转向工况的整车悬架动力学仿真
2011-11-22陈建国鲍武
陈建国,鲍武
(湖北汽车工业学院 机械工程系,湖北 十堰442002)
由于车辆的4个车轮同时受到路面的激励,会产生垂向、俯仰和侧倾运动,悬架簧上质量的振动是各个车轮引起振动的耦合;特别在转向工况下,车身的侧倾会加剧,影响汽车乘坐的舒适性和转向的稳定性。汽车悬架的振动,是耦合的多入多出(MIMO)系统。由于整车模型的参数较多,多数学者在研究悬架振动时采用1/4车辆模型[1-2]和 1/2车辆模型[3],1/4车辆模型不存在耦合,1/2车辆模型没有侧倾运动,这些模型无法反映车辆在转向工况下的振动情况,与实际情况有一定差距。
本文建立整车的动力学模型,分析车辆在前轮转角及车速变化时悬架簧上质量的振动,为悬架参数的设计和减振控制提供依据。
1 系统模型的建立
1.1 整车主动悬架模型
整车主动悬架模型如图1所示。
考虑车身侧倾的影响,汽车转向运动方程[4-6]为

簧上质量的俯仰运动方程为

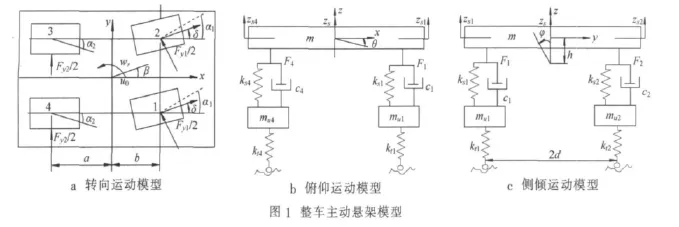
簧上质量的侧倾运动方程为

簧上质量的垂直运动方程为

簧下质量的垂直运动方程为
当俯仰角θ、侧倾角φ在小范围内时,近似有

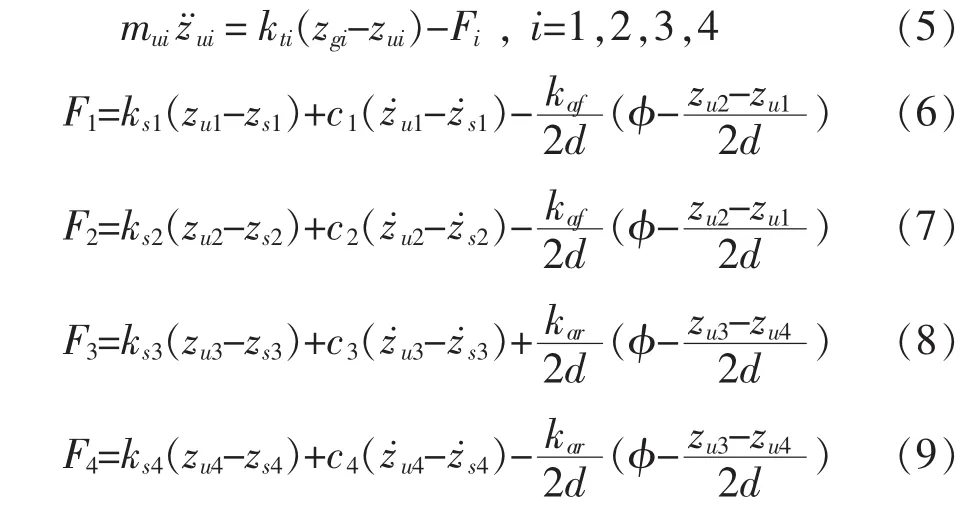
式(1)~(10)中:m,ms,mui—整车质量、悬架的簧上质量、簧下质量(轮 i处);u0—车速; β, β˙—质心侧偏角、侧偏角速度;wr—横摆角速度;Fy1—前车轮总侧偏力(两轮);Fy2—后车轮总侧偏力(两轮);ksi—悬架刚度 (轮 i处);kaf,kar—前后悬架横向稳定杆刚度;kti—轮胎刚度(轮 i处);Ix,Iy,Iz—车身侧倾转动惯量、俯仰转动惯量、横摆转动惯量;a,b—前轮到质心距离、后轮到质心距离;h—侧倾中心高度;d—1/2 轮距; φ,φ˙,φ¨—车身侧倾角、侧倾角速度、侧倾角加速度;θ,θ˙,θ¨—车身俯仰角、俯仰角速度、俯仰角加速度;zs,z˙s, z¨s—簧上质量垂向位移、垂向速度、垂向加速度;zui,z˙ui,z¨ui—簧下质量垂向位移、垂向速度、垂向加速度;zgi—路面激励;F1,F2,F3,F4—悬架对车身的作用力;ci—被动悬架阻尼系数。
1.2 轮胎模型
在小转角条件下,轮胎特性可认为是线性的,若考虑侧倾影响,则轮胎侧偏力[7]为

式中:k1,k2—前轮胎侧偏刚度、后轮胎侧偏刚度;α1,α2—前轮胎侧偏角、后轮胎侧偏角;Ef,Er—前侧倾转向系数、后侧倾转向系数;δ—前轮转角。
1.3 路面激励信号的生成
根据文献[6,8],用以下滤波方程作为路面随机激励的时域数学模型:

式中:G0—路面不平度系数;ξi—零均值Gauss白噪声;f0—下截止频率。
综合以上整车模型、轮胎模型、路面模型,取系统的状态变量为

取系统的输出变量为

则系统的状态方程和输出方程可写成:

式中:A—系统矩阵;B—输入矩阵;C—输出矩阵;U(t)—输入矢量;δ—输入常量。
2 仿真
在MATLAB中对上述建立的系统进行了仿真。
仿真所用的参数采用文献[6]中的参数:


仿真时间为10 s,仿真步长0.01 s,采用四阶龙格库塔算法ode45解微分方程组(13),分别仿真了前轮转角δ和车速u0变化时,车身的振动情况:
1) δ分别取 5°,10°,15°
在仿真的过程中,车身俯仰角曲线与垂向位移变化不大。图2b只绘制了δ为10°时的垂向加速度曲线。
图2以及表1表明,当前轮转角增大时,车身侧倾角的稳态值、横摆角速度稳态值、垂向振动加速度的均方根值增大。
2) 车速 u0分别取 10 m·s-1,20 m·s-1, δ取 10°
由图3及表2可知,随着车速加快,车身的侧倾角、横摆角速度超调量、垂向振动加速度加大,振动加剧。
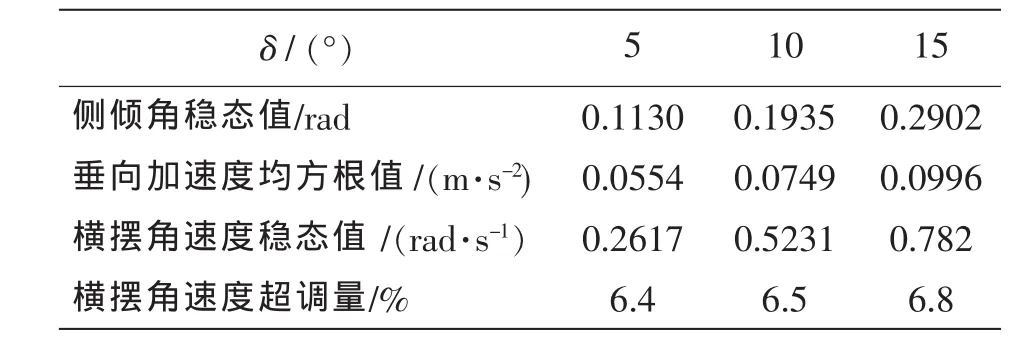
表1 变化时的仿真结果比较

表2 车速变化时的仿真结果比较


3 结论
论文建立了转向工况下的整车动力学模型,对车辆前轮转角及车速变化时车辆振动情况进行了仿真。结果表明:随着前轮转角加大,车辆侧倾角、横摆角速度、垂向振动的加速度增大;随着车速的提高,横摆角速度的超调量、横摆角速度、侧倾角、垂向振动加速度增大。转向工况下的动力学仿真为车辆参数设计和减振控制提供了参考和依据。
[1]李以农,郑玲.基于磁流变减振器的汽车半主动悬架非线性控制方法[J].机械工程学报,2005,41(5):31-36.
[2] Christophe Lauwerys,Jan Swevers,Paul Sas.Robust linear control of an active suspension on a quarter car test-rig[J].Control Engineering Practice,2005,13:577-586.
[3] R.S.Prabakar,C.Sujatha,S.Narayanan.Optimal semiactive preview control response of a half car vehicle [J].Journal of Sound and Vibration, 2009(326):400-420.
[4] Yoshimura T,Emoto Y.Steering and suspension system of a full car model using fuzzy reasoning based on single input rule modules [J] .Int.J.of Vehicle Autonomous Systems,2003,1(2):237-246.
[5] XIAO Hansong,CHEN Wuwei,ZHOU Huihui.Integrated controlofactive suspension system and electronic stability programme using hi erarchical control strategy theory and experiment [J].Vehicle System Dynamics,2011,49(1):381-397.
[6] 王启瑞,刘立强,陈无畏.基于随机次优控制的汽车电动助力转向与主动悬架集成控制[J].中国机械工程,2005,16(8):743-747.
[7] 余志生.汽车理论[M].北京:机械工业出版社,1990.
[8]张永林,钟毅芳.车辆路面不平度输人的随机激励时域模型[J].农业机械学报,2004,35(2):9-12.
