软件判断当前融合应该切换至哪种模式(点迹融合模式或航迹融合模式);然后,数据置信度判断利用信噪比或阈值判断导引头数据是否可信;如果可信就利用信噪比和阈值推算数据融合所需要的协方差值;数据融合跟踪算法包括点迹融合和航迹融合,随动信号计算软件则利用融合跟踪得到的目标估计位置计算出双模导引头光轴和电轴的随动大小值,最后,生成融合控制帧数据。
2)1553B接口板软件系统
1553B总线系统的软件设计针对于OSI模型中的传输层,传输层在整个模型系统中占有非常重要的地位,传输层是整个协议层次结构的核心,是唯一负责总体数据传输和控制的一层。因此传输层软件设计在整个1553B总线系统设计中占有相当重要地位。针对传输层的功能特点,进行1553B总线系统软件设计。
主要包括三部分设计:Bootloader设计、主程序设计以及中断子程序设计。
Bootloader:主要包括FPGA本身的初始化配置以及Nios II本身的引导过程。FPGA器件在自身携带的配置控制器的控制下配置FPGA的内部逻辑,同时内部逻辑里已经包含了Nios II软核;FPGA配置成功后,Nios II就被逻辑中的复位电路复位,从reset地址开始执行代码,在应用程序开始执行之间,执行一小段代码负责从Flash中加载应用程序到内存SDRAM 中,在SDRAM中运行应用程序,从而提高了运行速度。
主程序运行:主程序主要包括B61580的初始化配置以及一个无限循环程序。对于B61580的初始化主要把B61580配置成总线控制器(BC),对1553B总线系统的消息进行处理,初始化后,进入无限循环,等待中断的发生,处理中断。
中断子程序:中断子程序主要包括两个:一个是来自于B61580的中断,另一个是来自于与数据融合板接口的双口RAM的中断。这两个中断子程序是1553B总线系统软件设计的核心,这两个子程序共同完成了1553B消息转换与处理功能。
3 数据融合平台的测试评估
双模导引头数据融合平台验证的指标有三个:双模导引头数据融合能够提高导引头截获目标距离,提高导引头跟踪目标的精度和提高导引头的抗干扰能力。因此,制定了如下的系统评估准则。
1)导引头截获目标的距离评估
当导引头转入稳定跟踪目标时刻,弹-目之间的距离就是导引头截获距离。评估准则:与单模数据处理相比,双模导引头能够提前截获目标,进入稳定跟踪。
2)导引头跟踪目标精度评估
跟踪目标精度主要从两个方面来体现,位置跟踪精度和角度跟踪精度。一般情况下,精度大小主要从两个方面表现:跟踪误差的大小和误差方差大小。由于导引头的观测误差设置为时变量,所以误差的方差不具有可比性,所以方案只采取跟踪误差评估。
评估准则:与单模数据处理相比,双模导引头融合跟踪误差和误差方差都相应的减小。
3)导引头的抗干扰能力评估
双模导引头抗干扰能力主要体现两方面:第一个方面,当其中一种导引头被干扰时,双模导引头可以采用一种导引头管理机制,降低这个导引头在数据融合中心的权值,或是利用另外一个导引头的观测数据帮助其去除干扰,或是切换成单模状态,继续跟踪目标;并且当干扰消除后,又能及时切换成双模跟踪状态,实现对目标精确稳定的跟踪。
评估准则:红外导引头的干扰主要体现在多目标(一种干扰类型),雷达导引头是否可以帮助其及时分辨出真目标;毫米波雷达的干扰主要体现在阻塞式干扰(强功率干扰),不能正确检测到目标,此时双模导引头是否可以工作在红外单模式跟踪,并当毫米波雷达干扰消失后,系统能否继续切换至双模融合模式。
4 系统仿真与测试
基于以上的评估准则,采用蒙特卡洛方法对主要性能进行了仿真。为了目标选择的典型性,选择目标运动类型为:机动曲线运动,初速度为(340,100,0)m/s;目标加速度为(0,AY,0)m/s2,目标状态噪声σ2v为(100,100,100)m/s2,其中 AY=-10sin(0.1*Number*Time_step);Number为雷达数据帧次序编号;Time_step为仿真步长,仿真中Time_step取5ms。数据处理采用当前统计模型进行预测。雷达单模模式下,目标截获距离为11154.2m,双模融合模式和抗干扰双模融合模式同为13737.4m,在目标曲线运动情况下,双模导引头数据融合处理相对单模模式将目标截获距离提高了2583.2m。另外,根据仿真结果可以看出,目标在机动飞行时,双模导引头数据融合处理可以明显的提高跟踪精度,位置和角度精度都提高了2~3倍。通过仿真试验表明,双模导引头数据融合处理基本适应红外导引头多目标、雷达导引头强功率干扰。
5 结论
文中针对某型装备MMW/IR双导引头数据融合装置性能指标及其特殊需求,提出了基于1553B总线传输的毫米波/红外双模数据融合系统的硬件结构方案,设计了数据融合验证平台的软硬件结构,研究了该系统的核心部分——算法整体框架,制定了数据融合平台的测试评估准则。另外,根据系统的评估准则,利用测试平台进行了仿真与测试。验证结果表明:所设计的系统既满足了实际系统的需求,体现了全系统的最优性,也验证了数据验证算法的有效性。对工程实践具有很好的借鉴意义。
[1]艾薇,刘峥.雷达/红外复合导引头信息融合技术研究[J].航空兵器,2007(4):30-33.
[2]张婷.红外/毫米波复合制导数据融合技术研究[D].西安:西安电子科技大学,2007.
[3]胡晓军,倪震明.毫米波/红外复合制导技术概述[J].制导与引信,2007,28(4):8-12.
