特殊传感器的共线方程及几何纠正
2011-11-29伍素贞方子岩莫志恒
伍素贞 方子岩 莫志恒
(1.广东省地质测绘院,广东广州 510800;2.东南大学,江苏南京 210096;3.深圳岩土综合勘察设计有限公司,广东深圳 518172)
框幅式航空摄影机成像瞬间为一个面,因而称为框幅式,是最常见的一种传感器。物点A(X,Y,Z)、构像点 a(x,y)和投影中心 S(XS,YS,SS)按光(电磁波)的直线传播原理3点共线,设该航摄像片在空间摄影瞬间的姿态用φωκ描述,主距为f,可以写出中心投影构像方程式——共线方程
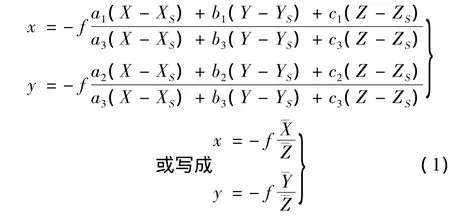
在遥感中,有许多结构特殊的传感器,通过分析,也可以写出相应的共线方程,继而以此为纠正变换函数,进行遥感影像的几何纠正。
1 特殊传感器(点中心投影周期转动圆弧线影像)的共线方程
在航空遥感中常用的红外行扫描仪是利用光学系统的机械转动和飞行器向前飞行的两个方向相互垂直的运动,形成对地物目标的二维扫描,逐点将不同目标物的红外辐射功率汇集到能将其能量转变成电信号的光电转换器件——红外探测器上。如图1所示,这里采用的是一种点(像元素)扫描方式,每个投影瞬间是点中心投影,任一像点坐标a'(0,0),即每个成像瞬间的点坐标就是坐标原点。
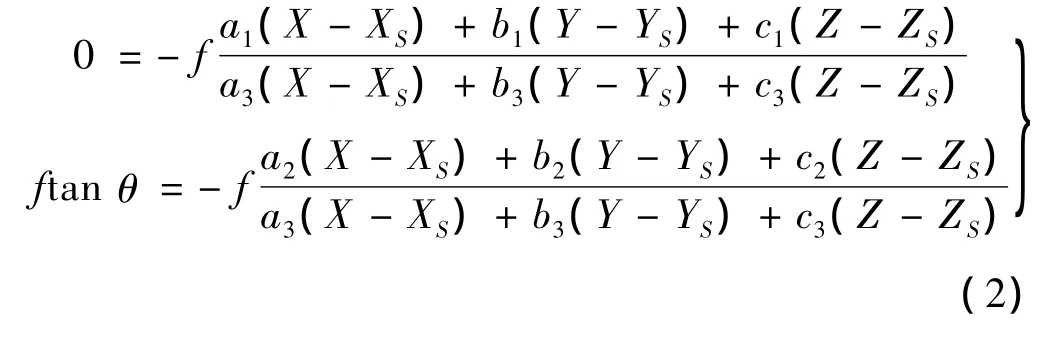
一个扫描周期的点影像构成一弧线,不方便讨论其构像方程,现过弧线影像中心的等效主距作一直线与弧线相切,按中心投影把弧线上的点投影到直线上,地面物点A在弧线上的构像坐标a'(0,0),直线上的相应点坐标a(0,f tanθ)。对照(2)式,可以写出描述物点A、像点a和投影中心S共线的数学表达式
2 间接法影像纠正
间接法(也称反解法)纠正成图方案,是从空白的输出图像阵列(标准空间)出发,亦按行列的顺序依次对每个输出像元点位反求其对应于原始图像(畸变空间)中的坐标位置
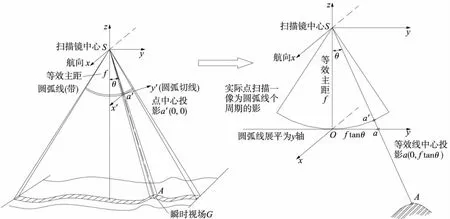
图1 点扫描成像

(3)式是间接纠正变换函数。用标准空间中的“空”像元坐标(X,Y)按间接纠正变换函数,计算得到相应的原始图像(畸变空间)坐标(x,y),不一定刚好落在原始图像阵列像元中心,因而没有明确的灰度值。解决的方法是进行灰度重采样,例如采用双线性内插法重采样。间接成图法的基本思想如图2所示。
(3)式的具体形式因需要而定,结合本文的研究,采用(2)式的共线方程作为纠正变换函数进行数字微分纠正。纠正是基于DEM的三维数字微分纠正,也就是通过每个地面点坐标(X,Y,Z)按(3)式计算相应的影像坐标,实现反解法三维数字微分纠正,获得正射数字摄影DOM。
3 三维数字微分纠正
图2 间接成图法
三维数字微分纠正,是根据传感器成像公式并考虑地面起伏对每一个像元影响的严密纠正方法,通常采用共线方程作为间接纠正变换函数进行数字微分纠正。共线方程纠正建立在图像坐标与地面坐标严格数学变换关系基础上,对构像空间几何形态直接描述,对传感器成像时的位置和姿态进行模拟,以地面点、传感器镜头中心和像点三点共线为条件。该方法纠正过程需要有地面高程信息(DEM),可以改正因地形起伏而引起的投影差,并使纠正变换函数(这里为共线方程)中的Z为已知。三维数字微分纠正能够得到正射影像。共线方程(1)和(2)都是相应图像进行数字微分纠正用到的纠正变换函数。框幅式影像的外方位元素可以通过像控点做空间后方交会得到,因而数字微分纠正可以顺利进行;特殊传感器影像因其外方位元素不易求得,往往采取近似的方法逐渐趋近来得到,纠正过程相对复杂。
4 特殊传感器的共线方程及几何纠正
对于点(像元素)扫描方式,每个投影瞬间是点中心投影,即(2)式

其中 XS,YS,ZS,φ,ω,κ(注意,式中9个方向余弦是3个角元素的函数)合称为该扫描点的外方位元素。在飞行方向,可用x值反映随时间变化的点扫描线,对某个时刻扫描线的外方位元素,可表示成像幅中心扫描线外方位元素 XS0,YS0,ZS0,φ0,ω0,κ0及外方位元素变化量的函数

式中,ΔXS、ΔYS、ΔZS、Δφ、Δω、Δκ 为外方位元素随时间(这里用x值予以对应)线性变化量。x为a点所在扫描线到中心扫描线的距离,即a点在整幅图像上x方向(飞行方向)的像片坐标(必需是飞行方向的坐标,该坐标随时间而变化)。任意地面点所对应构像点的外方位元素是未知的,它需由所对应的像点坐标x按(4)式来计算,而像点坐标x又是待定的。因此,不可能如同框幅式中心投影那样,直接由共线方程(在这里是间接法纠正变换函数)解算出像点的影像坐标,而应是一个迭代解算的过程。

迭代解算的基本思想是:对欲求的x来说,先给定一近似值x0(一般为0),代入(4)式计算出该点的外方位元素,然后将外方位元素代入(2)式的第一式,如果此时的x0是正确的,则(2)式的第一式,其等式应成立;否则利用等式右边算出的Δx修正原近似值x0,即式中,i为迭代次数,重复此过程,直到不大于给定的限差,迭代计算结束。每当由DEM提供一个地面点三维坐标,都要按上述过程计算对应于该地面点的像点坐标x。因此,x是依据(2)式不断迭代求得的,迭代的过程是每迭代一次由(5)式得到一个新x值,代入(4)式得到新的外方位元素值 XS、YS、ZS、φ、ω、κ,再代入(2)式的第一式去判断是否成立。重复此过程,直到不大于给定的限差,迭代计算结束。根据迭代计算出的x坐标就是纠正变换函数要求的原始影像坐标,再将此刻计算的外方位元素 XS、YS、ZS、φ、ω、κ,结合该点的地面坐标,由(2)式的第二式的右边计算出相应的改化坐标,并通过改化坐标y¯求得原始影像坐标y。显然

上述计算得到的像点坐标(x,y)除以像元尺寸并作坐标原点的平移后,作为双线性内插的依据,以确定纠正点的灰度,从而实现基于特殊传感器共线方程的几何纠正。基于共线方程的数字微分纠正原理如图3所示。
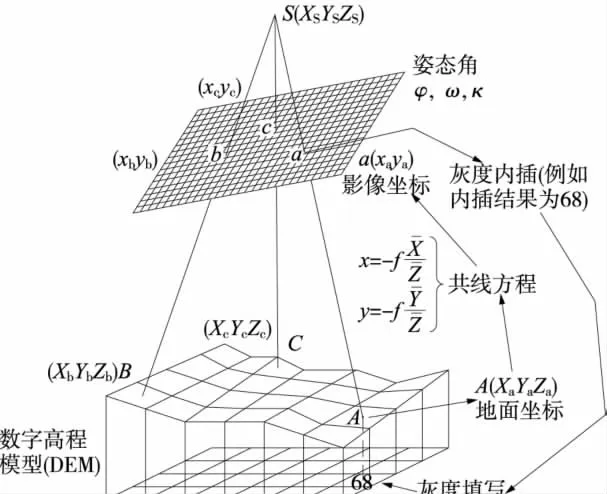
图3 基于共线方程的数字微分纠正原理
5 结论
(1)共线方程纠正建立在图像坐标与地面坐标严格数学变换关系基础上,是对构像空间几何形态的直接描述。它对传感器成像时的位置和姿态进行模拟,以地面点、传感器镜头中心和像点三点共线为条件。该方法纠正过程需要有地面高程信息(DEM),可以改正因地形起伏而引起的投影差。因此,当地形起伏较大,且多项式纠正的精度不能满足要求时,要用共线方程进行纠正。共线方程纠正是真正意义上的三维数字微分纠正,能够得到正射影像。
(2)几何纠正改变像元位置,涉及灰度重采样时,应尽量选择精度高的内插方法,以保证图像质量。数字图像几何纠正虽然涉及灰度重采样,但对一幅图像实际的灰度状况没有实质性的改变。只是标准空间和畸变空间像元位置之间的变换,原始图像的反差决定了输出图像的反差。而“遥感数字图像增强处理”才是专门对图像灰度进行操作变化的理论和技术,两者是截然不同的概念。
(3)这里介绍的特殊传感器,红外行扫描仪(点中心投影周期转动圆弧线影像)中心投影瞬间为一个像元素影像,在一个摆动周期内每个像元素的姿态角φωκ各不相同。该像元素就是影像坐标系原点,所以x和y都为0,在一个摆动周期内影像坐标系原点构成一条弧线影像,须展平后才能对照写出共线方程。要注意方向余弦aibici(i=1,2,3)是φωκ的函数,所以在用共线方程解决具体问题时,其数据处理和应用将比面中心投影框幅式影像复杂得多。
[1]李德仁,周月琴,金为铣.摄影测量与遥感概论[M].北京:测绘出版社,2001
[2]方子岩,项仲贞.摄影测量学[Z].南京:东南大学,2010
[3]方子岩,郑天赐.线阵列传感器影像三维信息提取技术[J].测绘通报,2009(增刊)
[4]项仲贞,方子岩.摄影测量与遥感所用的传感器类型及构像方程[J].铁道勘察,2011(1)
