基于Bernese GPS软件的GPS数据自动解算系统的研究
2011-11-15程传录王小瑞
韩 菲,程传录,王小瑞
(国家测绘局大地测量数据处理中心,陕西西安710054)
基于Bernese GPS软件的GPS数据自动解算系统的研究
韩 菲,程传录,王小瑞
(国家测绘局大地测量数据处理中心,陕西西安710054)
针对高精度GPS数据处理软件操作的复杂性,研发出一套基于Bernese GPS的GPS站网数据自动处理系统AUTO-BGPS。简单介绍Bernese5.0的数据处理原理,着重介绍其BPE功能,阐述AUTO-BGPS自动解算系统的结构设计、功能模块及数据处理过程。通过应用实例验证该软件的可用性。
Bernese5.0;BPE;自动处理;AUTO-BGPS;PPP;双差
一、引 言
随着GPS技术的不断发展,它在工程领域的应用越来越广泛。GPS技术是一种相对复杂的应用性技术,它包括天文物理、地球科学等较广范畴的知识,尤其是对于高精度的GPS数据处理,需要技术人员具备一定的专业知识。目前国际上比较成熟的高端GPS精密应用软件有美国喷气推进实验室(JPL)的JIPSY-OASIS、瑞士伯尔尼大学(AIUB)的Bernese、美国麻省理工学院和美国斯克里普斯海洋地球研究所(MIT/SIO)的GAMIT/GLOBK等,这些软件的特点之一就是数据处理模型复杂,对误差改正的研究非常精细,适合于科学研究。正是这些原因,导致其在使用过程中,人机交互的内容过多,处理过程不够直观,影响了它们在工程领域的应用。
在工程应用中,基于GPS中长基线数据,要求高精度、高可靠性的商业用户越来越多,如高速铁路的首级控制网——CP0的解算、国家高等级的GPS控制网的联合解算、连续运行参考站网络数据日常处理[1]等,这些工作都亟待一种如 GAMIT、Bernese这样既适用于长基线、高精度计算又适合生产作业的软件出现。
Bernese GPS软件是由伯尔尼大学天文研究所开发的GPS高精度数据处理软件[2-3]。该软件的应用对象主要是科研人员、负责高精度GPS测量的机构、负责连续运行站GPS接收机的机构等[1,4]。它不仅是一套具有高精度的功能强大的GPS数据处理软件,而且其高度模块化的软件结构以及开放的源代码,也为科研人员利用Bernese作进一步的研究提供了平台[3]。
二、Bernese软件概述
Bernese GPS以双差处理为主,用双差相位观测进行高精度的测地应用。其核心程序语言是Fortran77,个别程序用Fortran90[5-6]。Bernese软件的主程序大概有20个,核心程序块有RXOBV3、PRETAB、ORBGEN等[5],其数据处理流程如图1所示。
Bernese5.0数据处理步骤主要分为:数据准备,数据的预处理,数据处理,参数估计。
1)数据和必要文件的准备工作主要有:观测数据和星历数据的准备、观测文件格式转换、标准轨道文件的生成等。
2)数据的预处理主要完成对观测数据的预处理工作,包括先验坐标的生成、粗差探测、周跳探测和修复、单差文件的生成等。
3)参数估计,基于最小二乘估计实现对接收机钟差、大气层延迟、模糊度、基线、点位坐标(X,Y,Z)等参数的估计。

图1 Bernese GPS软件双差数据处理流程
三、Bernese GPS软件的BPE功能介绍
随着全球越来越多的参考站网络的建立,积累的大量待处理数据需要一个高度自动化的GPS数据处理软件。BPE(Bernese processing engine)就是满足GPS数据高度自动处理的独立模块[5]。
BPE是Bernese的自动处理模块[3,5],它是一个由程序、脚本文件、控制程序等组成的完整系统。BPE功能的实现依赖于程序块、脚本文件和控制文件在自动模式下的有机结合。控制文件(process control script,PCS)是BPE的核心。它运行并且控制其他程序模块,并且按照PCF文件里的顺序来逐步地运行各个处理步骤,如图2所示。
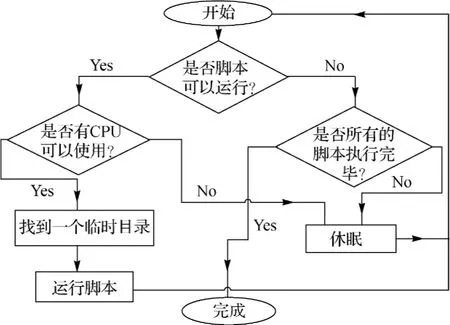
图2 PCS(process control script)文件运行流程图[2]
1)PCS是BPE的最外层脚本,它可以独立运行。运行之前要首先指定好PCF文件,PCF文件告诉PCS脚本在本项目中需要做的工作、执行的脚本文件、执行顺序等。当PCF中所有的脚本都运行完毕或者处理引擎在协议文件中发现错误时,PCS将完成处理。
2)PCF(process control file)文件定义了PCS将要执行的脚本文件或处理的模块。在PCF中列出了将要执行的脚本以及这些脚本执行的顺序。并且在PCF中定义了一些处理过程中必须的全局变量,以保证对处理过程具有相似属性的文件或参数采用一致的命名。
图3是PCF文件的部分内容,指定了BPE所要运行的批处理文件以及执行顺序。
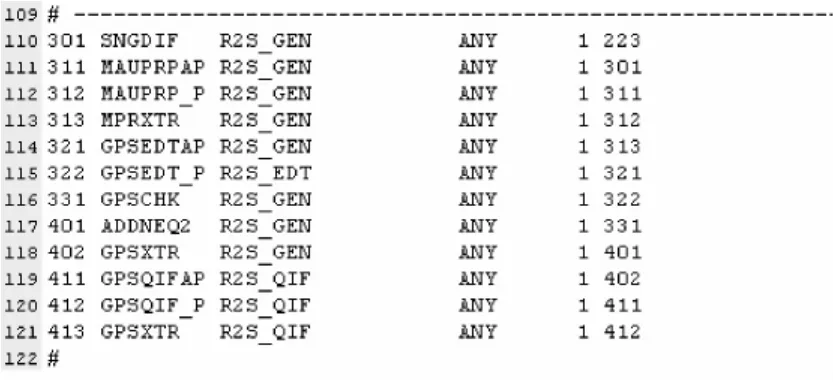
图3 PCF文件的基线形成和模糊度解算部分
四、自动处理系统AUTO-BGPS的实现
AUTO-BGPS系统的开发统一在 Visual Studio.NET 2005下进行,开发框架为FrameWork2.0。系统是针对GPS网络平台,集精密单点定位(precise point positioning,PPP)、GPS网络基线解算和平差功能于一体的数据处理软件。软件的功能菜单和主界面如图4所示。
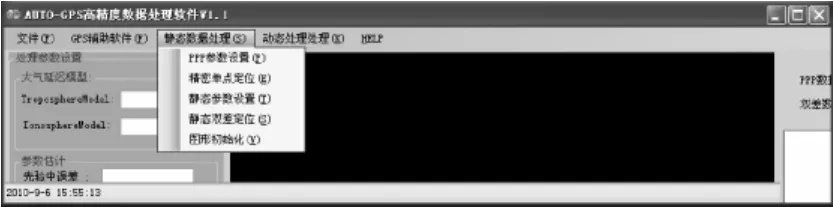
图4 软件主要功能界面
系统的主要功能是实现GPS数据的自动化高精度处理,包括两个部分:PPP和双差数据处理。同时,作为GPS数据处理软件,它附带了GPS数据处理必须的工具,如格式转换、框架转换、坐标形式转换等功能。以下具体介绍该系统的主要功能。
1.PPP模块
1)通过非差模式来快速有效地获得厘米级精度的点位坐标,该坐标也可以为双差处理提供优秀的先验坐标。
2)PPP可以计算与相位观测值相关的接收机钟差值。
3)提取传播路径上的电子总量(TEC)信息,从而可以建立与站相关的或者区域的电离层模型[5]。
4)监测点位随时间的变化。
鉴于以上功能,PPP数据处理可以提供以下几个结果:①法方程文件、站坐标、对流层参数估计、P1-P2/C1-P1之DCBs、站运动速度向量;② 总天顶延长(ZPD);③站钟差;④单点定位坐标。
2.双差定位模块
双差定位是Benrese软件的核心,通过双差可以实现高精度的测地应用。同时,也可以实现其他特殊的功能:①天顶延迟估计、太阳光压估计、地球自转参数估计[5];② 区域或者全球的对流层监测[5];③得到整个网解;④动态数据后处理。
3.数据处理的辅助功能
(1)ITRF框架转换模块
ITRF框架转换是GPS数据处理常用到的工具,涉及SP3星历框架转换、GPS成果框架转换等。考虑到坐标框架转换参数跟参考时间相关,因此框架转换采用14个参数转换(即7个转换参数加上7个转换参数的速率),实现了 ITRF2005、ITRF2000、ITRF97等框架间的逐级转换。坐标形式均为(X,Y,Z)。ITRF2005转换到ITRF2000、ITRF2000转换到其他框架的14个转换参数均为国际地球参考框架官方网站公布的整套参数。模块界面如图5所示。

图5 ITRF框架转换软件
(2)(B,L,H)—(X,Y,Z)框架转换模块
坐标形式转换基于2000国家大地坐标系使用的椭球参数,实现(B,L,H)与(X,Y,Z)的相互转换。如图6所示。
4.AUTO-BGPS系统工作流程
AUTO-BGPS系统工作流程为:①项目建立及属性设置,用户首先要建立项目,在此将设置项目的一些属性,如项目名称、文件目录、测段长度等信息;②处理模式选择;③准备文件,导入原始观测文件、星历文件、钟文件等,根据不同的处理方式导入不同的文件;④运行后台处理程序;⑤显示处理结果。

图6 (B,L,H)↔(X,Y,Z)转换软件
系统在一旦被激活,将按照以下程序进行:①下载相关文件;②准备相关文件;③卫星轨道生成;④观测文件完整性检测;⑤ 数据预处理(粗差探测,周跳探测和修复、模糊度解算);⑥ 数据处理(基线解算和平差、参数估计);⑦ 处理结果显示(画拓扑图、基线和点位结果显示等)。
基于以上几个模块,系统可以自动地完成数据的读取,星历文件和相关文件的下载、数据预处理和参数估计等数据流程,最终得到基线和点位坐标信息,并以图形的形式显示。
五、应用实例
本文结合欧洲国际IGS站的8个站:MATE、ONSA、VILL、PTBB、BRUS、FFMJ、ZIMM、ZIMJ,其中MATE、ONSA、VILL 3个站为IGS核心站,它们参加了IGS00框架的实现,十分稳定。假设 PTBB、BRUS、FFMJ、ZIMM、ZIMJ 5个站为参考站网络,并用AUTO-BGPS软件实现对该网络参考站的监测。
处理模式:以MATE、ONSA、VILL 3个站作为固定站,对其他5个站进行解算。选择一周(2003-05-22—2003-05-29)的数据作为试验数据,每个时段均为24 h。处理方式按照采用多时段连续处理,得到各参考站坐标(Xi,Yi,Zi)以及GPS网基线信息,运行结果如图7所示。
用户首先创建项目,一旦项目创建并开始运行,数据处理系统将激活后台处理模块,自动到指定目录下搜索该天数据,并按照该天的年积日,到指定网站下载相关数据,之后完成数据解算,并提取解算结果信息。在软件主界面上可以看到部分参数的设置、GPS网拓扑结构图和结果查询窗口。用户可以通过右上角的下拉框来查看相关结果内容。
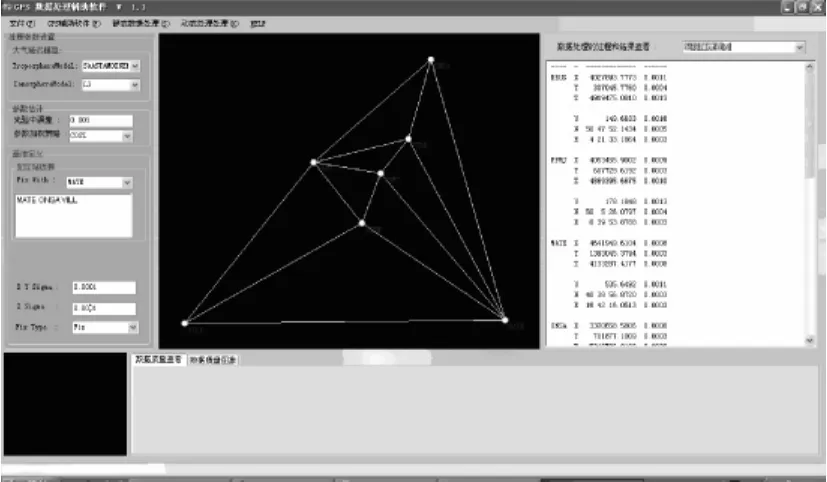
图7 AUTO-BGPS数据自动解算系统运行界面
六、结束语
本文基于Bernese5.0的GPS数据自动处理系统AUTO-BGPS,实现了GPS网络数据的无人值守的自动化处理。它可以自动下载与观测数据相关的其他数据,然后按照选定模式实现自动解算,使繁琐的人工手动处理转换为自动化的无人操作的自动处理。
通过对试验数据的解算,证明了AUTO-BGPS软件在数据的自动解算中,其处理过程是流畅的,参数设置与数据处理模块的交互是有效的,拓扑结构图的显示比例及点位相对位置是合理的,数据解算结果也是准确的,同时其附带的GPS数据处理工具运行也是正确的。该软件可以准确完成对GPS数据的自动化处理,十分适合于GPS参考站网络日常数据的准实时处理和参考站网络的日常监测,也适合于工程GPS控制网的自动解算。但是,软件也存在一些不足之处,在以后的工作研究中将继续改进。
[1] 张彩红,聂桂根,熊熊,等.基于Internet的GPS数据自动处理系统的研究[J].测绘通报,2007(8):26-28.
[2] HUGENTOBLER U,SCHAER S,FRIDEZ P.Bernese GPS Software Version 4.2[M].Berne:University of Bern,2001.
[3] 张彩虹,朱波,张黎.应用Bernese软件进行高精度GPS定位解算[J].测绘信息与工程,2006,31(3):8-9.
[4] 邓迪祥,张孟军.应用Bernese软件进行高精度的定位解算[J].人民长江,2006,37(6):38-40.
[5] DACH R,HUGENTOBLER U,FRIDEZ P,et al.Bernese GPS Software Version 5.0[M].Berne:University of Bern,2007.
[6] 黄丁发,熊永良,袁林果.全球定位系统(GPS):理论与实践[M].成都:西南交通大学出版社,2006.
[7] 郭英.基于Bernese V4.2软件的GPS动态定位研究[D].青岛:山东科技大学,2004.
A Study of Automatic GPS Data Processing System Based on Bernese GPS Software
HAN Fei,CHENG Chuanlu,WANG Xiaorui
0494-0911(2011)11-0008-03
P228.4
B
2010-12-31
韩菲(1981—),男,河南荥阳人,硕士,主要从事GPS数据处理及其理论研究。
