基于状态观测器的永磁同步电动机超低速控制
2011-11-20谢红普
谢红普,李 宏,郑 勇
(西北工业大学,陕西西安710072)
0 引 言
永磁同步电动机(以下简称PMSM)具有结构简单、体积小、功率密度高、控制性能优越等诸多优点,因此被广泛应用于航空、航天、工业等[1]高性能控制领域。为了实现永磁同步电动机控制系统的高精度、高动态性能控制,闭环控制系统检测到的转子位置和转速必须是实时和精确的。目前,普遍采用增量式光电编码器来检测转子位置,然后通过对位置的微分得到转子转速[2]。受转子位置测量精度和量化误差的影响,直接微分得到的转速值往往有较大的误差并且包含大量的微分噪声,所以,常常还需要使用低通滤波器来滤除这些噪声,但是这样又造成了速度检测的相位延迟和误差的进一步扩大,尤其是在低速条件下,这种延迟和误差甚至会导致控制系统振荡。因此,基于增量式编码器瞬时测速方法的研究是十分必要的[3]。
针对上述通过直接对转子位置微分得到平均转速值的缺陷,本文采用状态观测器观测转子的瞬时位置和转速。增量式编码器的精度有限,在超低速下送入状态观测器的转子位置信息得不到及时的更新,状态观测器的精度会受到影响,因此,本文提出了一种进一步改善低速性能的角度补偿措施。
1 平均测速方法分析
基于增量式编码器的常用平均测速方法有:
(1)M法[4]。即记取一个采样周期内旋转编码器发出的脉冲个数来计算出转速的方法。其误差率最大值δmax:

式中:TC为采样周期,μ s;M1为时间TC内的脉冲个数;Z为旋转编码器每转输出的脉冲个数。
这里给定转速曲线为斜坡函数,TC=400 μ s;Z=2 500个/转。从式(1)可知,当M1=0时,δmax趋近于无穷大,此时测出的转速没有意义。从图1中可以看出,当转速低于某一值(仿真结果为15 r/min)时,在一个采样周期内可能检测不到编码器脉冲,即M1=0;因此,当采用M法测速时,电机在15 r/min以下将不能良好的运行。
(2)T法。即测出旋转编码器两个输出脉冲之间的间隔时间来计算出转速。图2为采用T法测速的转速曲线图。转速越低,测速精度越高,但延时也随之增加,经计算可知,当转速为1 r/min时,延时为3 ms,相当于增加了一个大的惯性环节,这会使控制系统的稳定性变差,甚至会导致系统无法正常运行。
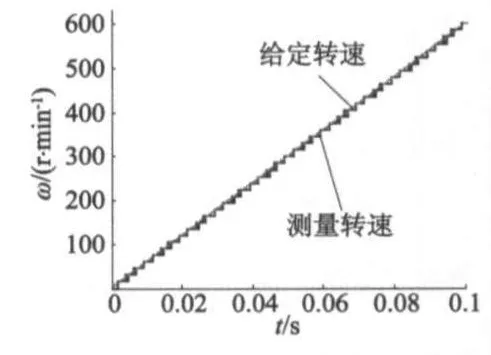
图1 M法测速曲线图

图2 T法测速曲线图
(3)M/T法。综合M法和T法产生的M/T法在低速阶段与T法类似,同样有延迟过大而导致控制系统振荡的缺陷。图3为采用M/T法测速的转速曲线图。

图3 M/T法测速曲线图
从以上的分析及仿真结果可知,当采用基于增量式编码器的常用平均测速方法时,电机在极低转速下将不能良好的运行。
2 状态观测器的设计
PMSM的机械模型如图4所示。机械运动方程可表示:


图4 PMSM的机械模型
式中:ω为转子机械角速度;θ为转子机械位置;Bm为摩擦系数;Jm为转动惯量;Te为电磁转矩;Td为负载转矩。
假定负载转矩Td在电机实际运行过程中为恒值,即:

选取转子机械角速度ω、转子机械位置θ和负载转矩Td为状态变量,则PMSM机械模型的状态方程可写为:

式中:

根据式(4)设计全维状态观测器,其动态方程可表示:

式中:L=[l1l2l3]T
引入状态观测器后的电机模型如图5所示。

图5 状态观测器结构图
这里,θ为增量式编码器输出的转子位置。从图5中可以看出,状态观测器的基本原理是取角度的实际值和观测值的差值与增益矩阵L的积作为修正项,反馈到重构系统中,使得估计状态逐渐趋近真实状态。
3 超低转速下补偿措施的设计
当电机在超低转速下运行时,由于光电编码器的精度有限,输入状态观测器中的转子位置信息必然得不到及时的更新,此时观测器的输出值的精度会受到影响。
为了解决上述问题,本文提出了一种基于转子位置的补偿方法,即通过以前的转子转速信息预测现在的转子位置[7]。设系统转子位置信息运算周期为T,在第N1个脉冲与第N2个脉冲的时间间隔为t1,第N2个脉冲与第N3个脉冲的时间间隔为t2,则在t1时间内位置信息的运算周期数为在t2内的运算周期数为;预测第N3个脉冲与第N4个脉冲的位置信息运算周期数为p3=p2+(p2-p1);则在第N3个脉冲与第N4个脉冲之间的每个运算周期内角度增加为为编码器的分辨率);在第N4个脉冲到来之前,若角度值达到了第N4个脉冲表示的角度,则输入观测器中的角度值保持不变,直到第N4个脉冲到来,如图6a所示;若第N4个脉冲到来时,角度值仍未增加到第N4个脉冲表示的角度,则输入观测器中的角度值为第N4个脉冲表示的角度,如图6b所示。依次递推,直到在一个运算周期内检测到的脉冲数大于1。采用此方法简单易行且不必增加任何硬件。

图6 角度补偿的两种情况示意图
4 仿真模型的建立及结果分析
采用Matlab/Simulink搭建了控制系统的仿真模型,如图7所示,PMSM采用空间矢量脉宽调制(SVPWM)方法控制,并令id=0。电机仿真参数:定子绕组相电阻R=0.958 5 Ω;直轴电感Ld=0.00525 H,交轴电感Lq=0.005 25 H;永磁体磁链ψ=0.182 7 Wb;转动惯量Jm=0.632 9×10-3kg·m2;摩擦系数Bm=0.303 5×10-3N·m·s;极对数p=4;开关管开关频率f=10 kHz;逆变器输入直流侧电压Ud=300V;模拟编码器线数N=2 500,经四倍频为10 000线。

图7 状态观测器PMSM调速系统仿真模型
如图8所示,PMSM分别采用M法、T法在50 r/min时的转速曲线图。从图中可以看出,在50 r/min时,无论采用M法还是T法测速,电机调速性能都变得很差。从图9可以看出,当采用状态观测器法测速时,PMSM在50 r/min有较好的调速性能,其稳态误差小于0.2 r/min。

图8 50 r/min时的转速曲线图

图9 50 r/min时采用观测器法的转速曲线图
图10a为在给定转速为1 r/min时PMSM采用状态观测器法测速的转子位置曲线图。图10b为此时的转速曲线图,可以看出,送入控制系统的转子位置估计值相对于实际值已有较大的误差,这是因为编码器的精度有限,转子的位置信息在设定的转速下得不到及时的更新;同时转速也随着编码器位置脉冲的周期而发生周期性变化。图10c与图10d为采用角度补偿措施后的转子转速和位置曲线图,转速给定为1~3 r/min,可以看出估计的转子位置和调速性能均得到了很好的改善;验证了该方法的可行性。

5 结 语
本文从PMSM的数学模型出发,建立了基于状态观测器测速的仿真模型,验证了采用状态观测器估计转子的瞬时转速和位置是可行的,并与常用的平均测速法进行了比较分析;仿真结果表明,本文提出的方法优于常用的平均测速法,能较好地满足控制系统在超低速下高精度和高性能控制的要求。针对在超低转速下输入状态观测器中的转子位置信息得不到及时的更新而使观测器的输出值的精度受到影响的问题,本文提出了一种简单易行且不用增加任何硬件的补偿方法,仿真结果表明该方法能明显改善PMSM的超低速性能。
[1] 唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,1997.
[2] Kickul H,Kwanghee N.A disturbance torque compensation scheme considering the speed measurement delay[C]//Industry Applications Conference.1996,1:403-409.
[3] Batzel T D,Lee K Y.Slotless permanent magnet synchronous motor operation without a high resolution rotor angle sensor[J].IEEE Transactions on Energy Conversion,2000,15(4):366-371.
[4] 阮毅,陈维钧,陈伯时.运动控制系统[M].北京:清华大学出版社,2006:64-68.
[5] 阙志宏,罗建,史忠科.线性系统理论[M].西安:西北工业大学出版社,1994:175-176.
[6] Petrella R,Tursini M,Perett L,et al.Speed Measurement Algorithms forLow -Resolution Incremental EncoderEquipped Drives:a Comparative Analysis[J].International Aegean Conference,2007:780-787.
[7] Yang S,Ke S.Performance Evaluation of a velocity Observer for Accurate Velocity Estimation of Servo Motor Drives[J].Industry Application Society annual meeting,1998(3):1697-1702.